") 基于事件的視覺慣性速度計
基于事件的視覺慣性速度計

0. 筆者個人體會
事件相機(jī)因為比較貴,研究相對小眾,但是在一些領(lǐng)域還是有非常好的效果。事件相機(jī)估計的是像素強度變化(事件)流,可以達(dá)到微秒級的時間分辨率,并且沒有運動模糊。基于事件的速度計主要難點是利用事件生成模型中編碼的光度和幾何約束,實時解決跟蹤和建圖子問題。
今天筆者將為大家分享港科大沈劭劼團(tuán)隊的最新工作,能夠以較低的延遲恢復(fù)度量尺度下的瞬時線速度。
1. 效果展示
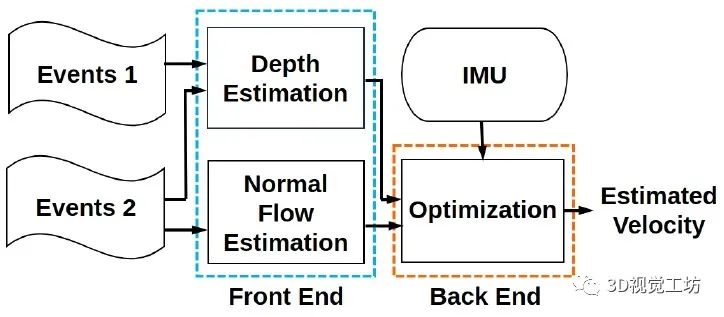
這個速度計框架以事件數(shù)據(jù)和IMU測量作為輸入。圖中所示分別為:(a) 無人機(jī)在狹窄走廊中進(jìn)行攻擊行為。(b) 基于事件的流估計。(c) 相應(yīng)的深度估計。(d) 歸一化瞬時線速度估計結(jié)果。這里也推薦工坊推出的新課程《徹底搞懂視覺-慣性SLAM:VINS-Fusion原理精講與源碼剖析》。
2. 具體原理是什么?
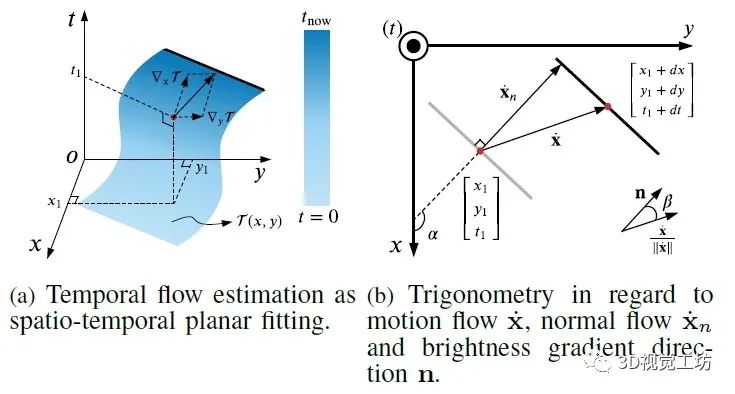
注意這項工作不包括建圖,只有速度計系統(tǒng),使用事件和IMU估計線速度。作者認(rèn)為可以不用估計事件相機(jī)的位置,恢復(fù)瞬時線速度更符合事件相機(jī)的差分工作原理。因此基于事件的速度計采用連續(xù)時間公式,增量地融合來自事件相機(jī)和慣性測量單元的異構(gòu)測量。
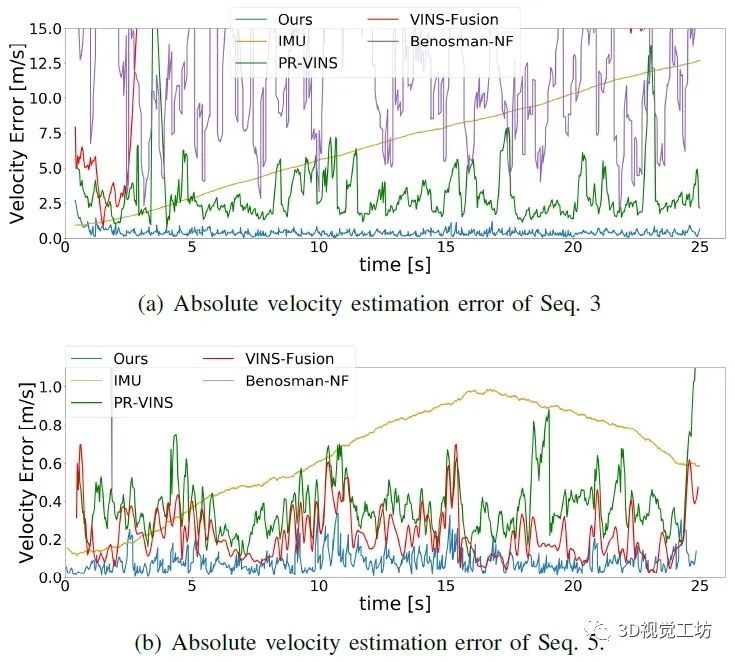
3. 和其他SOTA方法對比如何?
實驗設(shè)備是13700K CPU,實驗結(jié)果證明這個方法能夠以較低的延遲恢復(fù)度量尺度下的瞬時線速度。
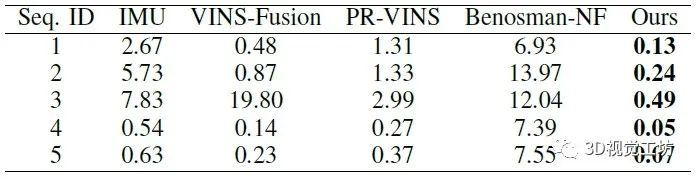
每個序列上的AVE對比結(jié)果。
作者:Xiuyuan Lu, Yi Zhou, Shaojie Shen
審核編輯:黃飛
-
cpu
+關(guān)注
關(guān)注
68文章
11277瀏覽量
224944 -
無人機(jī)
+關(guān)注
關(guān)注
236文章
11298瀏覽量
195622 -
IMU
+關(guān)注
關(guān)注
6文章
416瀏覽量
47871
原文標(biāo)題:港科大沈劭劼團(tuán)隊最新 | 基于事件的視覺慣性速度計
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于加速度計的無陀螺慣性導(dǎo)航系統(tǒng)的研究
2227-050加速度計模塊
1527J-010加速度計
介紹加速度計和陀螺儀的數(shù)學(xué)模型和基本算法
微加速度計的相關(guān)資料分享
基于微加速度計的低功耗無線慣性鼠標(biāo)的設(shè)計Design of
一種提取捷聯(lián)式慣性測量系統(tǒng)中加速度計動態(tài)誤差的方法
基于KXR94加速度計的微型慣性測量裝置設(shè)計
智騰微電子自主研發(fā)SiA200系列MEMS加速度計
傳感器之加速度計在慣性導(dǎo)航中的應(yīng)用
MEMS加速度計的概念,MEMS加速度計的原理
mems加速度計的組成和工作原理
微加速度計的原理與應(yīng)用

三軸加速度計、陀螺儀和磁力計的應(yīng)用原理
MEMS加速度計與石英加速度計的發(fā)展現(xiàn)狀與水平對比




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論