") 求一種電動(dòng)夾爪的運(yùn)動(dòng)控制方案
求一種電動(dòng)夾爪的運(yùn)動(dòng)控制方案

夾爪的應(yīng)用是機(jī)器人、機(jī)械手臂末端執(zhí)行器,其穩(wěn)定、高效、精準(zhǔn)、科技化的特點(diǎn),有效提高了各行各業(yè)生產(chǎn)效率,解決工業(yè)化精密運(yùn)動(dòng)控制的難題。電動(dòng)夾爪通過(guò)電機(jī)、傳動(dòng)系統(tǒng)、減速器及夾爪控制系統(tǒng)組成,兩端的夾爪可根據(jù)不同的夾持力,連續(xù)閉合和張開實(shí)際物體的夾取運(yùn)動(dòng)。
夾爪的原理
夾爪的開合運(yùn)動(dòng)的動(dòng)力源,通常采用的是步進(jìn)伺服、伺服電機(jī)和直流無(wú)刷電機(jī),具有高響應(yīng)的優(yōu)勢(shì)。其原理是通過(guò)控制器控制電機(jī)的傳動(dòng)、轉(zhuǎn)速及方向,讓夾爪夾取或者松開操作。可通過(guò)夾爪的位置、夾取速度及夾取的力度來(lái)實(shí)現(xiàn)夾爪的運(yùn)動(dòng)。
伺服電動(dòng)夾爪控制
采用伺服電機(jī)傳動(dòng)的夾爪,具有高精度的優(yōu)勢(shì)。
1、位置控制
通過(guò)對(duì)伺服電機(jī)電流的位置閉環(huán)控制,控制夾爪在指定的位置上夾住物體。位置模式的閉環(huán),可通過(guò)傳感器檢測(cè)夾爪的位置,然后計(jì)算出誤差值,再發(fā)送信號(hào)讓電機(jī)運(yùn)動(dòng)到精確的位置。
2、速度控制
通過(guò)對(duì)電機(jī)的轉(zhuǎn)速來(lái)精確控制。一般是在特別的運(yùn)行場(chǎng)合,已知物體的大小規(guī)格并且是一致的情況下,通過(guò)閉環(huán)控制速檢測(cè)反饋,或開閉控制預(yù)設(shè)信號(hào)的方式,實(shí)現(xiàn)控制夾爪的運(yùn)動(dòng)速度。
3、扭矩(力矩)控制
通過(guò)夾取力度、夾取物體的力來(lái)控制夾爪的運(yùn)動(dòng)。閉環(huán)控制時(shí)通過(guò)傳感器檢測(cè),或者開環(huán)控制下預(yù)設(shè)夾持力信號(hào),實(shí)現(xiàn)夾取運(yùn)動(dòng)。
應(yīng)用領(lǐng)域
1、工業(yè)自動(dòng)化:工業(yè)自動(dòng)化流水線生產(chǎn)多軸運(yùn)動(dòng)過(guò)程中,機(jī)械手臂末端夾爪的快速夾取及放置物體,提高效率及產(chǎn)能。
2、機(jī)器人:人工智能機(jī)器人模擬人工手部夾取物體運(yùn)動(dòng),實(shí)現(xiàn)機(jī)器人仿人工自動(dòng)化操作。
3、醫(yī)療領(lǐng)域:移液站移液設(shè)備,夾取液體運(yùn)動(dòng),處理液體樣品的精密運(yùn)動(dòng)。也常用在實(shí)驗(yàn)室、科研測(cè)試中。
4、大型物流倉(cāng)儲(chǔ):快速搬動(dòng)大型貨物。
TMC精密運(yùn)動(dòng)控制方案
我們有整套電機(jī)結(jié)構(gòu)和驅(qū)動(dòng)模塊調(diào)試效果。(如下視頻)
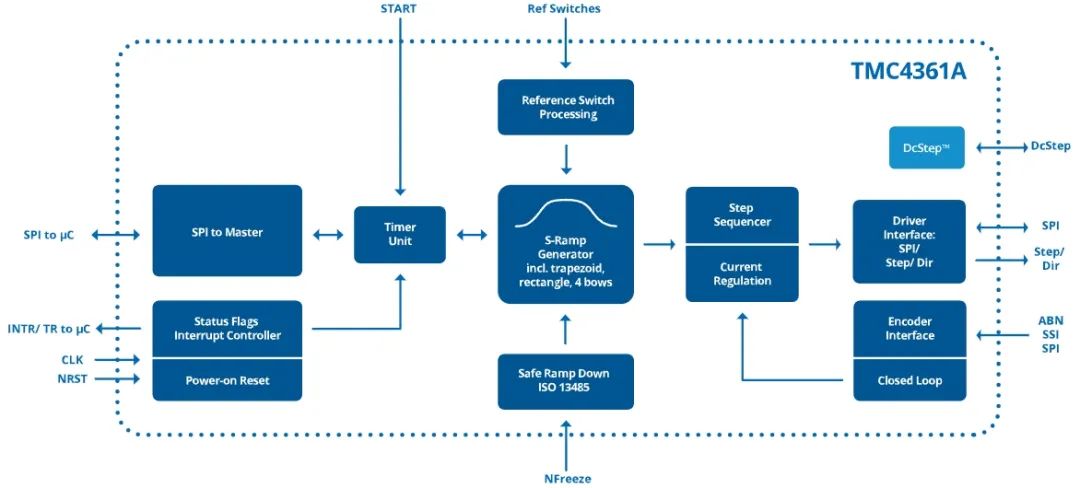
1、步進(jìn)伺服方案:TMC4361是一種步進(jìn)電機(jī)伺服控制器,內(nèi)置閉環(huán)算法+電流控制,可實(shí)現(xiàn)電機(jī)的力矩環(huán)、速度環(huán)、位置環(huán)控制。步進(jìn)伺服具備成本低、扭矩高等特點(diǎn),也常用于夾爪的應(yīng)用中。該驅(qū)動(dòng)器內(nèi)置斜坡(曲線加減速)發(fā)生器,具有S形斜坡、SixPoint (六點(diǎn)斜坡)運(yùn)動(dòng)控制,允許運(yùn)動(dòng)過(guò)程中切換,避免電機(jī)加速過(guò)程中抖動(dòng)、損耗電機(jī)等。此外,TMC4361A 提供 SPI 和 Step/Dir,以及用于閉環(huán)操作的編碼器接口。ChopSync(一種斬波模式),解決步進(jìn)伺服低速運(yùn)動(dòng)的低頻振動(dòng)的問(wèn)題。
Trinamic步進(jìn)電機(jī)閉環(huán)驅(qū)動(dòng)高性價(jià)比方案的選擇:
01
TMC4361+TMC2130/TMC5130(小功率)
02
TMC4361+TMC2160/TMC5160/TMC2240(大功率)
2、伺服、直流無(wú)刷、空心杯及永磁同步電機(jī)方案:TMC4671是完全集成的伺服控制器,可為BLDC/PMSM和2相步進(jìn)電機(jī)驅(qū)動(dòng)以及DC電機(jī)和音圈提供磁場(chǎng)定向控制(FOC),所有控制功能均在硬件中實(shí)現(xiàn)。支持串口或者是CAN通信,通過(guò)TMCL-IDE上位機(jī)軟件進(jìn)行設(shè)定的模式。以力矩值為例,通過(guò)軟件上傳指令,如設(shè)定最小電流/電大電流,電機(jī)工作時(shí)它的電流會(huì)在這最大值與最小值之間,負(fù)載越大電流值越大,當(dāng)我們需要力控制的時(shí)候,我們可以通過(guò)編碼器反饋的值來(lái)進(jìn)行設(shè)定一個(gè)合適的值,當(dāng)外面的力達(dá)到所設(shè)定的值時(shí),就會(huì)觸發(fā)一個(gè)輸出信號(hào)。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2576文章
55031瀏覽量
791252 -
控制器
+關(guān)注
關(guān)注
114文章
17788瀏覽量
193106 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31075瀏覽量
222191 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2184瀏覽量
61272 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
5文章
821瀏覽量
34536
原文標(biāo)題:電動(dòng)夾爪的運(yùn)動(dòng)控制方案
文章出處:【微信號(hào):gh_acd058a2252c,微信公眾號(hào):智聯(lián)微 電機(jī)控制芯片】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄

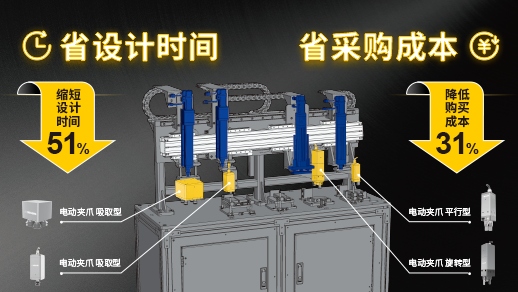
米思米電動(dòng)夾爪新上市,多功能、精簡(jiǎn)結(jié)構(gòu)降成本31%,高效設(shè)計(jì)組裝,一鍵切換程序,提速80%,引領(lǐng)夾爪革新。
怎樣去設(shè)計(jì)一種雙后輪驅(qū)動(dòng)電動(dòng)汽車運(yùn)動(dòng)控制系統(tǒng)?
基于EFG的電動(dòng)夾爪的設(shè)計(jì)介紹
工業(yè)機(jī)器人搭配伺服電動(dòng)夾爪的五大優(yōu)勢(shì)
2013-2022年中國(guó)電動(dòng)夾爪專利申請(qǐng)情況

國(guó)內(nèi)主要電動(dòng)夾爪廠家專利技術(shù)分布情況

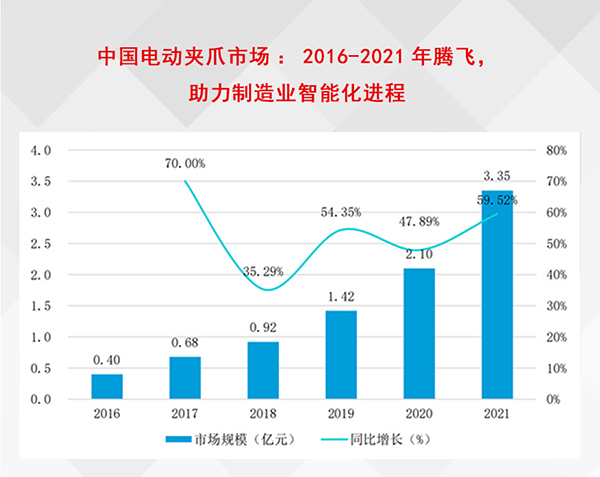
中國(guó)電動(dòng)夾爪市場(chǎng):2016-2021年騰飛,助力制造業(yè)智能化進(jìn)程
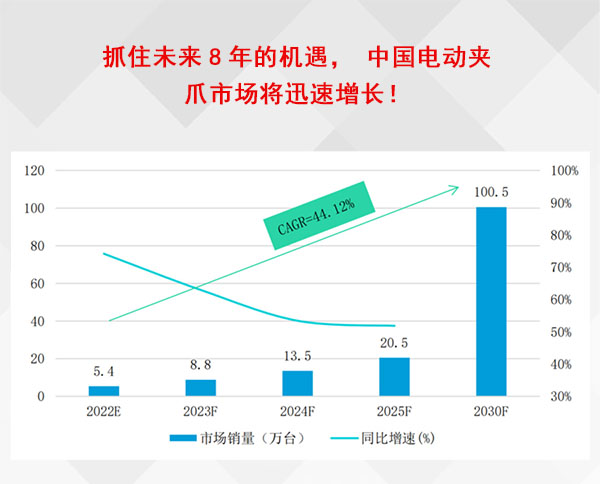
抓住未來(lái)8年的機(jī)遇,中國(guó)電動(dòng)夾爪市場(chǎng)將迅速增長(zhǎng)!
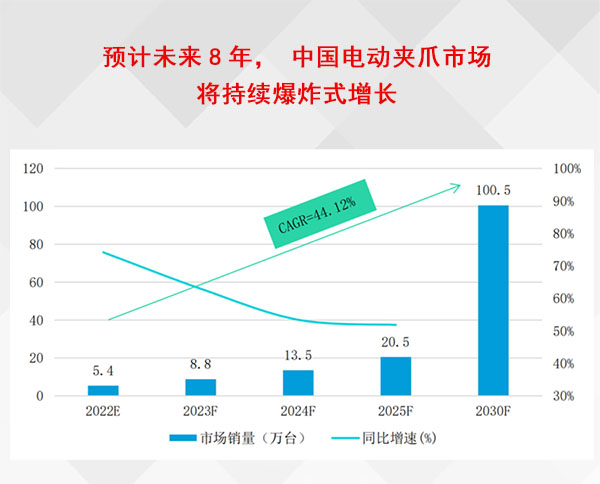
預(yù)計(jì)未來(lái)8年,中國(guó)電動(dòng)夾爪市場(chǎng)將持續(xù)爆炸式增長(zhǎng)
如何進(jìn)行伺服電動(dòng)夾爪的精度標(biāo)定
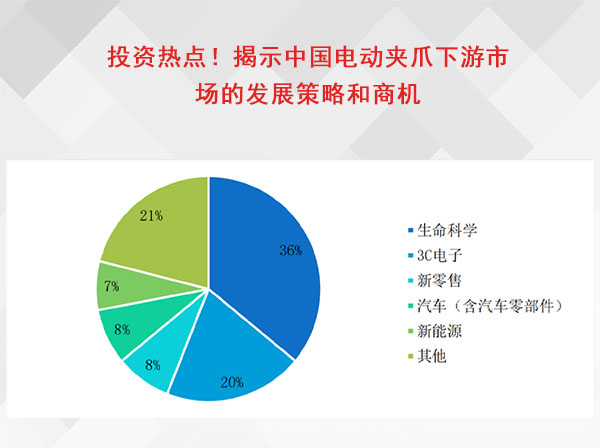
投資熱點(diǎn)!揭示中國(guó)電動(dòng)夾爪下游市場(chǎng)的發(fā)展策略和商機(jī)
英飛凌EiceDRIVER? IC用“芯”驅(qū)動(dòng)新一代電動(dòng)夾爪

電動(dòng)夾爪的運(yùn)動(dòng)控制方案

米思米電動(dòng)夾爪:革新傳統(tǒng),提升效率與穩(wěn)定性
電動(dòng)夾爪PK氣動(dòng)夾爪,優(yōu)勢(shì)何在?



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論