 基于瑞薩RA2E1 MCU芯片的藍牙平衡小車設計
基于瑞薩RA2E1 MCU芯片的藍牙平衡小車設計

本項目由瑞薩RA2E1 MCU芯片作為主控,搭載電源模塊、MPU6050模塊、超聲波模塊、OLED模塊、藍牙模塊、電機模塊等組成的藍牙平衡小車。該小車有平衡模式、跟隨模式和避障模式三種運行模式,項目實現如下:
通過藍牙控制平衡小車運行模式
小車拿起、放下、放倒檢測(控制小車是否運行)
項目功能演示
Part
01硬件介紹
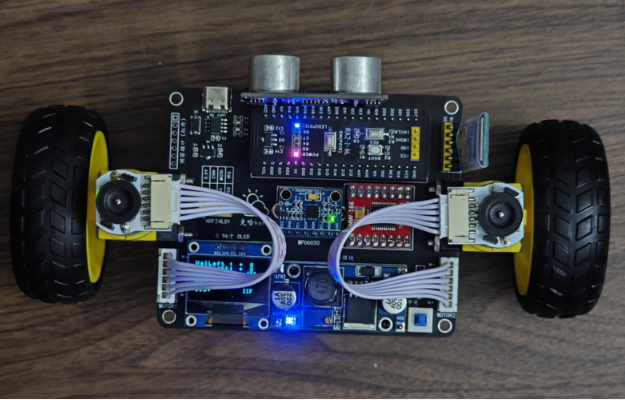
1、平衡小車實物圖
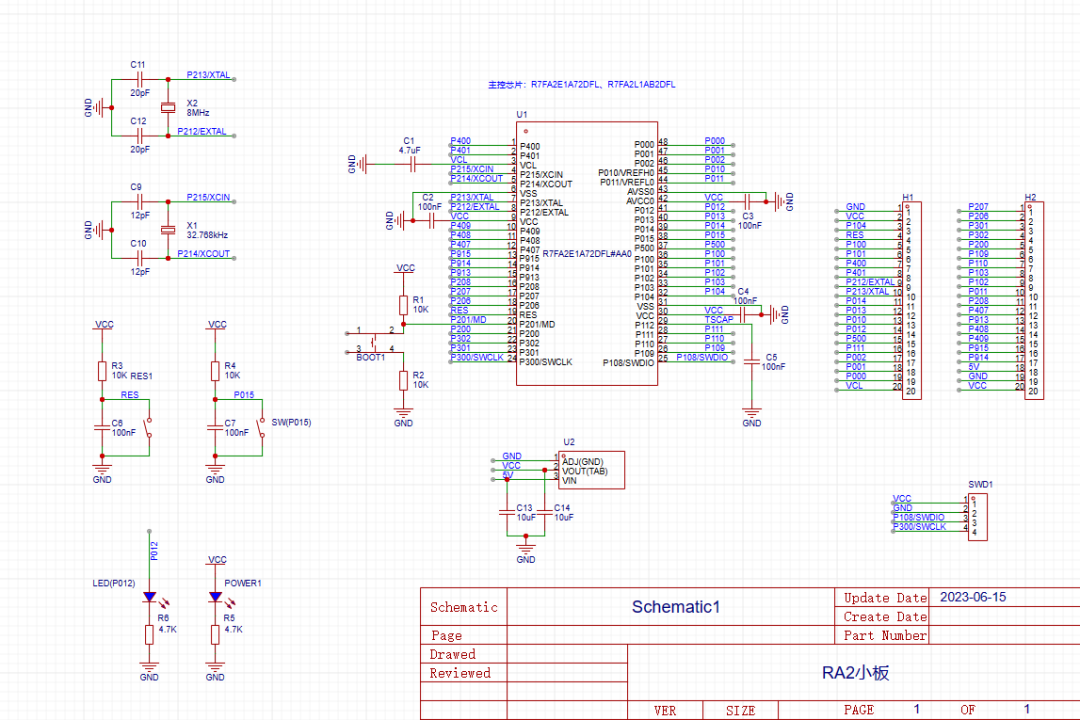
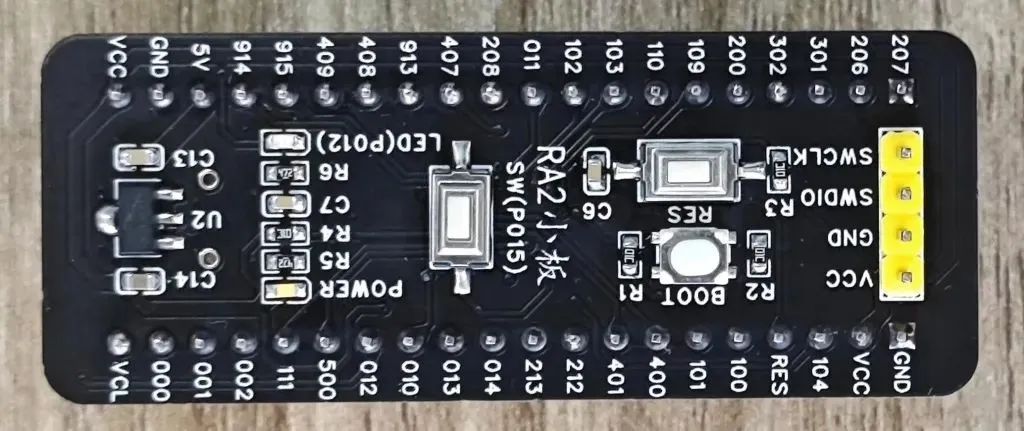
2、RA2小板
由于開發板不易于與底板鏈接,所以自行制作了一塊小板
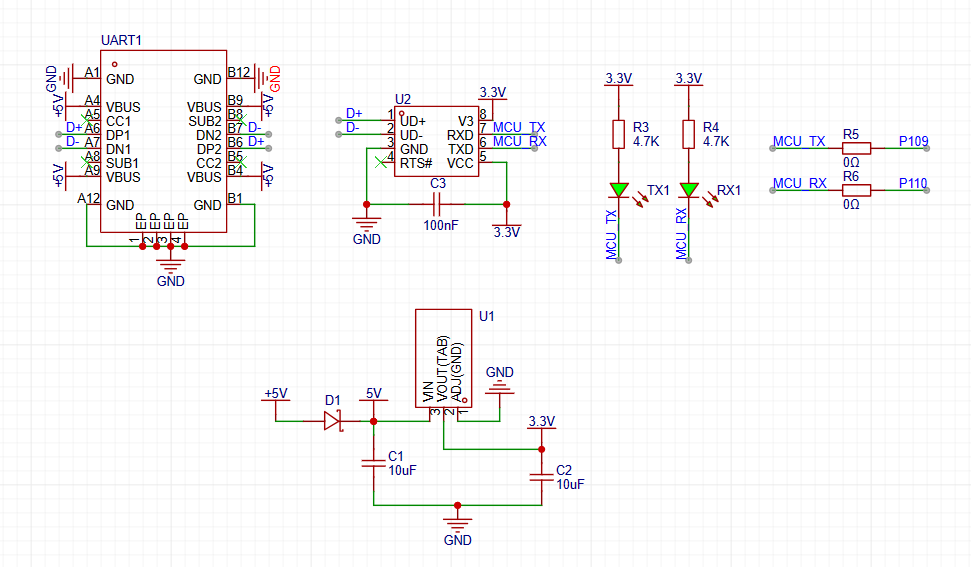
RA2小板原理圖:
RA2小板實物圖:
3、RA平衡小車底板
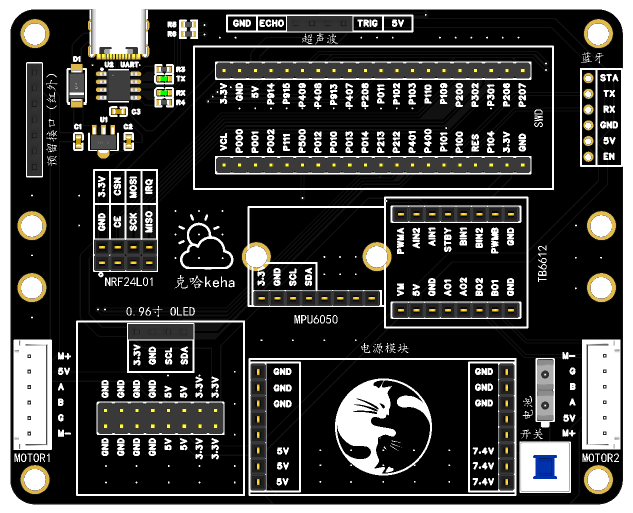
4、平衡小車底板串口模塊
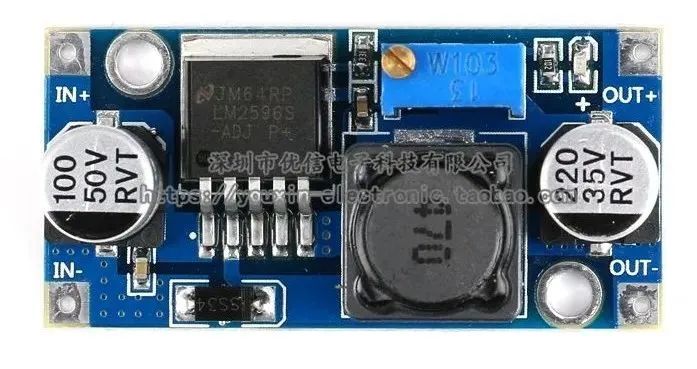
5、電源模塊:LM2596S DC-DC降壓電源模塊
6、MPU6050模塊:MPU-6050模塊三軸加速度+三軸陀螺儀

7、OLED模塊:0.96寸 OLED顯示液晶屏模塊
(注意區分VCC與GND引腳順序,下圖不正確)

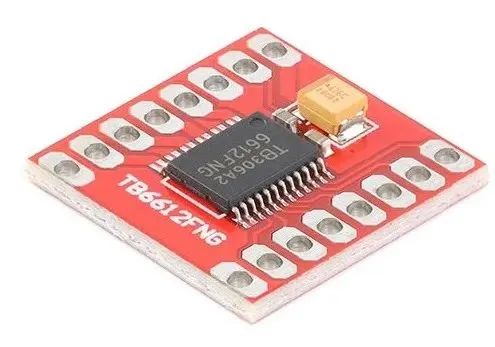
8、電機驅動模塊:TB6612FNG電機驅動模塊
9、藍牙模塊:藍牙3.0模塊 SPP透傳 兼容HC-05/06從機 JDY-31

Part
02系統介紹
瑞薩RA平衡小車系統框架如下圖:
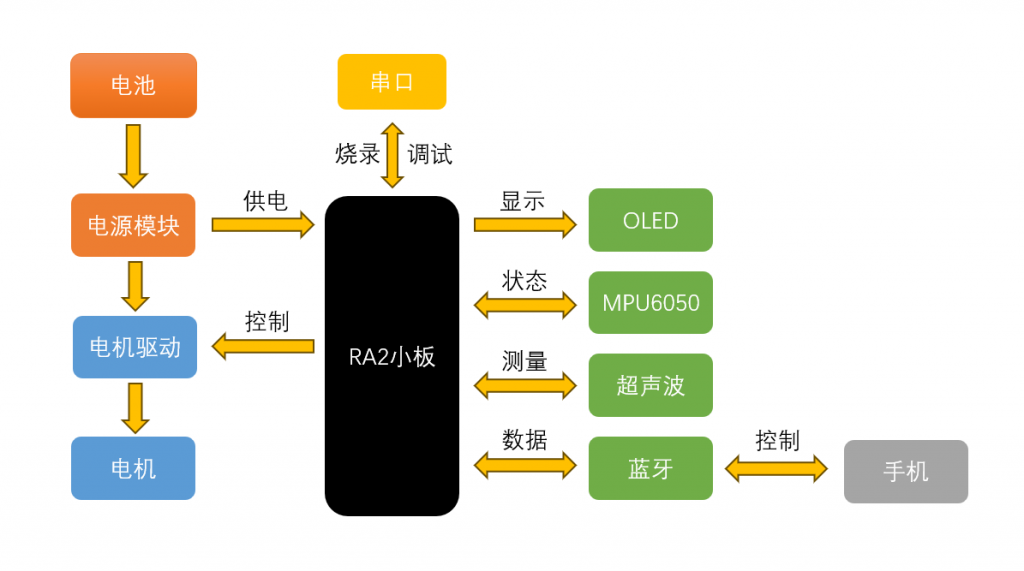
電源:2串電池產生7.2V,輸入到電源模塊產生5V,再通過LDO產生3.3V。
平衡模式:通過MPU6050檢測小車姿態,RA MCU控制電機驅動模塊控制電機運行,并顯示到OLED上。
跟隨模式:小車通過超聲波模塊檢測距離,在一定距離內開啟跟蹤。
避障模式:小車直行,通過超聲波模塊判斷前方是否存在障礙物,若遇到障礙物將轉彎。
藍牙:手機通過與藍牙模塊鏈接,控制小車運行模式,并可對小車進行控制。

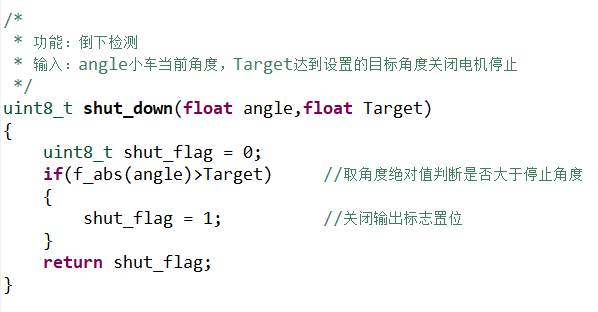
平衡小車倒下檢測:當小車倒下(到達一定角度),停止電機
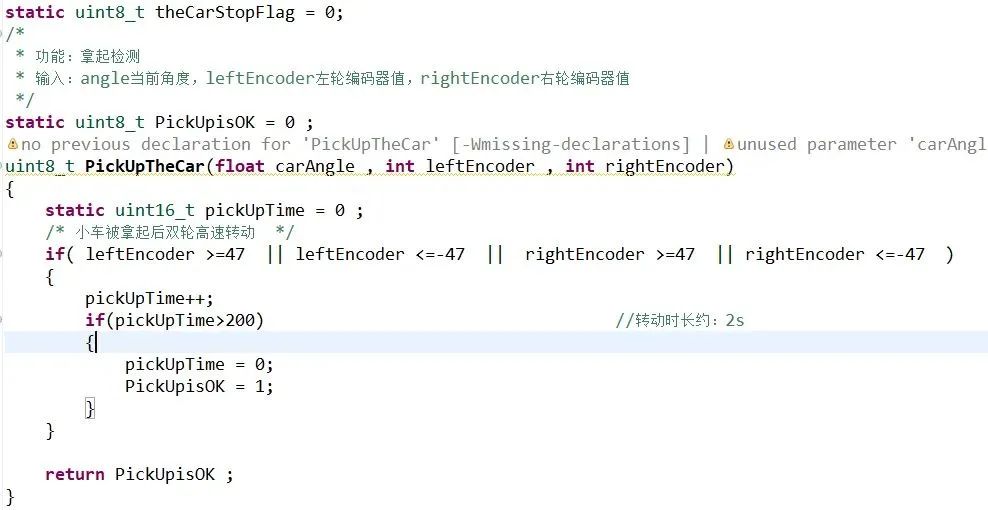
平衡小車拿起檢測:當小車被拿起來(輪子高速轉動一定時間),停止電機
平衡小車放下檢測:當小車重新被放下一定時間(輪子沒有轉動并且角度小于一定范圍),重新進入平衡模式

-
mcu
+關注
關注
147文章
18924瀏覽量
398002 -
藍牙
+關注
關注
119文章
6312瀏覽量
178688 -
瑞薩
+關注
關注
37文章
22481瀏覽量
90852 -
平衡小車
+關注
關注
1文章
39瀏覽量
12953 -
type-c
+關注
關注
557文章
2029瀏覽量
276951
發布評論請先 登錄
基于瑞薩RA2E1 MCU的LCR數字電橋項目介紹

【RA-Eco-RA2E1-V1.0開發板試用】概覽、環境搭建與TTL串口燒錄點燈
瑞薩FPB-RA0E2開發板的批量加載例程

瑞薩電子RA系列MCU 2025年新品回顧

【RA-Eco-RA2E1-V1.0開發板試用】編寫代碼使雙LED燈閃爍
RA MCU眾測寶典 | IIC之【RA2E1】IIC通信的OLED顯示
【瑞薩RA6E2】瑞薩E2S軟件安裝過程,等待過程玩下97_e2 studio_ZGZZ
【瑞薩RA6E2】開箱測試報告_ZGZZ
【瑞薩RA6E2】3.測試RA6E2芯片溫度
瑞薩RA家族RA4C1低功耗MCU發布


【瑞薩RA2L1入門學習】+開箱評測
基于瑞薩RA8單片機的智能小車項目方案 附源代碼




 工商網監
工商網監
評論