") 硅基片上激光雷達(dá)技術(shù)綜述
硅基片上激光雷達(dá)技術(shù)綜述

硅基光電子技術(shù)的發(fā)展可以將激光雷達(dá)系統(tǒng)發(fā)射模塊和接收模塊中分立的有源和無源器件集成在芯片上,使激光雷達(dá)體積更小、穩(wěn)定性更強、成本更低,推動激光雷達(dá)在自動駕駛等領(lǐng)域的應(yīng)用。
據(jù)麥姆斯咨詢報道,針對該領(lǐng)域發(fā)展概況,西南技術(shù)物理研究所研究陳孝林團(tuán)隊進(jìn)行了綜述分析,包括激光雷達(dá)的基本概念和常見激光雷達(dá)的測距原理,分析了常見硅基片上激光雷達(dá)系統(tǒng)的掃描方案,并討論了硅基片上激光雷達(dá)當(dāng)前面臨的挑戰(zhàn)和發(fā)展方向。相關(guān)研究內(nèi)容以“硅基片上激光雷達(dá)技術(shù)綜述”為題發(fā)表在《激光與光電子學(xué)進(jìn)展》期刊上。
激光雷達(dá)基本概念
激光波長
綜合考慮大氣窗口、人眼安全以及可選用的激光器和光電探測器,激光雷達(dá)使用的波長通常為0.8~1.55 μm,對應(yīng)使用的激光器和探測器類型如表1所示。由于車載激光雷達(dá)工作時可能面臨的環(huán)境溫度具有很大的變化范圍,因此當(dāng)系統(tǒng)中采用濾光片抑制背景光干擾時,激光器的輸出波長在溫度影響下發(fā)生變化時應(yīng)始終保持在濾光片的通帶內(nèi),這也是在選擇光源時需要考慮的問題。
表1 激光雷達(dá)波長對應(yīng)的激光器和探測器類型
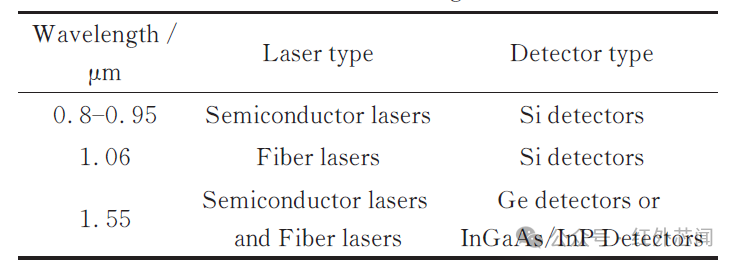
當(dāng)前激光雷達(dá)的主流波長是905 nm和1550 nm。脈沖激光雷達(dá)采用905 nm激光器,主要優(yōu)點是可以采用較為便宜的硅基探測器,并且905 nm相比1550 nm親水性較弱,光損失更小。但由于硅材料的透明窗口,它不能用在硅光子系統(tǒng)上。因為905 nm激光可以穿透人眼玻璃體到達(dá)敏感的視網(wǎng)膜,為避免視網(wǎng)膜損傷,它的峰值功率受到限制。1550 nm適用于長距離連續(xù)波激光雷達(dá)系統(tǒng),由于光在人眼的前半部分被吸收,不會危害視網(wǎng)膜,激光出射功率可以更大。這一波長通常用于通信設(shè)備,具有豐富的技術(shù)儲備,并且可以以低成本獲得連續(xù)波激光源。
探測距離
探測距離指激光雷達(dá)能發(fā)現(xiàn)目標(biāo)的最大距離,主要受到激光信號發(fā)射功率的制約。對于脈沖激光雷達(dá),探測距離還與信號的重復(fù)周期T有關(guān),因為只有當(dāng)回波信號在時間T內(nèi)返回接收系統(tǒng)時才可以解算出正確的目標(biāo)距離信息,而超出這一時間段返回的回波信號則因為與后續(xù)回波無法區(qū)分而導(dǎo)致距離模糊。對于調(diào)頻連續(xù)波(FMCW)激光雷達(dá),探測距離也受到激光線寬Δν的影響。Δν越窄,激光信號的相干長度Lc就越長,而對于相干長度以外的目標(biāo),其回波信噪比會大大降低而難以被系統(tǒng)識別。此參數(shù)一般由激光雷達(dá)對于10%低反射率目標(biāo)物的最遠(yuǎn)探測距離得到,實際應(yīng)用中由于環(huán)境和目標(biāo)表面情況的變化,數(shù)值并不是絕對的。
視場角
視場角(FOV)指激光雷達(dá)可以探測到的區(qū)域范圍,單位通常以°表示。對于車載環(huán)境應(yīng)用,激光雷達(dá)視場角必須包括水平視場角(HFOV)和垂直視場角(VFOV),視場角越大說明激光雷達(dá)對空間的角度覆蓋范圍越廣,對周圍環(huán)境的感知范圍越大。
測量精度和測量分辨率
測量精度是精確度與準(zhǔn)確度的結(jié)合。精確度指激光雷達(dá)在同一條件下多次測量得到的距離值的一致程度,而準(zhǔn)確度指激光雷達(dá)測得的距離分布的均值與真實距離的接近程度,二者分別受測量過程中的隨機誤差和系統(tǒng)誤差影響,如圖1所示。其中,距離測量的準(zhǔn)確度主要受光信號產(chǎn)生和測量系統(tǒng)影響,角度測量的準(zhǔn)確度則主要受發(fā)射端激光轉(zhuǎn)向掃描的準(zhǔn)確性影響。
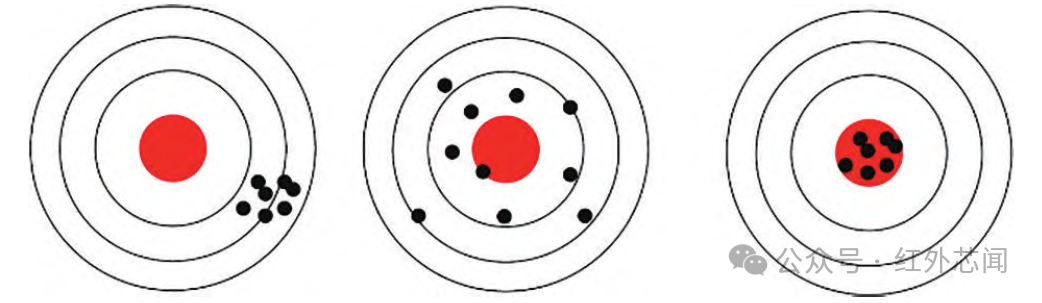
圖1 激光雷達(dá)精確度、準(zhǔn)確度
測量分辨率具體包括距離分辨率和角分辨率。距離分辨率指激光雷達(dá)單次測量中目標(biāo)能被區(qū)分的最小距離。對于脈沖激光雷達(dá),脈沖寬度越窄則距離分辨率越高;對于FMCW激光雷達(dá),距離分辨率與調(diào)制帶寬成反比,并受調(diào)頻線性度影響。角分辨率指激光雷達(dá)單次測量中目標(biāo)能被區(qū)分的最小角度,增加發(fā)射孔徑是提高角分辨率的有效手段。
硅基片上激光雷達(dá)的測距原理
脈沖飛行時間法
脈沖飛行時間法(TOF)采用直接探測方式,通過測量激光信號從發(fā)出經(jīng)目標(biāo)反射到被探測系統(tǒng)采集的時間實現(xiàn)目標(biāo)距離的測量。脈沖激光雷達(dá)的測距原理和系統(tǒng)設(shè)計都比較簡單,如圖2所示。
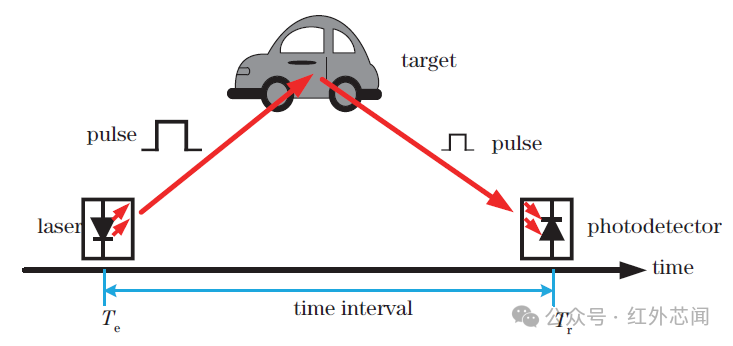
圖2 脈沖式激光雷達(dá)工作原理
脈沖激光雷達(dá)存在模糊距離,因為回波信號相對于發(fā)射信號是否偏移一個或多個周期存在著不確定性。此外,由于發(fā)射機到接收機的鏈路上光脈沖能量存在散射損耗,因此信噪比也是限制脈沖激光雷達(dá)探測范圍的主要因素。為了提高作用距離,需要增加脈沖發(fā)射功率,對于自動駕駛應(yīng)用,需要考慮人眼安全功率極限。一種方法是使用脈沖串來降低單個脈沖所需的高功率,通過積分并平均接收的功率來提高信噪比和精度。盡管存在這些限制,脈沖激光雷達(dá)簡單的探測原理和實現(xiàn)方式使其具有強大的競爭力。
調(diào)幅連續(xù)波測距法
調(diào)幅連續(xù)波(AMCW)測距法也稱間接飛行時間法。在調(diào)幅連續(xù)波激光雷達(dá)中,激光出射之前進(jìn)行了幅度調(diào)制,調(diào)制周期大于往返飛行時間,對回波信號和出射信號進(jìn)行比較。對于調(diào)幅連續(xù)波測量方法,距離分辨率由測距信號頻率和相位計分辨率共同決定,距離分辨率隨著調(diào)幅信號頻率增加而增加。與脈沖激光雷達(dá)一樣,調(diào)幅連續(xù)波激光雷達(dá)的回波信號相位經(jīng)過2π 相移后開始重復(fù),為避免多解問題,測距范圍會相應(yīng)減小。一種解決方法是選取一個調(diào)制頻率高的調(diào)制光波作為基本測尺,再引入一個或多個調(diào)制頻率較低的調(diào)制光波作為輔助測尺,綜合每個測尺的測量結(jié)果以獲得精確的測量值。
隨機調(diào)制連續(xù)波測距法
隨機調(diào)制連續(xù)波(RMCW)測距法將偽隨機比特序列(PRBS)調(diào)制到出射激光的幅度或相位上,通過使用匹配濾波器等方式計算接收到的返回激光信號與PRBS的原始模板之間的相關(guān)性來獲得接收光的飛行時間,如圖3所示。由于PRBS只與自身相關(guān),因此RMCW激光雷達(dá)對陽光、燈光和其他激光雷達(dá)的光等不敏感。然而,此技術(shù)對相對速度、激光相位噪聲和散斑具有敏感性,這是較大的技術(shù)挑戰(zhàn)。在激光雷達(dá)應(yīng)用領(lǐng)域,澳大利亞初創(chuàng)激光雷達(dá)公司Baraja是RMCW技術(shù)的典型代表,該公司采用RMCW技術(shù)結(jié)合獨特的棱鏡色散光譜掃描技術(shù)研制出型號為Spectrum HD的車載級雷達(dá)。
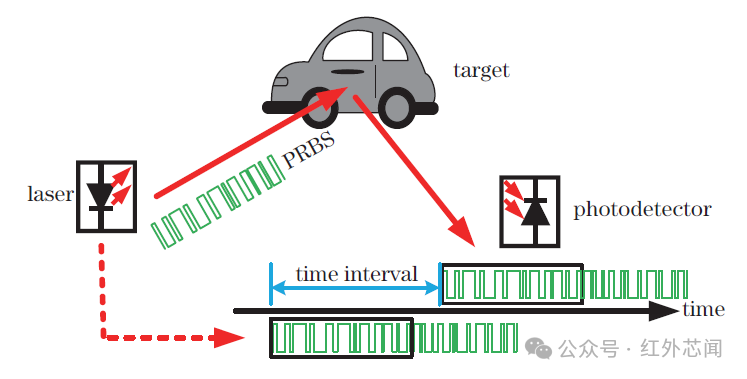
圖3 RMCW激光雷達(dá)系統(tǒng)示意圖
調(diào)頻連續(xù)波激光測距法
FMCW激光雷達(dá)采用頻率隨時間周期性變化的調(diào)制信號進(jìn)行探測,返回的光信號與本振光信號相干,根據(jù)混頻產(chǎn)生的中頻信號的頻率可以測量目標(biāo)物的距離,它的信號調(diào)制形式有三角波、鋸齒波、正弦波等。其中,正弦波調(diào)制信號檢測物體時需要調(diào)節(jié)信號頻偏,因此大多應(yīng)用于只有一個探測目標(biāo)的情況,對于自動駕駛應(yīng)用中對多個目標(biāo)的探測需求,一般采用三角波或者鋸齒波。三角波可以同時得到物體的距離和速度信息,鋸齒波則主要用來測量物體的距離。對于三角波探測,當(dāng)目標(biāo)運動時,信號發(fā)生多普勒頻移,反射信號和本振信號之間的頻率差在線性調(diào)頻的上升段和下降段具有不同的拍頻頻率,如圖4所示。
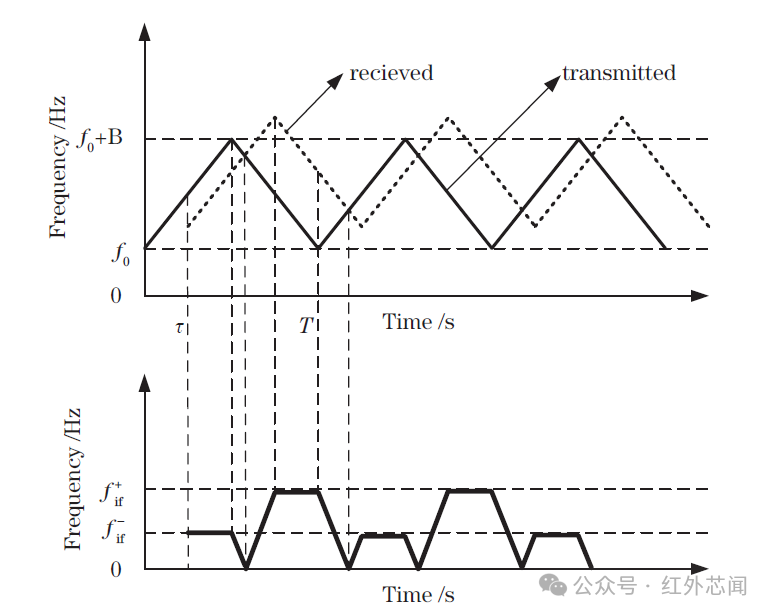
圖4 FMCW激光雷達(dá)測量原理
與脈沖測距法相比,F(xiàn)MCW測距具有許多優(yōu)勢。第一,它采用相干探測,不受陽光、城市人造光及附近的其他激光雷達(dá)系統(tǒng)的干擾,提高了信噪比。第二,它可以通過檢測信號的多普勒頻移來直接獲取目標(biāo)的運動速度。第三,它的探測精度取決于線性調(diào)頻帶寬和信噪比,可以通過相對低頻的接收器電子設(shè)備實現(xiàn),相比之下脈沖測距精度受到接收器帶寬的限制。第四,它的檢測靈敏度高,不需要很高的激光功率,因此也不會在波導(dǎo)中產(chǎn)生非線性效應(yīng),加上它不需要用到雪崩光電二極管(APD)和高速檢測電路,所以適應(yīng)激光雷達(dá)的硅基集成化發(fā)展。它的主要技術(shù)難點在于線性調(diào)頻光信號的獲取,解決方法有采用干涉儀、光頻梳、微諧振器等校準(zhǔn)掃頻激光器,或者在外部級聯(lián)光調(diào)制器等。
硅基片上激光雷達(dá)的掃描實現(xiàn)方式
面陣閃光激光雷達(dá)
flash脈沖激光雷達(dá)的工作模式類似于照相機,它基于TOF原理,系統(tǒng)發(fā)射具有高重復(fù)頻率的脈沖光束,脈沖光束完全照亮整個視場。由于空間中存在目標(biāo)物,探測器陣列中每個單元獲取的光子具有不同的飛行時間,據(jù)此可以獲得距離信息,實現(xiàn)三維成像。荷蘭代爾夫特理工大學(xué)演示了一種flash激光雷達(dá)。圖5a給出了該雷達(dá)系統(tǒng)使用的單光子雪崩二極管(SPAD)芯片,它采用0.18 μm CMOS工藝制造,尺寸為21.6 mm × 10.2 mm,具有252 pixel × 144 pixel和1728個12位時間數(shù)字轉(zhuǎn)換器(TDC),其上約70%的面積為部分直方圖讀出電路(PHR),作用是將原始數(shù)據(jù)處理為直方圖數(shù)據(jù)輸出,壓縮輸出的數(shù)據(jù)量。芬蘭奧盧大學(xué)提出的flash激光雷達(dá)系統(tǒng)采用了基于塊的分段照明策略,如圖5b所示。西安電子科技大學(xué)采用0.18 μm HV CMOS工藝制造了2.9 mm × 2.9 mm的flash脈沖激光雷達(dá)芯片,如圖5c所示。該團(tuán)隊利用基于此芯片的激光雷達(dá)系統(tǒng)成功演示了4.5 m處的室內(nèi)3D成像,在超過20 m的室外測距實驗中,相對測量誤差不超過0.35%,如圖5d所示。
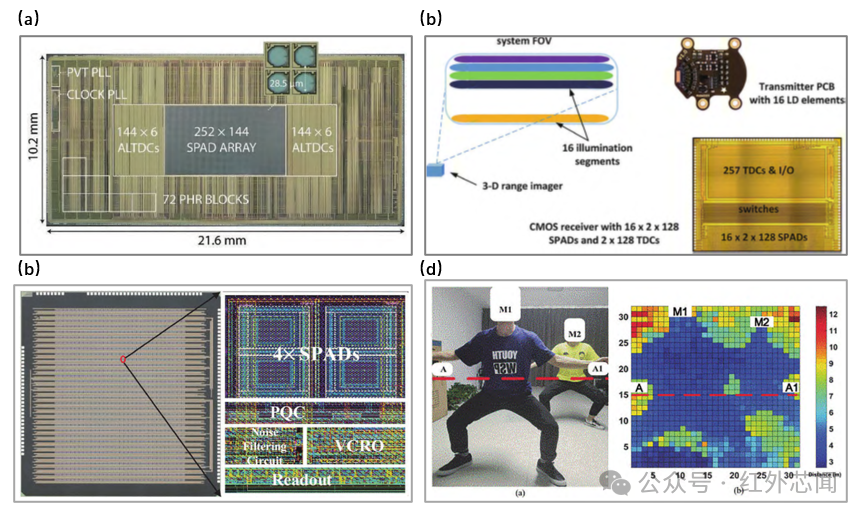
圖5 flash脈沖激光雷達(dá)樣例
flash激光雷達(dá)的系統(tǒng)中沒有運動部件,具有抗振動、體積小、價格低等優(yōu)點。其點云是由單次激光脈沖生成的,而非逐點構(gòu)建,因此可以解決時間同步問題。其缺點是需要較高的激光峰值功率以同時照亮大的空間區(qū)域,信噪比低,檢測距離和視場有限,性能還會受到目標(biāo)物反射率的影響。由于雷達(dá)的距離分辨力率和角分辨率直接受限于探測器陣列的規(guī)模和性能,而大規(guī)模陣列意味著大數(shù)據(jù)處理量,因此成像分辨率和成像速度之間需要進(jìn)行平衡。此外,從目標(biāo)表面反射的回波信號往往很弱,探測器往往需要采用昂貴的SPAD。
光學(xué)相控陣激光雷達(dá)
OPA中主要包括分光器、移相器和天線等3個部分。其中,移相器為光信號引入相位延遲,主要通過熱光效應(yīng)或電光效應(yīng)實現(xiàn),天線通常采用光柵耦合器、邊緣耦合器或端射耦合器的形式。OPA通過控制光通過微波導(dǎo)的相位,從而控制波前的形狀和方向,實現(xiàn)光束偏轉(zhuǎn)。
2017年麻省理工學(xué)院電子研究實驗室首次在硅光子芯片上展示了采用三角波調(diào)制的FMCW激光雷達(dá),如圖6所示。美國Analog Photonics公司展示了相干二維固態(tài)激光雷達(dá)原型系統(tǒng),其中使用了兩個大型OPA,首次展示了使用OPA實現(xiàn)的實時3D相干激光雷達(dá)系統(tǒng),獲取的圖像如圖7所示,其中,清晰地展示了7 m外站立的人的手臂和腿部等特征。
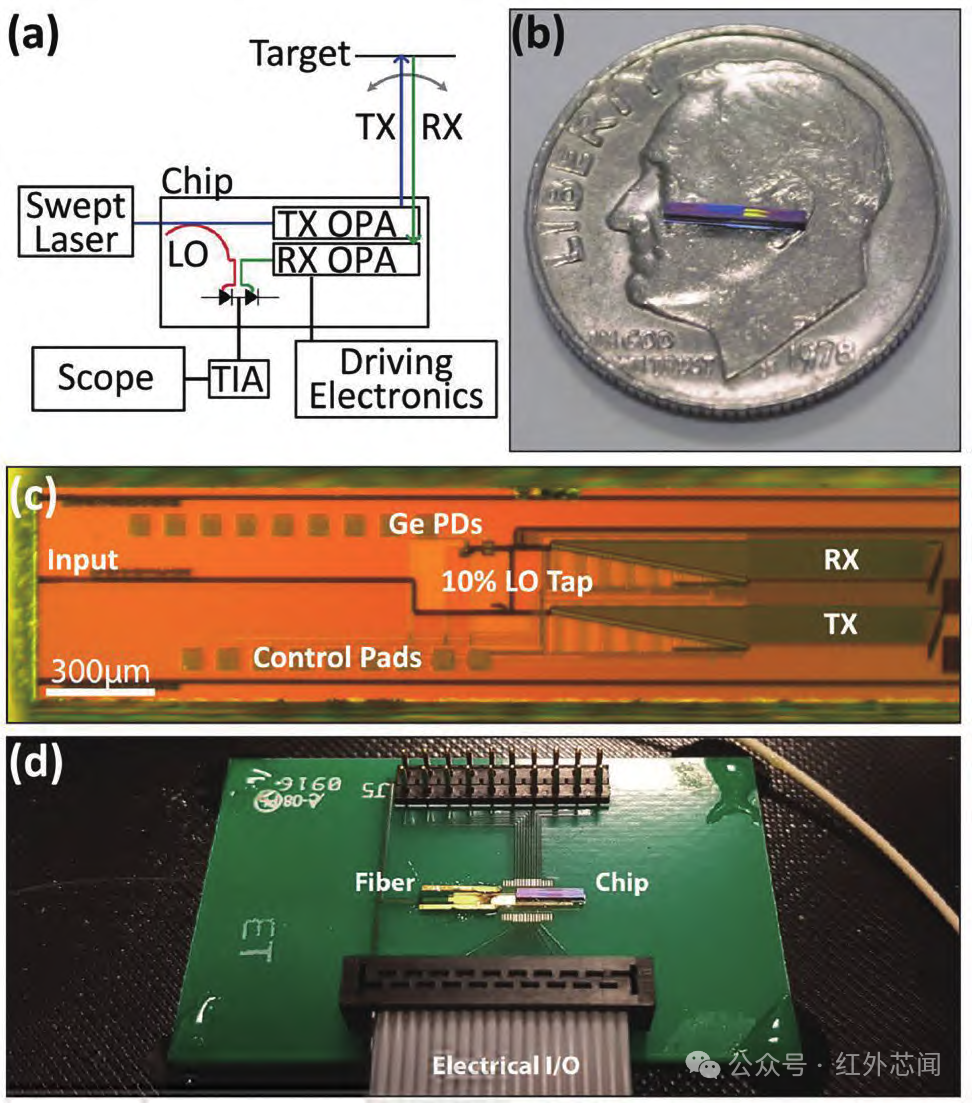
圖6 FMCW激光雷達(dá)系統(tǒng)
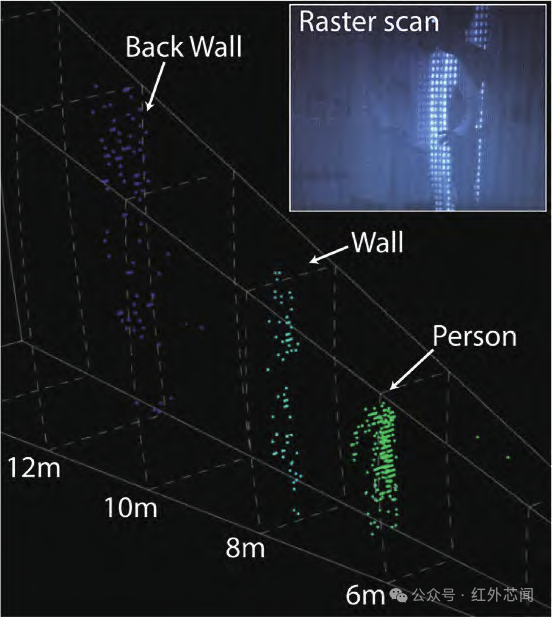
圖7 來自基于光柵掃描的OPA的3D LiDAR系統(tǒng)的實時數(shù)據(jù),插圖顯示被光柵掃描的場景
三星電子于2020年展示了帶有集成半導(dǎo)體光放大器(SOA)的32通道硅光子OPA。該公司還首次展示了不使用外部光源或放大器的芯片級激光雷達(dá)解決方案,如圖8A所示。2021年,三星電子通過III-V-on-Si工藝將可調(diào)諧激光二極管、SOA和32通道的OPA集成在8.7 mm × 3 mm單芯片上,如圖8B所示。吉林大學(xué)在多層SiN-SOI平臺上制造了分別具有魚骨結(jié)構(gòu)和鏈?zhǔn)浇Y(jié)構(gòu)的兩個128通道OPA,其圖像如圖8C所示。
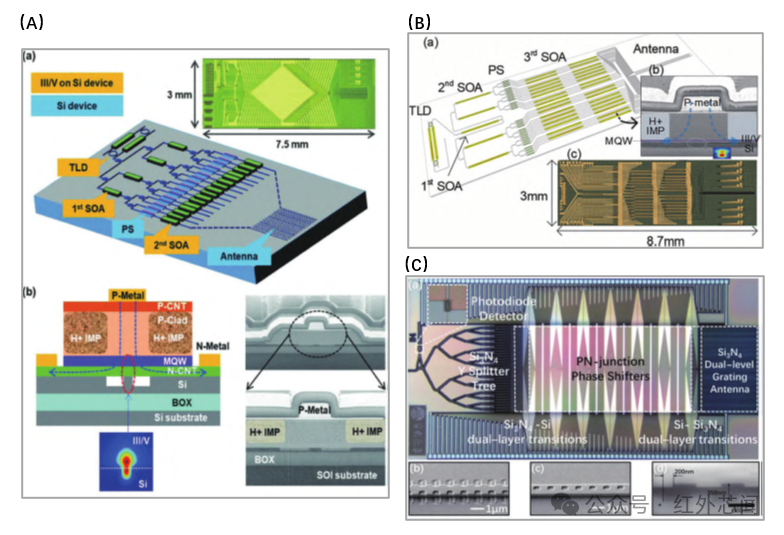
圖8 OPA樣例
OPA結(jié)構(gòu)緊湊,制造成本低,對于機械沖擊和振動不敏感,因為沒有運動部件而完全沒有慣性,且任意時刻的掃描方向只由當(dāng)前調(diào)用的相位查找表決定,與前一時刻的掃描方向無關(guān),在高速掃描下可以實現(xiàn)具有高方向增益的隨機指向。由于陣列中的所有光學(xué)天線需要進(jìn)行精確的幅度和相位控制,擴大OPA的制造規(guī)模比較困難。目前大多數(shù)能做到寬視野的大規(guī)模OPA只是一維陣列,另一個方向的掃描通常通過調(diào)諧激光器的波長實現(xiàn)。此外OPA還面臨著較高的光損耗、陣列串?dāng)_、熱穩(wěn)定性等挑戰(zhàn),它較低的片上光功率也會限制遠(yuǎn)距離探測。從廣義上來說,液晶超表面(LCM)技術(shù)也屬于特殊的OPA,該技術(shù)使用液晶來調(diào)整超表面以創(chuàng)建可以快速更改的反射光柵改變衍射角,由于技術(shù)尚在發(fā)展中,所以信息量有限。
透鏡輔助光束轉(zhuǎn)向激光雷達(dá)
透鏡輔助光束轉(zhuǎn)向(LABS)技術(shù)具有類似相機的光學(xué)系統(tǒng),包括片上開關(guān)/天線陣列和片上(或片外)透鏡,陣列位置與透鏡的焦平面重合,所以也可稱為基于焦平面陣列(FPA)的光束轉(zhuǎn)向技術(shù)。陣列中采用的開關(guān)通常為Mach-Zehnder(MZ)干涉儀開關(guān)、MEMS開關(guān)和環(huán)形諧振器開關(guān)。通過打開特定的開關(guān),入射光被引導(dǎo)到相應(yīng)的天線進(jìn)行準(zhǔn)直,經(jīng)透鏡出射發(fā)生規(guī)定的角度偏轉(zhuǎn),進(jìn)入自由空間。在這一技術(shù)中,每次只有一個發(fā)射器發(fā)射一束光,通過將光束切換到不同的發(fā)射器來控制光束的發(fā)射角度,光束的掃描是離散的。
2020年上海交通大學(xué)演示了基于LABS的固態(tài)脈沖激光雷達(dá),如圖9A所示。該團(tuán)隊此后還在單個片上二維收發(fā)器陣列芯片上同時實現(xiàn)了光束發(fā)射、轉(zhuǎn)向和接收,如圖9B(a)所示。美國加州大學(xué)伯克利分校開發(fā)出一種新型高分辨率芯片激光雷達(dá),它采用基于MEMS工藝的128 pixel × 128 pixel的焦平面開關(guān)陣列(FPSA),并將其集成在尺寸為10 mm × 11 mm的硅光子芯片上,如圖10所示。2021年來自美國的Pointcloud Inc.和英國南安普敦大學(xué)光電研究中心的研究團(tuán)隊展示了基于FPA的全固態(tài)集成光子激光雷達(dá),圖11(a)展示了此系統(tǒng)的示意圖。
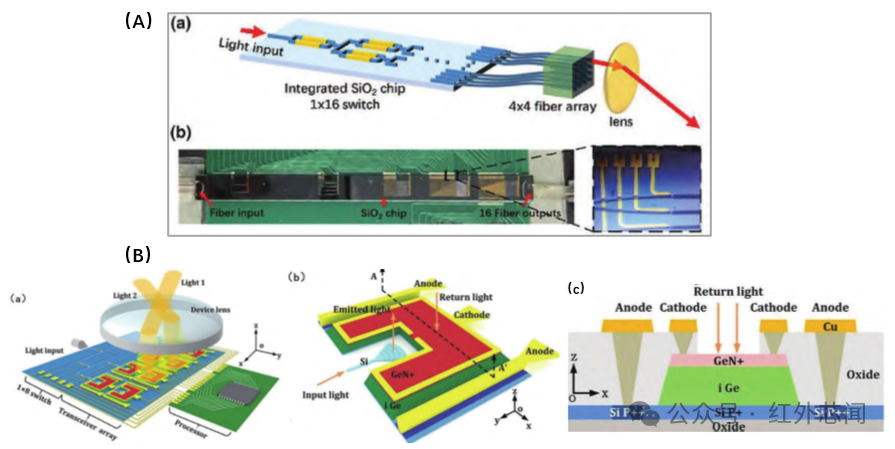
圖9 LABS技術(shù)
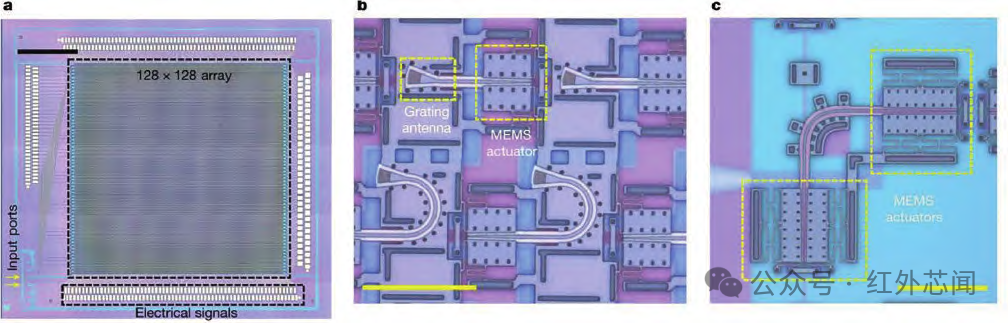
圖10 FPSA器件的顯微圖像
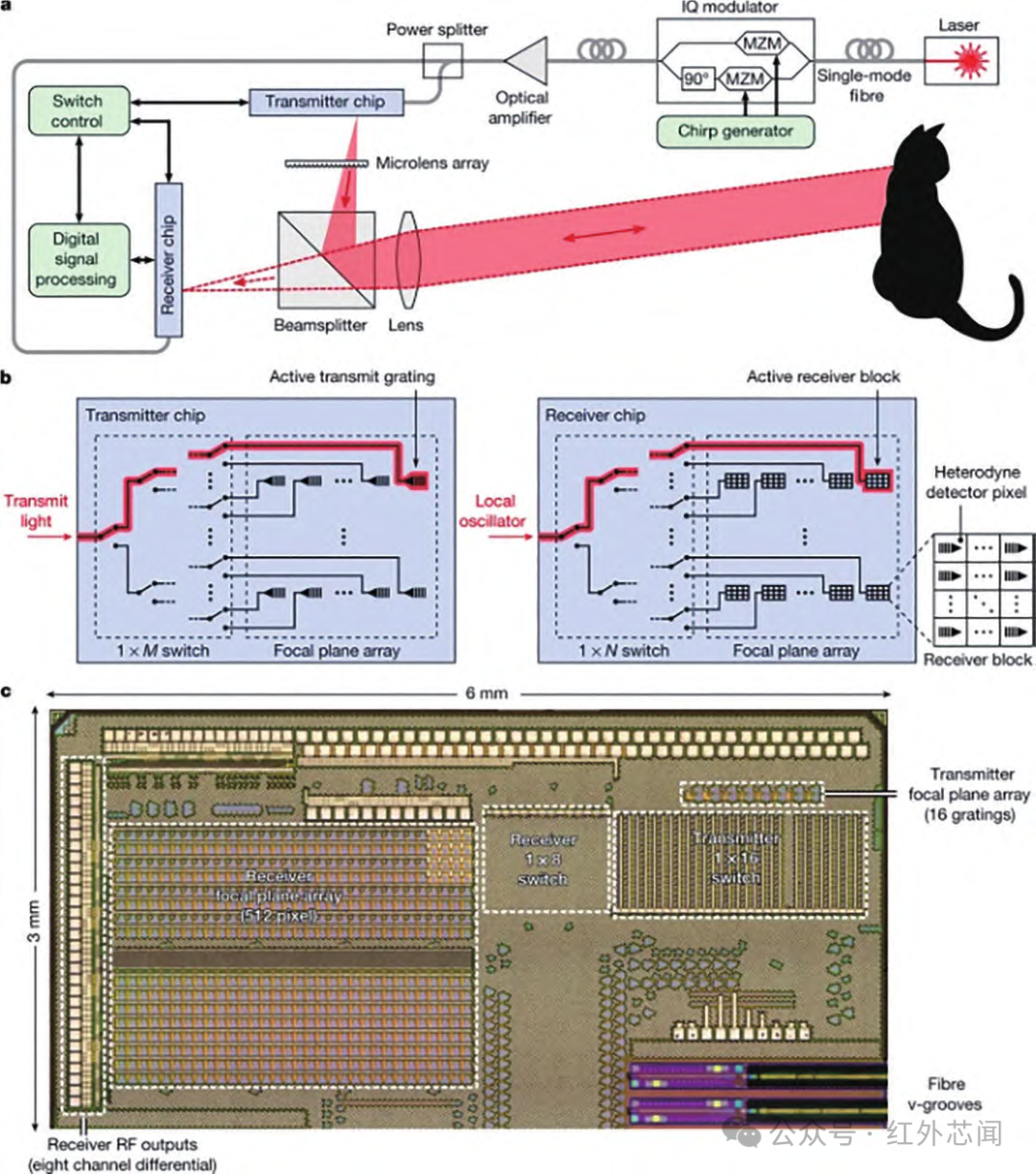
圖11 固態(tài)三維成像激光雷達(dá)
LABS技術(shù)可以實現(xiàn)快速隨機掃描,它最突出的優(yōu)點在于只需要對二進(jìn)制開關(guān)進(jìn)行控制,控制簡單,制造成本低。此外,它的天線布置靈活,允許更大的像素密度,還可以實現(xiàn)二維轉(zhuǎn)向。由于開關(guān)和光束角度的對應(yīng)關(guān)系,為了獲得高分辨率圖像,開關(guān)的數(shù)量也要盡可能地增加,同時也需考慮透鏡像差帶來的光束畸變問題。當(dāng)光束轉(zhuǎn)向步長角太大時,位于兩束光之間的小目標(biāo)會被遺漏,使系統(tǒng)存在盲區(qū)。
慢光光柵激光雷達(dá)
慢光光柵(SLG)以自由空間光束的形式發(fā)射導(dǎo)模,通過改變波長或波導(dǎo)折射率進(jìn)行控制。2022年日本橫濱國立大學(xué)將SLG與Ge光電二極管相結(jié)合,在芯片上構(gòu)建了基于零差探測的FMCW激光雷達(dá)系統(tǒng),系統(tǒng)外觀如圖12所示。
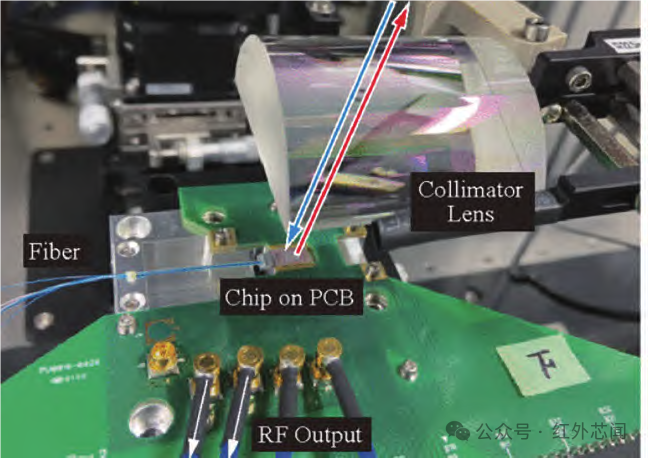
圖12 FMCW激光雷達(dá)芯片
由于慢光效應(yīng),SLG的光束角相比通常的波導(dǎo)光柵對波長和折射率更加敏感。與OPA和FPA相比,SLG減輕了光學(xué)天線的大規(guī)模集成和相位校準(zhǔn)的負(fù)擔(dān),同時通過固定激光波長的熱光效應(yīng)可以實現(xiàn)大范圍和高分辨率的光束掃描。不足的是,由于該技術(shù)利用了熱光效應(yīng),結(jié)構(gòu)邊緣的溫度不均勻性會干擾光束角度,加熱的效率也會制約掃描速率,且整個系統(tǒng)可能需要引入額外的溫控系統(tǒng)以控制外界溫度的干擾。此外,該技術(shù)對刻蝕均勻性的要求也較高。由于研究尚處于起步階段,該技術(shù)的光學(xué)損耗和噪聲較大,檢測距離有限,其實用性還需進(jìn)一步的研究來證明。
其他激光雷達(dá)
當(dāng)激光雷達(dá)只有固定角度的測距需求時,系統(tǒng)因為無需光束轉(zhuǎn)向機構(gòu)而可以大大簡化。例如法國泰雷茲集團(tuán)展示的基于硅光子平臺的FMCW激光雷達(dá),如圖13所示。
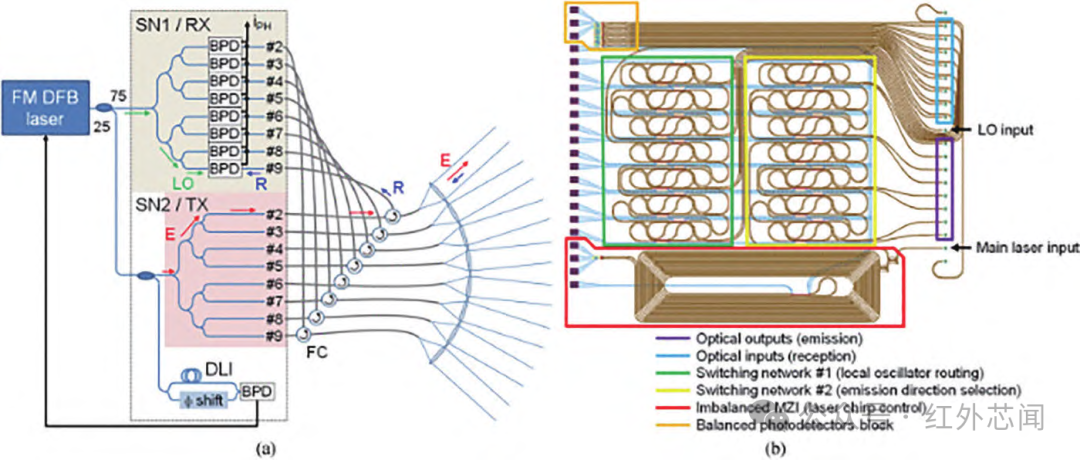
圖13 基于硅光子平臺的FMCW激光雷達(dá)
與LABS技術(shù)類似,這種結(jié)構(gòu)可以實現(xiàn)快速隨機掃描,并且結(jié)構(gòu)靈活,制造成本低,同時也存在盲區(qū)問題。此外,該結(jié)構(gòu)對輸出端環(huán)形器和準(zhǔn)直器的需求使得系統(tǒng)連線復(fù)雜,沒有完全發(fā)揮出硅基系統(tǒng)的優(yōu)勢。
總結(jié)與展望
憑借著精度高、抗干擾能力強等優(yōu)點,激光雷達(dá)成為了車輛感知系統(tǒng)的重要配置,在無人駕駛領(lǐng)域具有廣闊的應(yīng)用前景。面對車載激光雷達(dá)極具潛力的商用市場,傳統(tǒng)掃描型激光雷達(dá)在成本和可靠性等方面難以突破現(xiàn)有的瓶頸,而固態(tài)激光雷達(dá)卻有著強大的發(fā)展?jié)摿Γ琈obileEYE、AEVA和速騰聚創(chuàng)等國內(nèi)外廠商紛紛投入產(chǎn)品研發(fā)或布局相關(guān)產(chǎn)業(yè)。
歷經(jīng)多年發(fā)展,硅基光電子技術(shù)無論在材料、設(shè)備或是加工制造、封裝測試等各個方面都積累了大量成熟的技術(shù),是激光雷達(dá)理想的集成平臺。本綜述立足于硅基片上激光雷達(dá)固態(tài)掃描方案,重點介紹了flash、OPA、LABS和SLG這4種技術(shù)近5年的研究進(jìn)展,并對它們的技術(shù)特點進(jìn)行了總結(jié)。就未來的市場應(yīng)用而言,flash激光雷達(dá)結(jié)構(gòu)簡單,發(fā)展較成熟,目前已有LeddarTech Pixell等產(chǎn)品出現(xiàn),但因為探測距離及精度有限,主要用于低速和精度要求較低的應(yīng)用場景,還難以作為汽車的主雷達(dá)使用。OPA體積緊湊,掃描速度快,具有低成本量產(chǎn)的可行性,也很適合與FPA或衍射光柵結(jié)合而實現(xiàn)二維光束轉(zhuǎn)向,是當(dāng)前的研究主流。雖然目前的產(chǎn)業(yè)鏈仍不成熟,實際產(chǎn)品制造存在較大的技術(shù)難點,短期內(nèi)難以實現(xiàn)量產(chǎn),但Quanergy的S系列產(chǎn)品也已經(jīng)在推進(jìn)產(chǎn)品化進(jìn)程。相比之下,LABS技術(shù)和SLG技術(shù)發(fā)展較晚,缺少技術(shù)累積與實用性證明,目前還停留在研究階段,距離商品化還有很長的路要走。
對于整個激光雷達(dá)系統(tǒng)來說,目前除掃描系統(tǒng)以外,激光源、調(diào)制模塊、放大器及光電探測器等其余一些組件也已經(jīng)有了芯片化成果,但分立的芯片器件之間仍需要通過光纖或空間耦合,功耗、體積和穩(wěn)定性等問題依然存在。但隨著研究者們對異構(gòu)集成平臺的開發(fā),可以預(yù)見,未來的硅基芯片上將可以集成激光雷達(dá)系統(tǒng)中所需的各個有源和無源器件,使激光雷達(dá)完全實現(xiàn)芯片化,從而提高系統(tǒng)工作的穩(wěn)定性,簡化制造和安裝流程,大大降低其體積和生產(chǎn)成本,最終提升激光雷達(dá)在無人駕駛等領(lǐng)域的競爭力。
論文信息:
DOI: 10.3788/LOP222426
-
信噪比
+關(guān)注
關(guān)注
3文章
272瀏覽量
29639 -
光信號
+關(guān)注
關(guān)注
0文章
462瀏覽量
28412 -
激光雷達(dá)
+關(guān)注
關(guān)注
979文章
4470瀏覽量
196547 -
光電探測器
+關(guān)注
關(guān)注
4文章
279瀏覽量
21495 -
自動駕駛
+關(guān)注
關(guān)注
793文章
14884瀏覽量
179917
原文標(biāo)題:綜述:硅基片上激光雷達(dá)技術(shù)
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
自動駕駛激光雷達(dá)會傷害人體嗎?

禾賽科技位列全球激光雷達(dá)行業(yè)專利第一

如何解決激光雷達(dá)點云中“鬼影”和“膨脹”問題?

禾賽科技與理想汽車?yán)m(xù)簽激光雷達(dá)合作
激光雷達(dá)為什么會出現(xiàn)串?dāng)_的問題?

800線!禾賽發(fā)布ETX激光雷達(dá)

FMCW激光雷達(dá),加速落地工業(yè)場景
SPAD席卷車載激光雷達(dá)市場
超酷的樹莓派激光雷達(dá)掃描儀!

激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

激光雷達(dá)調(diào)研紀(jì)要
激光雷達(dá)技術(shù)在自動駕駛汽車中的應(yīng)用

激光雷達(dá)技術(shù)原理解析
激光雷達(dá)技術(shù):自動駕駛的應(yīng)用與發(fā)展趨勢




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論