") 富唯智能案例|3D視覺引導(dǎo)機器人抓取鞋墊上下料
富唯智能案例|3D視覺引導(dǎo)機器人抓取鞋墊上下料

隨著制造業(yè)對自動化、智能化需求的不斷提升,如何實現(xiàn)鞋墊上下料的精準(zhǔn)、高效操作成為了企業(yè)亟待解決的問題。傳統(tǒng)的上下料方式往往依賴人工,存在效率低下、精度不足等問題。而富唯智能的3D視覺引導(dǎo)機器人抓取解決方案,則能夠有效解決這些問題。
項目背景:
 現(xiàn)場圖片
現(xiàn)場圖片
客戶需求:
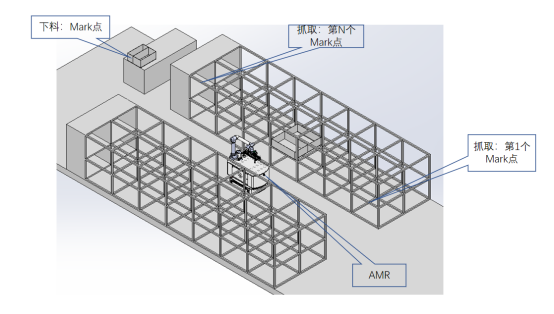
機器人根據(jù)信號從ABCD等倉儲區(qū)抓取其中一款腳墊到圖2的倉位中
 鞋墊
鞋墊
需要確認(rèn)的內(nèi)容:
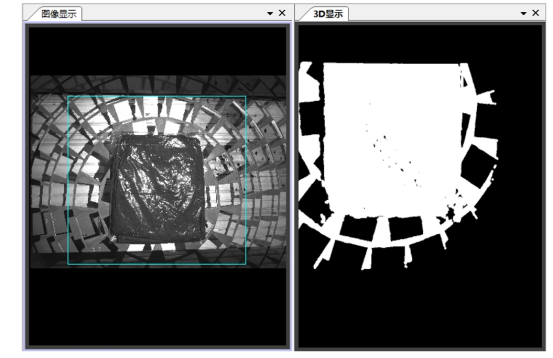
抓料是否需要視覺(距離傳感器、真空檢測) 取料位空間尺寸 塑料膜成像是否可行 料架是否會移動動(機器人底盤定位) 產(chǎn)品放置后(壓入框內(nèi))夾爪抽出 -- 后期考慮改在料箱,放置無序折疊 地坪(據(jù)說廠內(nèi)有其他AGV小車)
節(jié)拍要求:兩個產(chǎn)品間的下料間隔時間不超過58s 精度要求:>±10mm
技術(shù)特點:
高精度定位與抓取:通過3D視覺技術(shù),機器人能夠準(zhǔn)確獲取鞋墊的位置、姿態(tài)和尺寸信息,實現(xiàn)高精度的定位和抓取。 高效作業(yè):機器人可以連續(xù)工作,無需休息,大大提高了上下料的效率。 柔性適應(yīng):該解決方案具有較高的柔性,可以適應(yīng)不同形狀、尺寸和材質(zhì)的鞋墊,滿足不同生產(chǎn)線的需求。
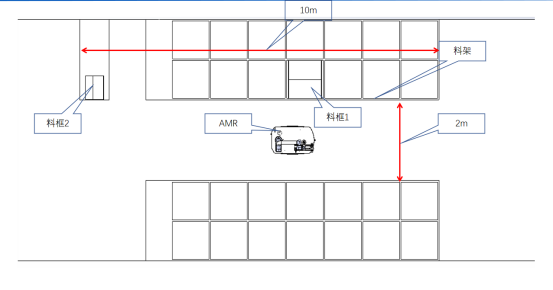 工廠車間圖紙
工廠車間圖紙
作業(yè)流程:
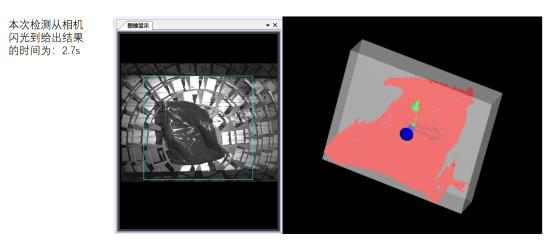
1、鞋墊識別與定位:首先,通過3D視覺系統(tǒng)對鞋墊進(jìn)行掃描,獲取鞋墊的三維信息。然后,利用圖像處理和識別算法,實現(xiàn)鞋墊的精準(zhǔn)定位和識別。
2、機器人抓取:在獲取鞋墊的位置和姿態(tài)信息后,機器人根據(jù)預(yù)設(shè)的路徑和抓取策略,對鞋墊進(jìn)行抓取。抓取過程中,機器人會實時調(diào)整抓取位置和力度,確保鞋墊的穩(wěn)定抓取。
3、上下料操作:抓取到鞋墊后,機器人將其放置到指定的位置,完成上料操作。同時,機器人還可以將已加工的鞋墊從生產(chǎn)線上取下,完成下料操作。
 車間圖紙
車間圖紙 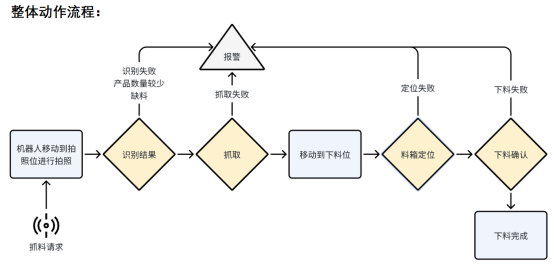 工作流程
工作流程
方案優(yōu)勢
1、提高生產(chǎn)效率:通過自動化上下料,減少了人工操作的繁瑣和等待時間,提高了生產(chǎn)效率。
2、降低不良率:由于采用了高精度的定位和抓取技術(shù),有效降低了在生產(chǎn)過程中的不良率。
 影響?
影響?
3、降低人工成本:減少了對人工操作的依賴,降低了人工成本。
4、提升企業(yè)形象:采用先進(jìn)的智能制造技術(shù),提升了企業(yè)的技術(shù)水平和形象。
通過實際應(yīng)用證明,該解決方案能夠顯著提高生產(chǎn)效率、降低不良率和人工成本,為企業(yè)帶來顯著的經(jīng)濟(jì)效益。
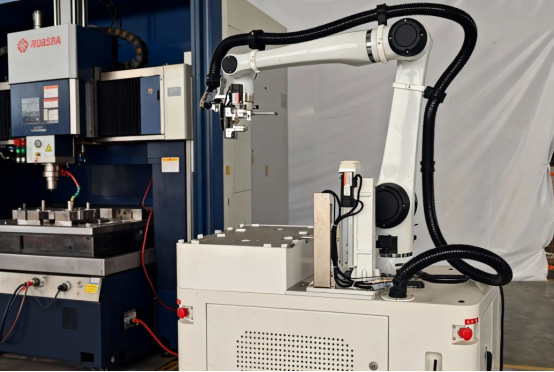
 實拍圖
實拍圖
富唯智能的3D視覺引導(dǎo)機器人抓取鞋墊上下料解決方案是一種高效、精準(zhǔn)的自動化解決方案。
審核編輯 黃宇
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222266 -
3D視覺
+關(guān)注
關(guān)注
4文章
483瀏覽量
29224
發(fā)布評論請先 登錄
3D視覺引導(dǎo)拆碼垛:一文讀懂“機器眼”如何指揮機器人搬貨?

基于3D視覺引導(dǎo)的移動式復(fù)合機器人設(shè)計:智能自動化革命的核心技術(shù)

富唯智能復(fù)合機器人:推動智慧醫(yī)院與產(chǎn)業(yè)自動化的核心技術(shù)創(chuàng)新
解放CNC產(chǎn)線的全能伙伴:一體復(fù)合機器人開啟智能上下料新篇章

解鎖“試管自動抓取搬運”新紀(jì)元:富唯智能復(fù)合機器人重塑精準(zhǔn)物流

智能融合,即刻啟航:富唯智能復(fù)合機器人引領(lǐng)柔性制造新時代
機器人上下料:驅(qū)動現(xiàn)代智能制造的高效引擎
移動的智慧:復(fù)合機器人開啟24小時不間斷上下料新紀(jì)元
奧比中光領(lǐng)跑韓國機器人3D視覺市場
15分鐘快速部署,復(fù)合機器人如何重塑“上下料機器人哪家好”的行業(yè)答案

富唯智能復(fù)合機器人力控技術(shù):重新定義精準(zhǔn)自動化
復(fù)合機器人通訊協(xié)議:富唯智能的技術(shù)突破與行業(yè)引領(lǐng)

CNC行業(yè)|復(fù)合機器人CNC上下料及自動換刀解決方案

富唯智能復(fù)合機器人醫(yī)療料箱上下料搬運案例
富唯智能最小復(fù)合機器人的強大抓取實力?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論