 伺服電機脈沖和總線方式區別
伺服電機脈沖和總線方式區別

伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。伺服電機轉子轉速受輸入信號控制,并能快速反應,在自動控制系統中,用作執行元件,且具有機電時間常數小、線性度高等特性,可把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。按控制方式可分為:脈沖型和總線型。
一、伺服電機脈沖方式
伺服電機脈沖方式是通過控制器向驅動器發送脈沖信號控制電機運動,由于每一次脈沖的頻率和寬度是固定的,因此可以通過控制脈沖的頻率和寬度來控制電機的運動狀態。這種方式簡單可靠,適用于需要高精度控制的場合,如數控機床、印刷機等。
優點:
1.控制精度高。每一個脈沖的頻率和寬度都是固定的,因此可以實現高精度控制。
2.可靠性高。該方式結構簡單,沒有總線傳輸過程中可能出現的干擾和丟失數據等問題。
3.系統成本低。基于脈沖控制的伺服系統結構簡單,成本低。
缺點:
1.控制靈活度低。該方式不能實現多軸協調控制,適用于單軸高精度控制場合。
2.布線復雜。每一個伺服電機的控制信號都需要獨立引出,布線復雜。
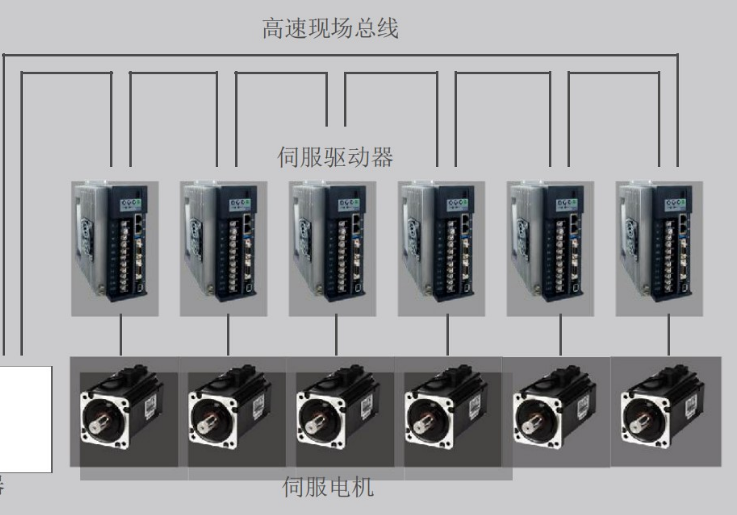
二、總線方式
總線方式是通過總線傳輸控制信號,實現對多個伺服電機的控制。該方式相對于脈沖控制具有更高的控制靈活性,可以實現多軸協調控制。總線方式適用于需要實現復雜運動控制的場合,如機器人、自動化生產線等。
優點:
1.靈活度高。可以實現多軸協調運動控制,適用于復雜運動控制場合。
2.布線簡單。總線方式只需引出一根總線,布線簡單。
缺點:
1.控制精度低。總線傳輸過程中可能出現干擾和丟失數據等問題,影響控制精度。
2.系統成本高。基于總線的伺服系統結構復雜,成本較高。
結論:
伺服電機脈沖方式適用于單軸高精度控制場合,控制精度高,成本低。總線方式適用于需要實現復雜運動控制的場合,具有更高的靈活性,但成本較高。根據不同的應用場合可以選擇不同的控制方式。
『科瑞特自動化技術』專業提供工業自動化運動控制技術及解決方案!
---(激光)焊接、拋光、切割、直坐標機器人(桁架機械手)、等特種數控設備運動控制系統,(步進電機、伺服電機、驅動器、電源)。
審核編輯 黃宇
-
脈沖
+關注
關注
20文章
908瀏覽量
99738 -
總線
+關注
關注
10文章
3040瀏覽量
91660 -
伺服電機
+關注
關注
88文章
2185瀏覽量
61276
發布評論請先 登錄
關于步進電機脈沖和步距角相關的問題

三菱FX3U PLC控制伺服電機的高速脈沖模式解析

伺服電機的控制方式簡述

派克Parker防爆伺服電機與普通伺服電機的區別


舵機與伺服電機的區別是什么?
伺服電機的三種制動方式有什么區別?

【技術揭秘】PCle-1E16的脈沖控制,如何實現電機的精準驅動?

伺服總線通訊協議有哪些?有哪些區別?
伺服電機中的回原點方式




 工商網監
工商網監
評論