 EPSON愛普生高精度慣性導航模塊賦能無人割草機新賽道
EPSON愛普生高精度慣性導航模塊賦能無人割草機新賽道

對于海外的消費者來說,家庭割草服務一直是一個難題。無人自動割草機很好地解決了這個痛點。但是無人割草機在工作時由于信號丟失造成的路徑混亂一直困擾著生產商們。那么愛普生的陀螺儀產品是如何解決這個痛點的呢?
無人割草機概念圖
目前中國割草機制造商大多在采用厘米級GPS/北斗開發新的規劃式割草機器人,厘米級GPS/北斗由于不需要大量布設信號設備以及精度足夠高等優勢,非常適合于家用割草機器人的定位應用,而且隨著競爭的白熱化,RTK模塊的價格也在不斷下降。
在實際應用中,由于家庭環境的復雜因素,如家中的樹木遮擋以及半墻的遮擋等因素的干擾,RTK定位經常會出現丟失信號的問題,而且家用割草機器人一般移動速度比較慢,大約為30cm/s, 所以重新找回信號可能需要較長的時間,如何在丟失信號的情況下保持割草機器人正常工作成為每個制造商急需解決的問題。
目前大家在研究的主要方向為視覺和慣性導航,視覺導航能起到重要的輔助作用,但是視覺導航也存在一定缺陷,包括對光線的依賴,而且在草地場景區別不大的情況下無法清晰的識別。但是慣性導航完全不依賴外部因素,單純依靠內部慣性器件運算就可以得出行駛的軌跡。當然慣性導航也有缺點,如果慣性器件的精度很低,隨時間的增加角度偏移會越來越大。
高精度陀螺儀
慣性導航器件(IMU)根據精度區分為多種規格,低端的IMU主要為陀螺儀芯片,精度一般為DPS(度/秒)級別,芯片級別陀螺儀一般沒有經過溫度補償等校準,在割草機中精度只能保證在幾秒到十幾秒,如果時間稍微長一點就會偏差過大,芯片級別陀螺儀一般用在消費類電子的姿態識別上,如手機、游戲手柄; 中高端IMU主要以模塊形式存在,精度單位一般為DPH(度/小時)幾倍,在制造過程中一般會做溫度補償、正交補償,在割草機工作的場景精度能保證到30分鐘到1個小時。
愛普生針對智能割草機的痛點,聯合第三方研發的SGPM01陀螺儀模塊,應用愛普生的高精度陀螺儀傳感器以及應用高端IMU的生產工藝制造而成。產品考慮到草地的復雜環境對IMU的精度要求以及工業消費電子對低成本的需要,會直接輸出解算后的姿態角和偏航角。在割草機丟失RTK信號30分鐘內,目前在普通草地實測的精度偏差為1小時5度左右*,達到割草機器人行業可接受的水平。
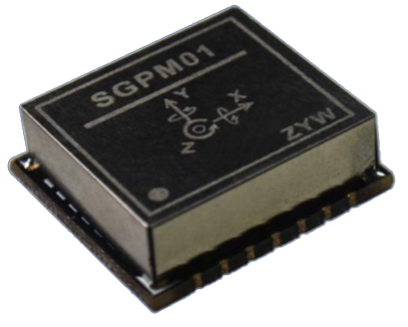
9軸陀螺儀模組
SGPM01是基于高性能陀螺儀傳感器和加速度計,磁力計開發的模組,內置3軸陀螺儀和3軸加速度計傳感器和3軸地磁傳感器。依賴于高精度的傳感器、高性能的處理器和高級的數字信號處理算法,輸出非常穩定的角速度值,加速度值,磁力計和姿態角。模塊可以支持UART,SPI數據通訊,產品總體尺寸為24*22*8mm。
產品特性
▋高精度9軸陀螺儀模組
▋輸出三軸加速度值,三軸角速度值,三軸地磁,姿態角(Pitch,Roll,Yaw),溫度
▋數字通訊接口UART和SPI
▋產品尺寸:24*22*8mm
▋低功耗
規格參數*
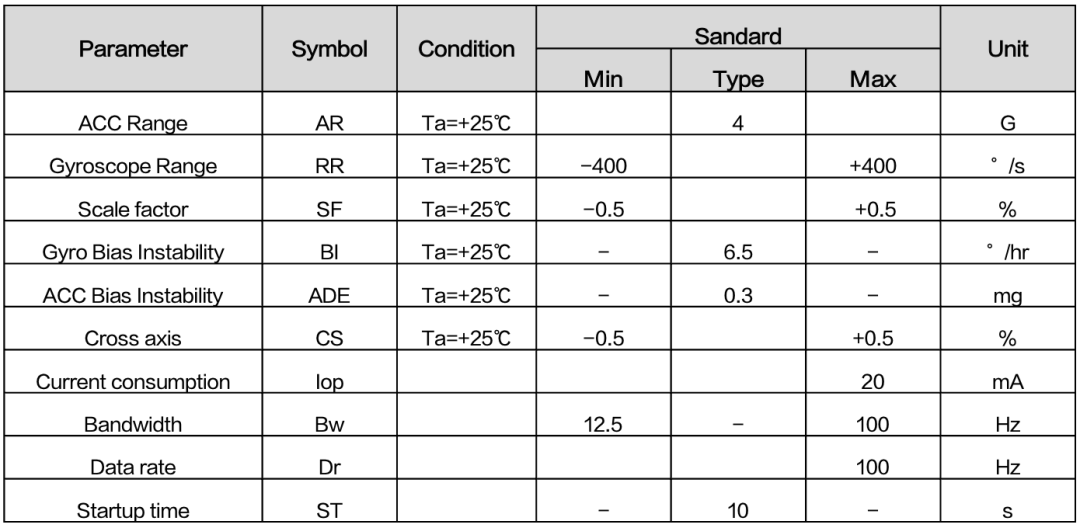
*文中產品數據源自第三方實驗室,因使用和設置的不同,與實際數據可能存在差異。
-
導航
+關注
關注
7文章
577瀏覽量
43915 -
愛普生
+關注
關注
0文章
504瀏覽量
23674 -
割草機器人
+關注
關注
0文章
45瀏覽量
1034
發布評論請先 登錄
激光雷達賦能:解鎖割草機器人全場景工作新可能

NXP MCXA系列MCU在電動割草機中的應用場景和關鍵功能

更少成本,更小體積!利爾達電機方案助力智能割草機量產起飛!

測繪級組合導航如何重新定義大型無人機的高精度導航標準?
從邊界線到 SLAM,割草機器人導航定位的下一個關鍵技術是它?
「快充、安全、小體積」三管齊下:割草機充電痛點一鍋端

單天線也能高精度導航?組合導航如何做到低成本與高性能兼得?

這款MEMS組合導航系統如何做到60秒高精度導航?

廣和通智能割草機解決方案亮相2025德國SPOGA+GAFA展
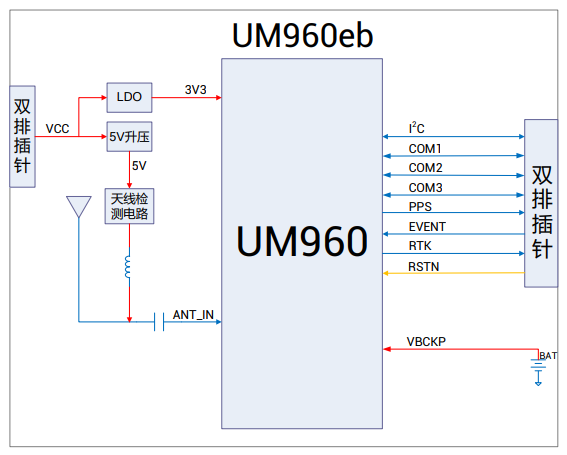
和芯星通高精度RTK模塊UM960評估板的概述和接口說明
成本下降+算法突破,UWB技術是否迎來在割草機器人領域爆發的拐點?

愛普生M-G370PDS慣性測量單元在無人機導航中的應用

智能割草機器人行走輪無感FOC解決方案




 工商網監
工商網監
評論