") KUKA機(jī)器人:Makrostep-Diagnose
KUKA機(jī)器人:Makrostep-Diagnose

MacroStep Diagnosis(宏步驟診斷)窗口顯示了許多有關(guān)宏步驟的信息。
從步驟3開(kāi)始監(jiān)控宏:如果一個(gè)步驟超過(guò)了允許的最大持續(xù)時(shí)間10s,機(jī)器人控制器會(huì)顯示熔化超時(shí)宏步驟。默認(rèn)情況下,步驟1和2不受監(jiān)控,因此可以根據(jù)需要持續(xù)多久。
打開(kāi)MacroStep診斷窗口:
?從診斷主菜單中選擇宏步驟。
?或者,如果顯示超時(shí)宏步驟消息:
按下分析按鈕。
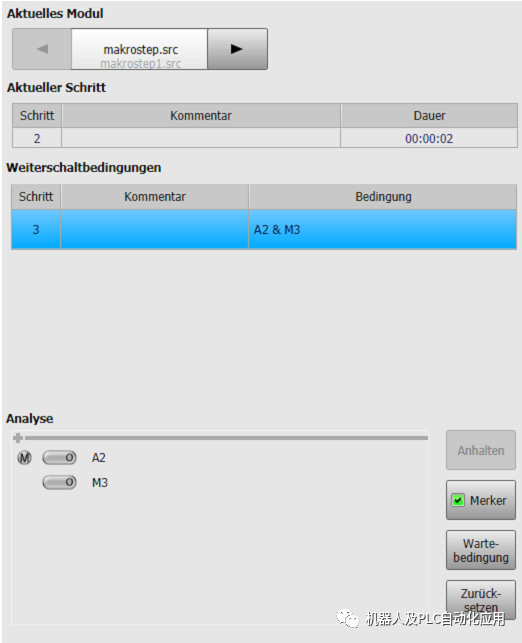
| 當(dāng)前模塊 | 選擇應(yīng)顯示其數(shù)據(jù)的宏 |
| 當(dāng)前步驟 | 此處顯示帶有注釋(如果可用)和持續(xù)時(shí)間的當(dāng)前步驟。 |
| 切換條件 | 下一步顯示在此處。它還顯示了必須滿足哪個(gè)條件才能采取下一步行動(dòng)。 |
分析區(qū)域
| Anhalten | 對(duì)應(yīng)于“分析”窗口中的“暫停”按鈕。 |
| Merker | 對(duì)應(yīng)于“分析”窗口中的復(fù)選框“合并”。 |
| Wartebedingung |
僅在合并待決時(shí)可用。 切換到“分析”窗口。 |
| Zurücksetzen |
可從專家用戶組獲得。 將當(dāng)前模塊下所選模塊的步驟鏈重置為步驟1。 |
“錄制”選項(xiàng)卡
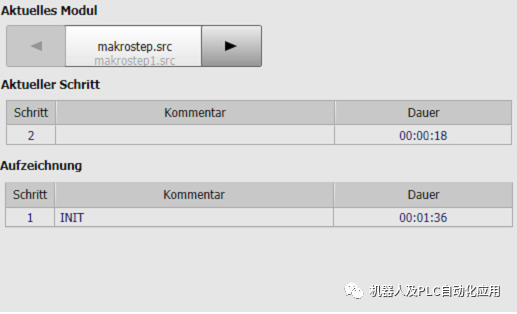
| 當(dāng)前模塊 | 選擇要顯示其數(shù)據(jù)的宏。 |
| 當(dāng)前步驟 | 此處顯示帶有注釋(如果可用)和持續(xù)時(shí)間的當(dāng)前步驟。 |
| Auf zeichnung |
在這里,您可以找到您已采取的步驟的列表。列表中步驟的順序與采取步驟的順序相對(duì)應(yīng)。最后一步在底部。 當(dāng)步驟鏈返回到步驟1時(shí),列表將自動(dòng)重置。 |
審核編輯:黃飛
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
控制器
+關(guān)注
關(guān)注
114文章
17787瀏覽量
193097 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31073瀏覽量
222185 -
KUKA機(jī)器人
+關(guān)注
關(guān)注
4文章
144瀏覽量
10070
原文標(biāo)題:KUKA機(jī)器人:Makrostep-Diagnose
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
KUKA重型機(jī)器人
這個(gè)是KUKA重型機(jī)器人處理和測(cè)量混凝土軌枕的視頻。處理得相當(dāng)精細(xì)。真心值得愛(ài)好機(jī)器者和愛(ài)國(guó)者研究研究。
發(fā)表于 02-03 15:18
求KUKA機(jī)器人控制柜三維模型
尋求KUKA機(jī)器人控制柜三維模型,做方案有時(shí)需要用到,大家誰(shuí)有可以給我發(fā)一份嗎?先謝謝了
發(fā)表于 04-18 16:05
KUKA機(jī)器人問(wèn)題解答
1 開(kāi)機(jī)坐標(biāo)系無(wú)效 世界坐標(biāo)系是以槍頭為基點(diǎn),在這種坐標(biāo)系中機(jī)器人所有的動(dòng)作都是按照以槍頭為頂點(diǎn)來(lái)完成移動(dòng),XYZ方向切割槍方向不改變,如果機(jī)器人在世界坐標(biāo)系中移動(dòng),槍頭也隨著改變方向,那就是我們?cè)?/div>
發(fā)表于 07-15 07:48
庫(kù)卡KUKA機(jī)器人四種啟動(dòng)方式介紹
庫(kù)卡KUKA機(jī)器人四種啟動(dòng)方式1)自動(dòng)運(yùn)行說(shuō)明 庫(kù)卡機(jī)器人處于自動(dòng)運(yùn)行時(shí),先要在手動(dòng)狀態(tài)時(shí)候選擇需要運(yùn)行的程序,然后通過(guò)鑰匙開(kāi)關(guān)切換機(jī)器人到自動(dòng)運(yùn)行狀態(tài),給
發(fā)表于 09-04 15:45
KUKA庫(kù)卡機(jī)器人伺服驅(qū)動(dòng)器相關(guān)型號(hào)舉例
KUKA庫(kù)卡機(jī)器人伺服驅(qū)動(dòng)器(Servo Drive)是KUKA運(yùn)動(dòng)控制的重要組成部分,被普遍應(yīng)用于工業(yè)機(jī)器人及數(shù)控加工中心等自動(dòng)化設(shè)備中。是用來(lái)控制伺服電機(jī)的一種控制器,其作用類似于
發(fā)表于 09-08 16:30
KUKA焊接機(jī)器人伺服電機(jī)常見(jiàn)故障及維修處理
KUKA焊接機(jī)器人伺服電機(jī)常見(jiàn)故障及維修處理1、庫(kù)卡機(jī)器人伺服電機(jī)的基本檢查由于庫(kù)卡機(jī)器人伺服電機(jī)內(nèi)含有精密檢測(cè)器,因此,當(dāng)發(fā)生碰撞、沖擊時(shí)可能會(huì)引起故障,在對(duì)庫(kù)卡
發(fā)表于 09-26 16:51
工業(yè)機(jī)器人組成結(jié)構(gòu)相關(guān)資料分享
工業(yè)機(jī)器人是近兩年機(jī)械行業(yè)最熱的字眼,隨著企業(yè)工業(yè)機(jī)器人的增多,很多機(jī)械工程師對(duì)于工業(yè)機(jī)器人充滿了好奇。作為機(jī)器人四大家族之一的KUKA,已
發(fā)表于 07-05 06:44
庫(kù)卡機(jī)器人MGV電源模塊維修
KUKA庫(kù)卡機(jī)器人MGV電源模塊維修PH1013-2840MGV電源維修 庫(kù)卡電源模塊維修 機(jī)器人電源模塊維修 庫(kù)卡控制器維修 KUKA電源維修KU
發(fā)表于 09-08 07:30
機(jī)器人系統(tǒng)與控制需求簡(jiǎn)介
、KUKA、Yaskawa Motoman、FANUC2.2.1 本體結(jié)構(gòu)本體結(jié)構(gòu)分類:不同機(jī)器人建模控制的本質(zhì)區(qū)別關(guān)節(jié)型機(jī)械臂:串聯(lián)垂直多關(guān)節(jié)6軸機(jī)器人SCARA機(jī)械臂:笛卡爾機(jī)械臂:Delta并聯(lián)機(jī)械臂:雙平行四邊形機(jī)械臂(
發(fā)表于 09-08 07:44
KUKA機(jī)器人伺服驅(qū)動(dòng)模塊維修
KUKA庫(kù)卡C4機(jī)器人驅(qū)動(dòng)器故障報(bào)警維修庫(kù)卡機(jī)器人維修內(nèi)容包括庫(kù)卡機(jī)器人示教器維修,KUKA伺服驅(qū)動(dòng)模塊維修,庫(kù)卡
發(fā)表于 09-17 07:09
沒(méi)有有前輩用LabVIEW控制kuka機(jī)器人c2的經(jīng)驗(yàn)?通訊是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個(gè)怎么用啊?如何和kuka機(jī)器人建立通訊啊?是Tcp接口嗎?
發(fā)表于 10-21 20:59
KUKA機(jī)器人相關(guān)分類及型號(hào)一覽
UKA(庫(kù)卡)是工業(yè)機(jī)器人四大家族品牌之一,也是世界領(lǐng)先的工業(yè)機(jī)器人制造商,在工業(yè)機(jī)器人制造方面有40多年的歷史。 早在1973年,KUKA就研發(fā)出了旗下第一臺(tái)由電機(jī)驅(qū)動(dòng)的6軸工業(yè)
發(fā)表于 09-29 17:11
?0次下載
KUKA機(jī)器人編程說(shuō)明(英文)
電子發(fā)燒友網(wǎng)站提供《KUKA機(jī)器人編程說(shuō)明(英文).pdf》資料免費(fèi)下載
發(fā)表于 03-07 14:05
?0次下載
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 長(zhǎng)沙勒克斯教育咨詢有限公司
湖南省長(zhǎng)沙市開(kāi)福區(qū)月湖街道匍園路20號(hào)聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
評(píng)論