 四元數在工業機器人編程操作中的應用
四元數在工業機器人編程操作中的應用

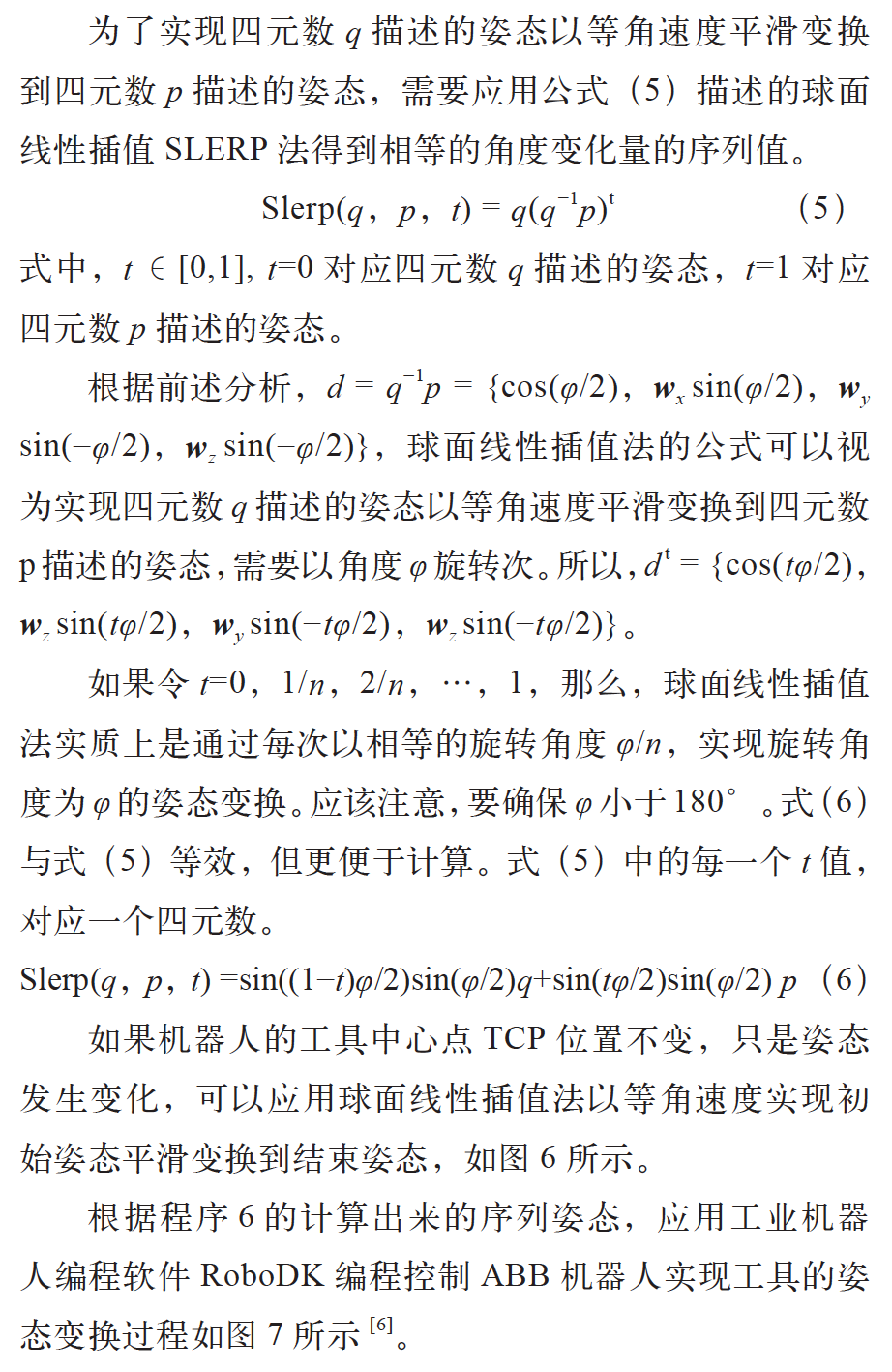
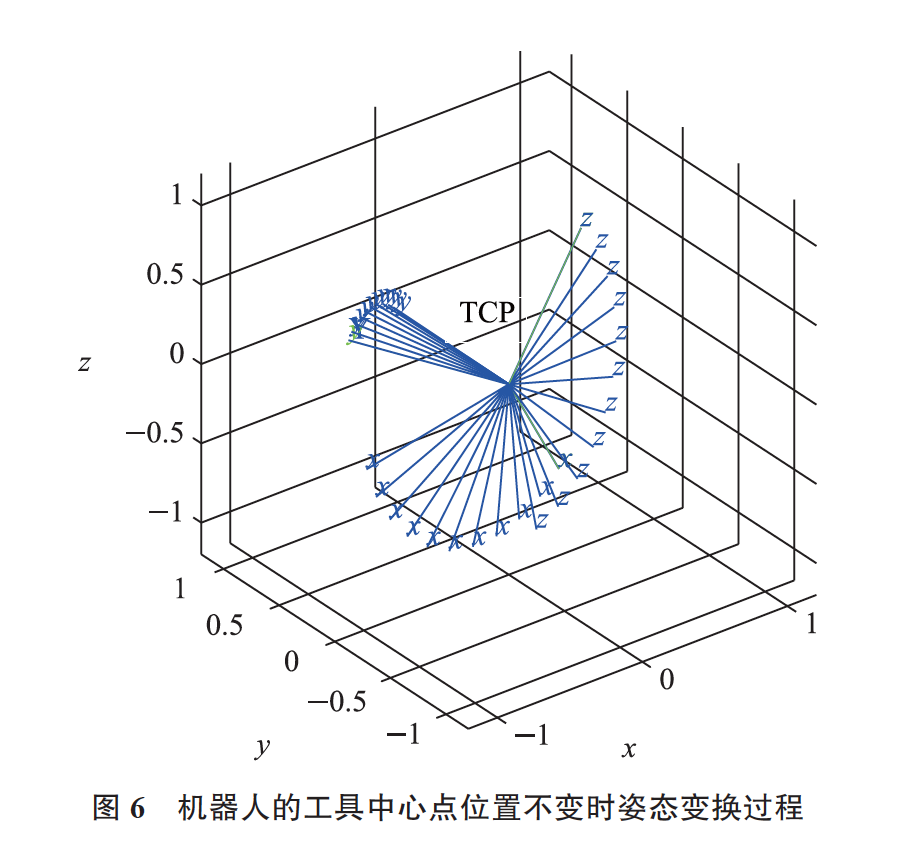
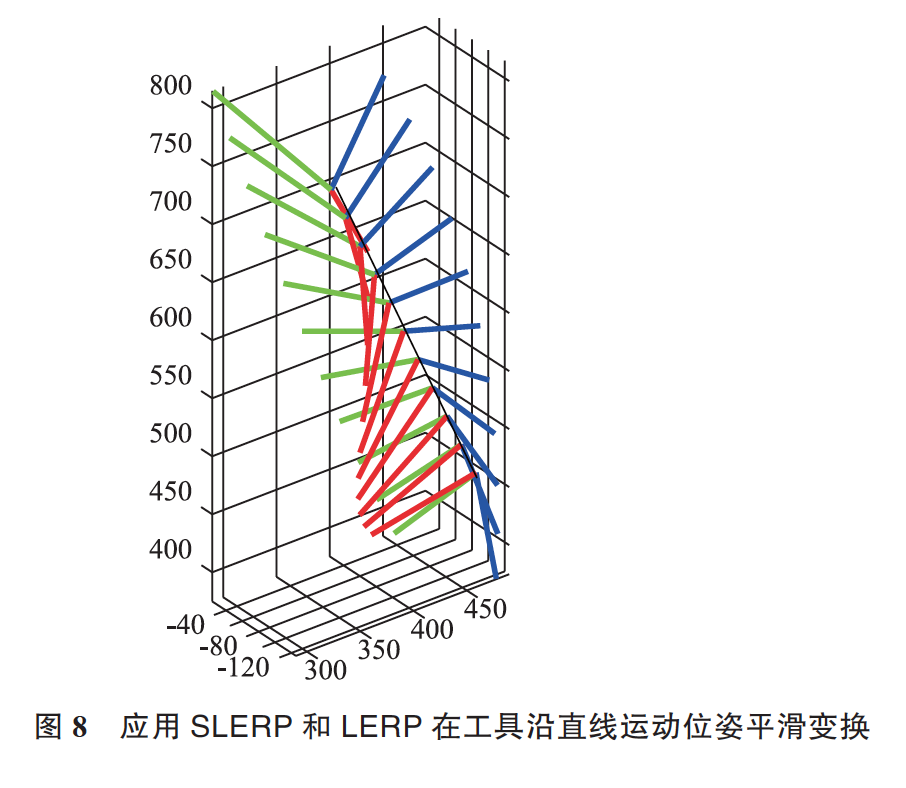
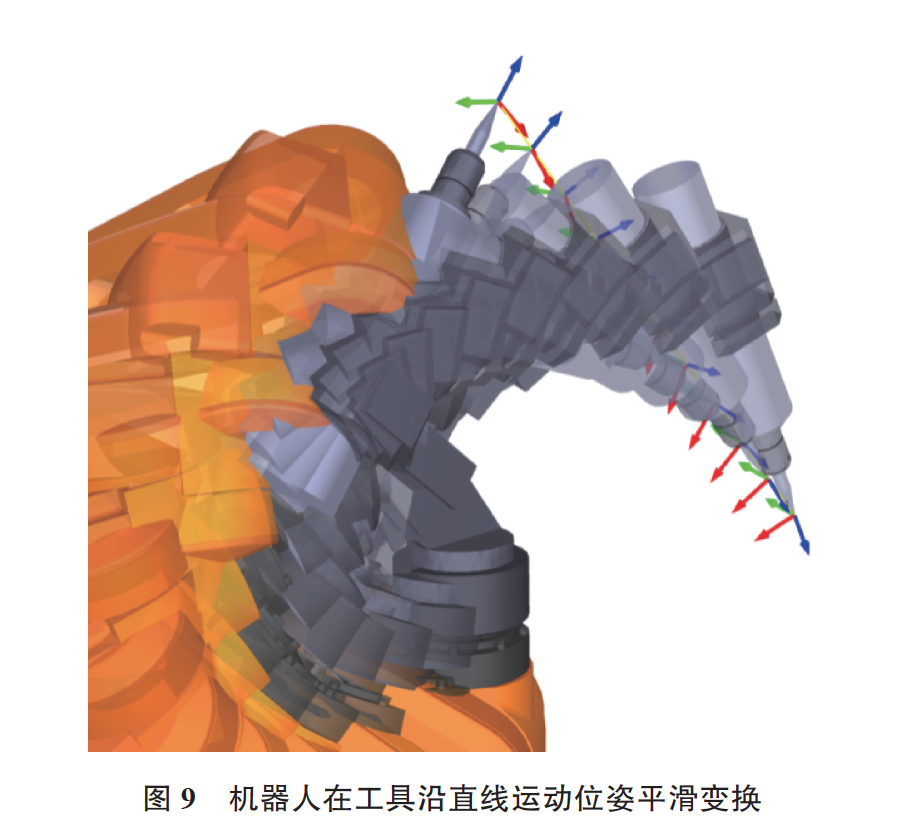
姿態規劃在機械臂控制中占有重要的地位,在編程操作時需要應用姿態變換平滑性的插值算法確保機械臂工具動作的柔和度。首先分析四元數法用作姿態描述和變換的數學基礎,然后應用四元數姿態插補算法SLERP 編程計算工具姿態變換的旋轉角度,用于準確地檢測工具角位移的精確度和重復精度,最后引入實例編程說明如何應用四元數姿態插補算法SLERP 和LERP 實現機器人工具姿態的平滑變換。
01
姿態規劃在機械臂控制中占有重要的地位,在編程操作時需要應用姿態變換平滑性的插值算法確保機械臂工具動作的柔和度。首先分析四元數法用作姿態描述和變換的數學基礎,然后應用四元數姿態插補算法SLERP 編程計算工具姿態變換的旋轉角度,用于準確地檢測工具角位移的精確度和重復精度,最后引入實例編程說明如何應用四元數姿態插補算法SLERP 和LERP 實現機器人工具姿態的平滑變換。
02
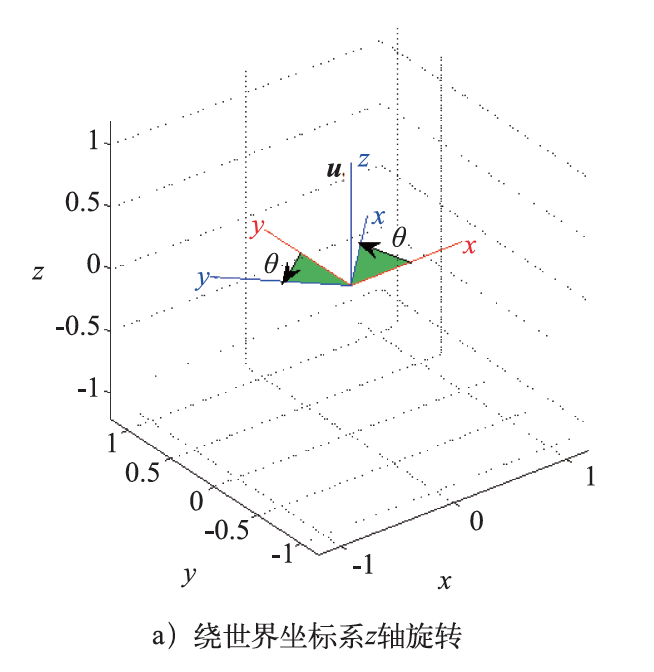
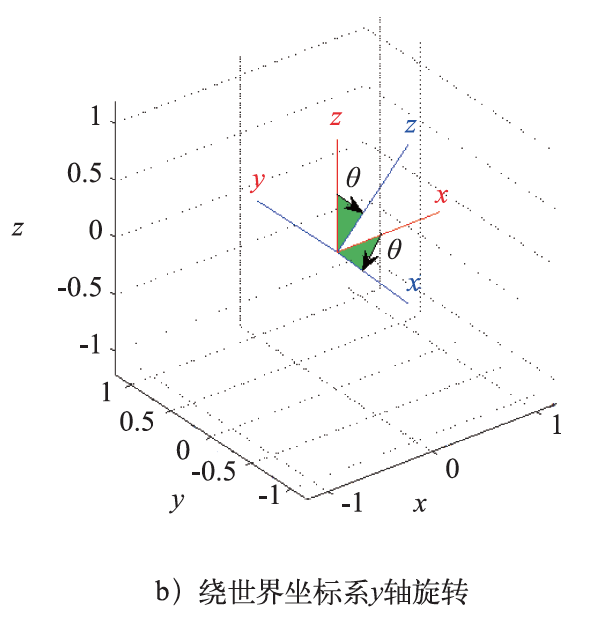
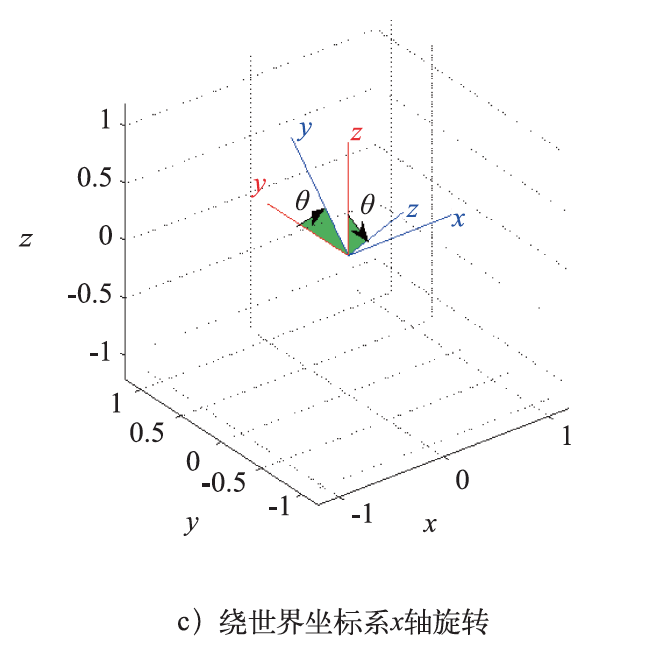
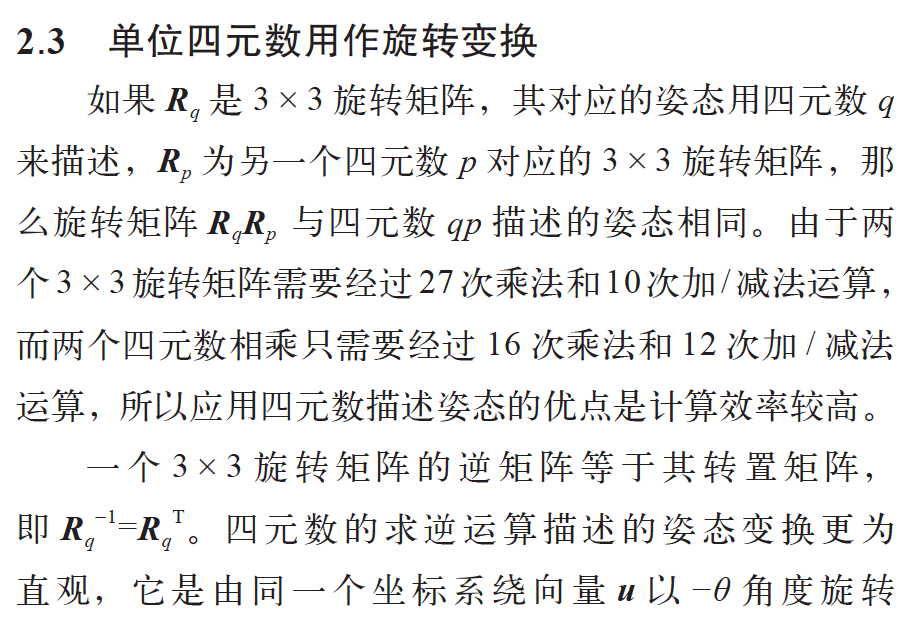
四元數用作姿態描述和旋轉變換




03
應用四元數檢測工具的角位移
04
結束語
審核編輯:劉清
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
工業機器人
+關注
關注
91文章
3533瀏覽量
98163 -
插補算法
+關注
關注
1文章
6瀏覽量
8462
原文標題:【主題策劃】四元數在工業機器人編程操作中的應用
文章出處:【微信號:CADCAM_beijing,微信公眾號:智能制造IMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
[轉帖]工業機器人的基礎知識
的長時間作業,或是危險、惡劣環境下的作業,例如在沖壓、壓力鑄造、熱處理、焊接、涂裝、塑料制品成形、機械加工和簡單裝配等工序上,以及在原子能工業等部門中,完成對人體有害物料的搬運或工藝操作
發表于 05-18 22:03
工業機器人的四大核心部件
`工業機器人的核心部件包括機器人本體、減速器、伺服電機、控制系統等四大部分,這4部分分別占總成本的22%、24%、36%、12%。 筆者從中國國際
發表于 02-12 10:17
工業機器人與金屬成形機床集成的四大應用
工業機器人與金屬成形機床集成的四大應用 近年來,隨著我國制造業轉型升級壓力增加和勞動力成本的不斷攀升,越來越多的企業考慮以機器人換人。上海、南京、蕪湖、沈陽、天津、青島、重慶等地已陸續
發表于 12-04 15:01
四元數數控:工業機器人使用機器視覺系統的原因
模式,逐漸向以工業機器人為主導的生產模式轉變。但是,隨著科技的發展和進步,原有單純采用通過示教和預編程來實現自動化工作的機器人產品在柔性生產
發表于 04-29 09:42
FANUC 工業機器人編程與聯網相關資料推薦
工具 當IT 界在大談工業4.0 ,工業物聯網的時候,千萬不要以為傳統的自動控制公司也跟著我們嗨,它們依然非常傳統。拿機器人領域來說,不同的廠家使用不同的
發表于 07-02 07:38
工業機器人仿真與編程
目錄概述行走軸模型拆分行走軸模型導入仿真軟件創建行走軸機械裝置外部軸配置向導插件安裝虛擬機器人系統創建行走軸系統配置機器人安裝到行走軸行走軸運動控制文已經首發在個人微信公眾號:工業機器人
發表于 09-07 08:57



 工商網監
工商網監
評論