") PLC編程案例之控制機(jī)械手實(shí)現(xiàn)簡(jiǎn)單搬運(yùn)流程
PLC編程案例之控制機(jī)械手實(shí)現(xiàn)簡(jiǎn)單搬運(yùn)流程

很多人希望多分享一些PLC具體應(yīng)用和維護(hù)的案例,滿(mǎn)足大家的要求。今天咱們來(lái)談一談如何利用PLC來(lái)實(shí)現(xiàn)簡(jiǎn)單的搬運(yùn)動(dòng)作,讓機(jī)械為人服務(wù)!
這個(gè)例子應(yīng)用到了順序控制的指令,實(shí)際操作起來(lái)真的是非常方便,程序循環(huán)控制也很流暢!
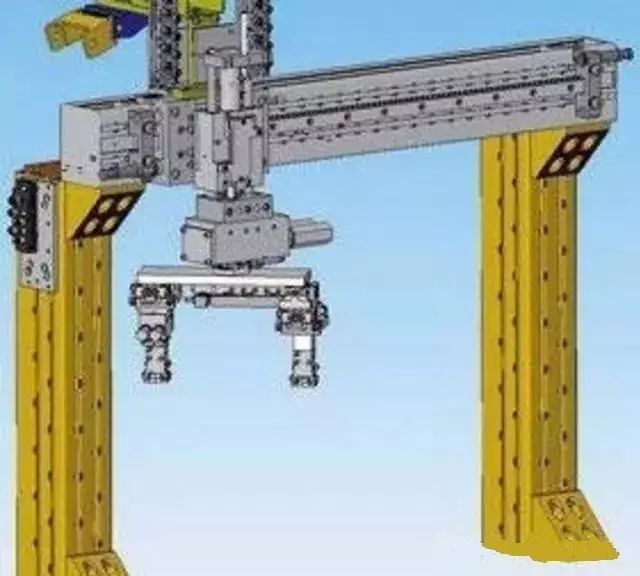
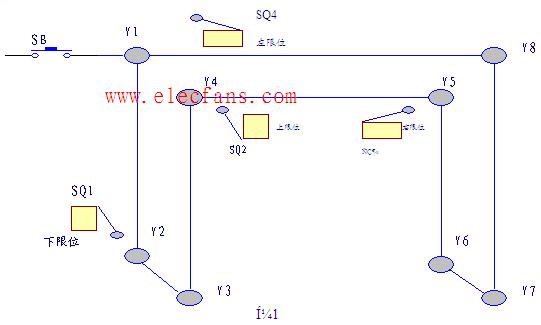
簡(jiǎn)易機(jī)械手結(jié)構(gòu)圖如圖所示
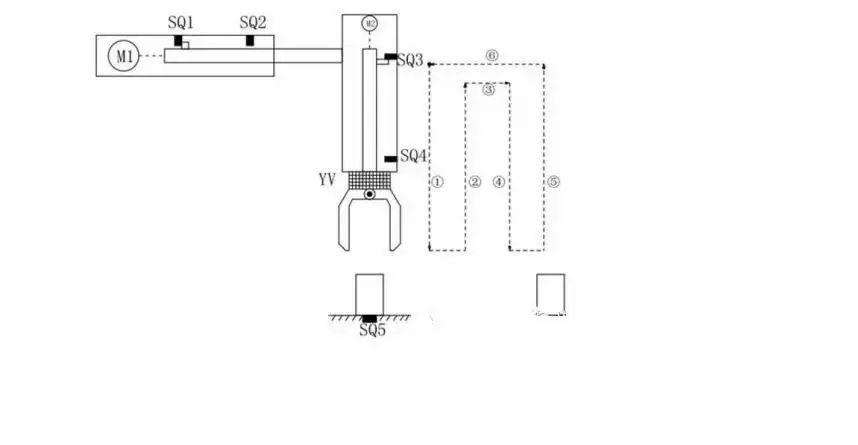
M1為控制機(jī)械手左右移動(dòng)的電動(dòng)機(jī)
M2為控制機(jī)械手上下升降的電動(dòng)機(jī)
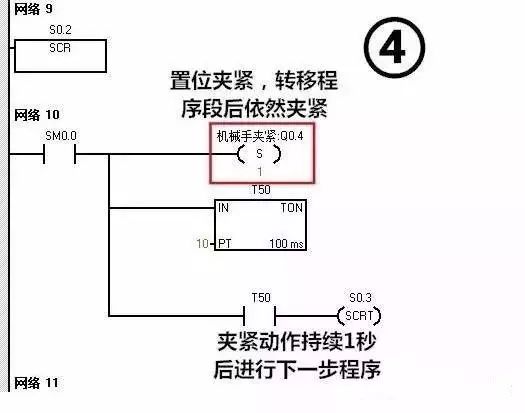
YV線(xiàn)圈用來(lái)控制機(jī)械手夾緊防松
SQ1為左到位檢測(cè)開(kāi)關(guān)
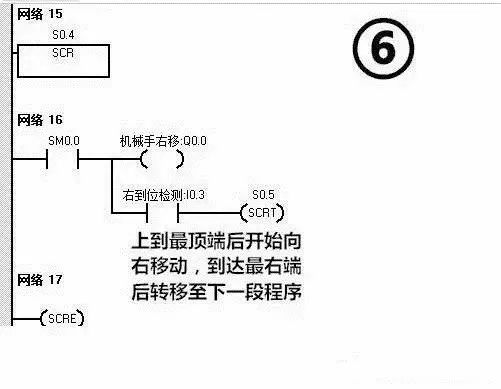
SQ2為右到位檢測(cè)開(kāi)關(guān)
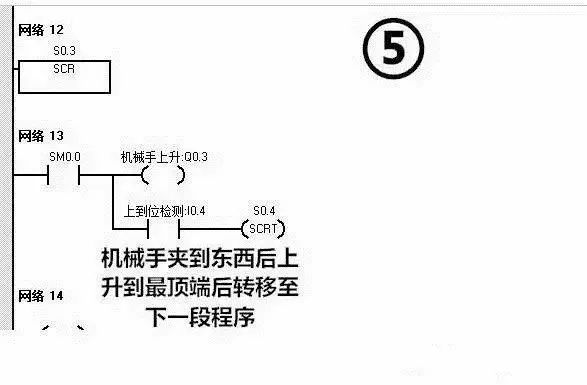
SQ3為上到位檢測(cè)開(kāi)關(guān)
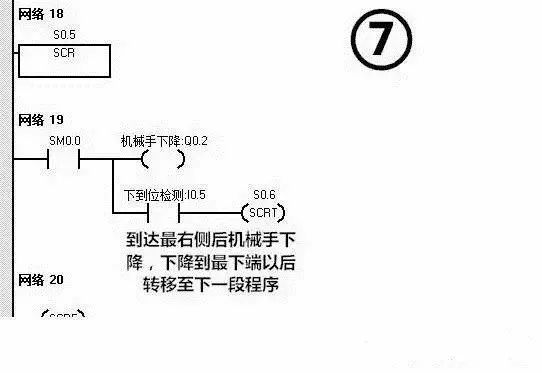
SQ4為下到位檢測(cè)開(kāi)關(guān)
SQ5為工件檢測(cè)開(kāi)關(guān)
簡(jiǎn)易機(jī)械手的控制要求如下:機(jī)械手要將工件從工位A移到工位B 處;
機(jī)械手的初始狀態(tài)(原點(diǎn)條件)是機(jī)械手應(yīng)停在工位A的上方,SQ1、SQ3均閉合;
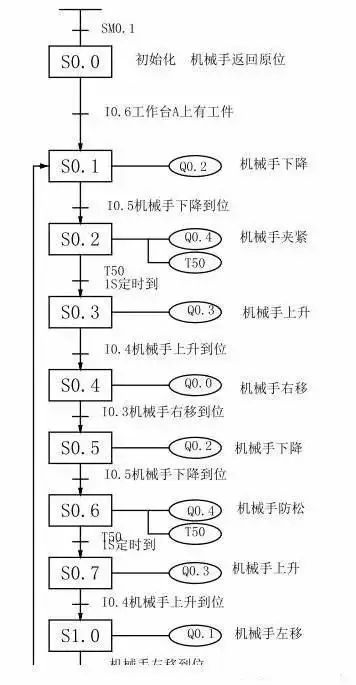
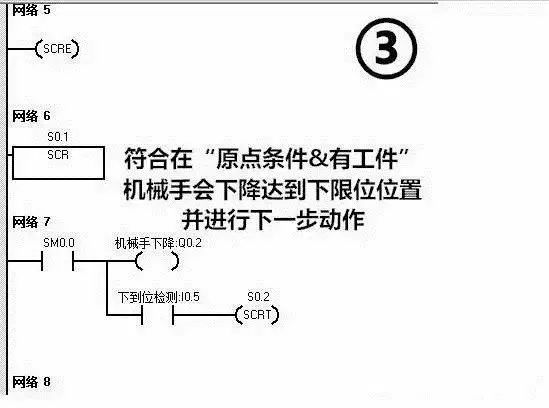
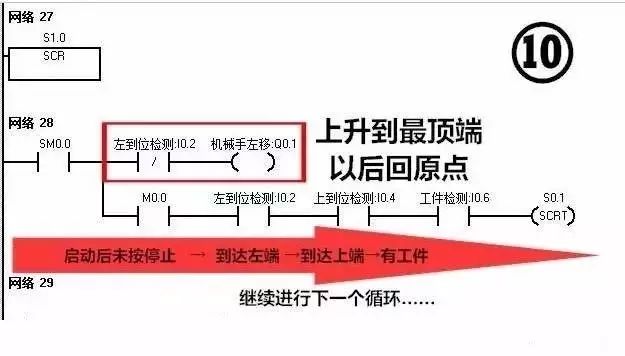
若原點(diǎn)條件滿(mǎn)足且SQ5閉合(工件A處有工件),按下啟動(dòng)按鈕,機(jī)械手按“原點(diǎn)→下降→夾緊→上升→右移→下降→防松→上升→左移→原點(diǎn)”的步驟工作。
動(dòng)作圖編程前理順動(dòng)作如何轉(zhuǎn)移:
定義符號(hào)表:

硬件的接線(xiàn)圖:
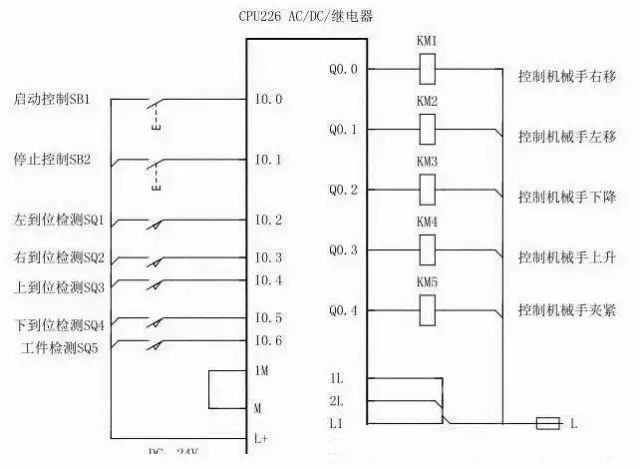
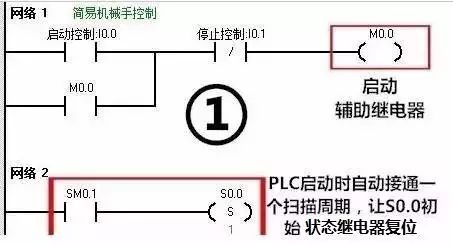
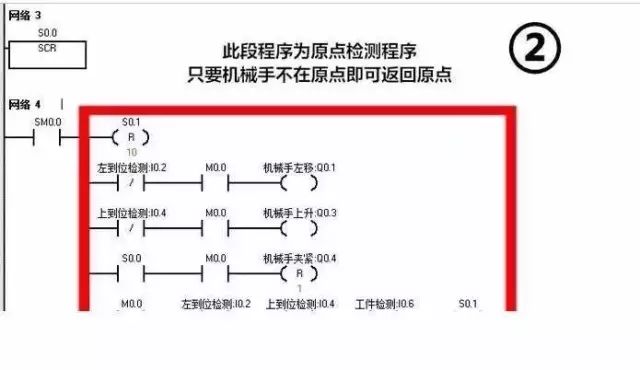
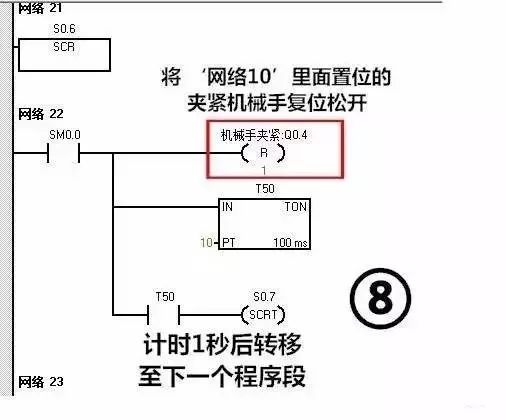
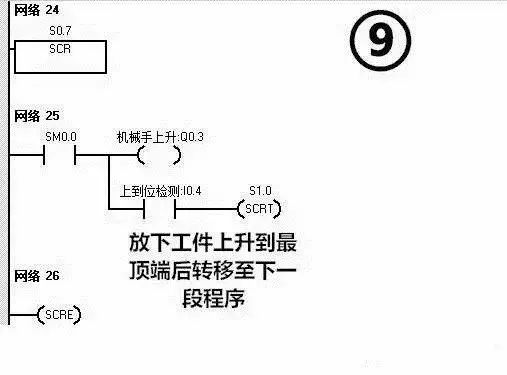
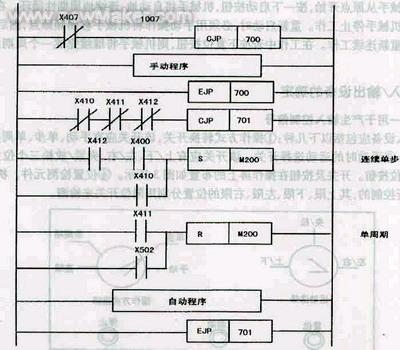
滿(mǎn)足所有動(dòng)作的程序如下:

這么多梯形圖看著真是頭暈?zāi)垦#酉聛?lái)我們一段一段分析分析這個(gè)機(jī)械手是如何工作的,其實(shí)這個(gè)圖沒(méi)有那么多的并行分支,所以轉(zhuǎn)移起來(lái)邏輯非常簡(jiǎn)單!
審核編輯:劉清
-
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4197瀏覽量
101464 -
PLC編程
+關(guān)注
關(guān)注
47文章
248瀏覽量
40617
原文標(biāo)題:PLC編程案例之控制機(jī)械手實(shí)現(xiàn)簡(jiǎn)單搬運(yùn)
文章出處:【微信號(hào):中泰PLC自動(dòng)化教學(xué),微信公眾號(hào):中泰PLC自動(dòng)化教學(xué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)械手 OEM 的應(yīng)用
轉(zhuǎn):分享基于ATmega16的搬運(yùn)機(jī)械手的設(shè)計(jì)與控制方案
使用桁架式機(jī)械手有哪些優(yōu)勢(shì)?
PLC控制機(jī)械手設(shè)計(jì)
機(jī)械手的PLC的自動(dòng)控制
基于PLC控制的注塑機(jī)專(zhuān)用機(jī)械手
PLC在機(jī)械手控制系統(tǒng)上的應(yīng)用
PLC在機(jī)械手步進(jìn)控制中的應(yīng)用

基于PLC的機(jī)械手混合驅(qū)動(dòng)控制

基于PLC的機(jī)械手控制設(shè)計(jì)(畢業(yè)設(shè)計(jì))
三菱PLC(可編程邏輯控制器)編程實(shí)例——機(jī)械手plc程序帶人機(jī)
PLC在機(jī)械手控制系統(tǒng)中的具體應(yīng)用
案例分析,搬運(yùn)機(jī)械手如何選擇電機(jī)?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論