") DM-FMCW車(chē)載雷達(dá)通信一體化系統(tǒng)設(shè)計(jì)
DM-FMCW車(chē)載雷達(dá)通信一體化系統(tǒng)設(shè)計(jì)

結(jié)合常用的車(chē)載調(diào)頻連續(xù)波(FMCW)雷達(dá)和擴(kuò)頻通信技術(shù),針對(duì)通信與目標(biāo)探測(cè)相結(jié)合的綜合波形設(shè)計(jì)、硬件實(shí)現(xiàn)等問(wèn)題,研究了基于直接調(diào)制的調(diào)頻連續(xù)波(DM-FMCW)的一體化系統(tǒng),通過(guò)仿真結(jié)合理論推導(dǎo)驗(yàn)證信號(hào)合成方案的可行性,搭建一體化測(cè)試系統(tǒng)。結(jié)果表明:利用正交相移鍵控(QPSK)調(diào)制通信信號(hào)并不會(huì)影響雷達(dá)性能;一體化信號(hào)的通信誤碼率與QPSK 信號(hào)相同,雷達(dá)速度分辨率為0.1 m/s,距離分辨率為1 m。
0 前言
隨著數(shù)據(jù)時(shí)代的發(fā)展,智能交通及車(chē)聯(lián)網(wǎng)的概念被提出,這要求汽車(chē)兼具通信和目標(biāo)探測(cè)的功能[1]。由于調(diào)頻連續(xù)波(FMCW)信號(hào)具有恒定包絡(luò)、短脈沖周期和高擴(kuò)頻增益等特點(diǎn),因此其具備高距離分辨率、高速度分辨率等優(yōu)點(diǎn),被廣泛應(yīng)用于車(chē)載雷達(dá)系統(tǒng)。以FMCW 為基礎(chǔ)的通信及目標(biāo)探測(cè)設(shè)備具有體積小、便捷程度高和共享頻譜資源等優(yōu)點(diǎn)。
在各種方式下以FMCW 為基礎(chǔ)的雷達(dá)信號(hào)被用于調(diào)制通信信息,楊云飛等[2]針對(duì)連續(xù)相位調(diào)制(CPM)-線性頻率調(diào)制(LFM)波形中各符號(hào)內(nèi)部調(diào)制了通信信息,調(diào)制方式采用CPM,使其對(duì)雷達(dá)性能的影響最低。在調(diào)制的通信信息的影響下會(huì)產(chǎn)生距離旁瓣調(diào)制,并導(dǎo)致波形具有隨機(jī)性,進(jìn)而影響多普勒維的脈沖主旁瓣[3]。為此,還需要增加額外的距離旁瓣來(lái)進(jìn)行抑制處理,以彌補(bǔ)雷達(dá)性能的損耗[4]。劉耀文等[5]提出將最小頻移鍵控(MSK)信號(hào)與LFM 信號(hào)相結(jié)合,將LFM 信號(hào)作為MSK 信號(hào)的載波,得到MSK-LFM 一體化信號(hào),但此方案采用低階調(diào)制,通信速率不高,難以應(yīng)用在實(shí)際通信中。
針對(duì)雷達(dá)與通信共存的情況,本文研究了兩者性能間的相互影響,設(shè)計(jì)并驗(yàn)證了一款易于實(shí)現(xiàn)的車(chē)載一體化系統(tǒng),分別采用π/4 相移的正交相移鍵控(QPSK)來(lái)調(diào)制幀頭信號(hào)和通信信號(hào)。
1 直接調(diào)制的調(diào)頻連續(xù)波(DM-FMCW)信號(hào)模型
所設(shè)計(jì)的一體化信號(hào)以連續(xù)波為基礎(chǔ),將1 幀通信數(shù)據(jù)的長(zhǎng)度與雷達(dá)脈沖重復(fù)時(shí)間所占用的長(zhǎng)度相對(duì)應(yīng),即認(rèn)為一個(gè)脈沖重復(fù)時(shí)間(PRT)內(nèi)所包含的數(shù)據(jù)為1 幀信號(hào),其包含多個(gè)通信符號(hào),利用掃頻余弦(Chirp)信號(hào)承載通信信息,結(jié)合擴(kuò)頻技術(shù)可提高信號(hào)積累的能量,減少噪聲對(duì)信號(hào)的干擾。信號(hào)總體以FMCW 為載波,可將其視為多個(gè)Chirp 信號(hào)的拼接,數(shù)據(jù)幀頭部分采用固定數(shù)量的符號(hào)承擔(dān),其后的符號(hào)可以隨機(jī)調(diào)制通信信息。
作為載波的Chirp 信號(hào)sc(t)表示為:

式中:f0為信號(hào)的中心頻率;k為載波信號(hào)的調(diào)頻斜率,k=B/Tc,B為Chirp 信號(hào)的帶寬,Tc為Chirp 信號(hào)的掃頻時(shí)長(zhǎng);t為時(shí)間,t∈[0,Tc]。
在1 幀信號(hào)中,取5 個(gè)固定符號(hào)置于幀頭,用作信號(hào)同步,并采用π/4 相移的QPSK 對(duì)幀頭信號(hào)進(jìn)行調(diào)制,以確定信號(hào)因信道影響而產(chǎn)生的相位旋轉(zhuǎn)角度。除幀頭外的所有符號(hào)均可用于加載通信信息,筆者采用QPSK 進(jìn)行調(diào)制。采用2 種不同調(diào)制方式可以更好地區(qū)分幀頭和通信信號(hào)。
1 幀發(fā)送信號(hào)s(t)的表達(dá)式如下:
式中:M為用作幀頭的Chirp 信號(hào)個(gè)數(shù);θm為π/4 相移QPSK 調(diào)制的第m個(gè)幀頭符號(hào)的信號(hào)相位;N為隨機(jī)調(diào)制的通信總符號(hào)數(shù);φn為QPSK 調(diào)制的第n個(gè)通信信號(hào)相位。
2 一體化信號(hào)的通信解調(diào)
一體化信號(hào)發(fā)送后,經(jīng)隨機(jī)信道的二次調(diào)制到達(dá)通信接收機(jī),接收信號(hào)rc(t)被噪聲干擾,表示為:

式中:n(t)為高斯白噪聲。
采用與載波斜率相同的Chirp 信號(hào)對(duì)rc(t)進(jìn)行脈沖壓縮處理。為便于理解,對(duì)1 幀信號(hào)中的第1 個(gè)符號(hào)進(jìn)行處理,即m=0,故第1 個(gè)處理后的信號(hào)r0(t)表示為:
由式(4)可知,經(jīng)脈沖壓縮處理后的輸出信號(hào)包絡(luò)近似為sinc 函數(shù),其峰值點(diǎn)相位θ0即為Chirp 信號(hào)承載的通信信息。
觀察脈沖壓縮后信號(hào)的頻域并提取出頻譜峰值點(diǎn)上信號(hào)的相位,將其與幀頭固定相位信息進(jìn)行對(duì)比,可完成幀同步并確定相位偏移。完成幀同步后,對(duì)通信部分信號(hào)進(jìn)行解調(diào),并補(bǔ)償相位偏移,可得到發(fā)送的通信信息。
3 一體化回波信號(hào)處理
假設(shè)在t=0 時(shí),目標(biāo)與雷達(dá)之間的距離為R,移動(dòng)目標(biāo)以速度v進(jìn)行勻速?gòu)较蜻\(yùn)動(dòng),τ為1 幀內(nèi)信號(hào)經(jīng)過(guò)的時(shí)延,此時(shí)1 幀目標(biāo)回波信號(hào)rr(t-τ)可以表示為:
由于雷達(dá)信號(hào)接收機(jī)收發(fā)一體,因此無(wú)需對(duì)通信信號(hào)進(jìn)行解調(diào),可直接采用去斜率(dechirp)的方式去除一體化回波信號(hào)中的通信部分,為便于理解,對(duì)接收信號(hào)第i幀回波的第1 個(gè)符號(hào)rr(t-iTr-τ)進(jìn)行處理,表示為:
式中:I為一次相干處理間隔(CPI)內(nèi)的總幀數(shù);Tr為雷達(dá)回波信號(hào)的累積時(shí)長(zhǎng);c為光速。
對(duì)雷達(dá)回波信號(hào)進(jìn)行去通信處理,可得:
式中:xir(t)為每1 幀的回波信號(hào)。
將得到的xir(t)重排成快-慢時(shí)間維的回波矩陣,并對(duì)其快時(shí)間維進(jìn)行脈沖壓縮,將脈沖壓縮后的回波矩陣進(jìn)行相干積累,得到目標(biāo)的速度信息。
4 試驗(yàn)測(cè)試
4.1 仿真試驗(yàn)
所設(shè)計(jì)的一體化波形仿真的信號(hào)帶寬為150 MHz,載波頻率為2.4 GHz,雷達(dá)積累脈沖數(shù)為300。目標(biāo)距離雷達(dá)17 m,且以7 m/s 的速度與雷達(dá)相向而行。在不同進(jìn)制數(shù)(M)和多普勒頻移(D)的情況下接收端解調(diào)隨機(jī)產(chǎn)生的通信信息,誤碼率曲線對(duì)比如圖1 所示。從圖1 可以看出:改變進(jìn)制數(shù)會(huì)影響信號(hào)的誤碼率,在不改變多普勒頻移的情況下,進(jìn)制數(shù)越高,誤碼率性能越差;對(duì)于相同進(jìn)制數(shù)的信號(hào),解調(diào)后的誤碼率性能受頻移的影響,頻移越大,誤碼率性能越差。
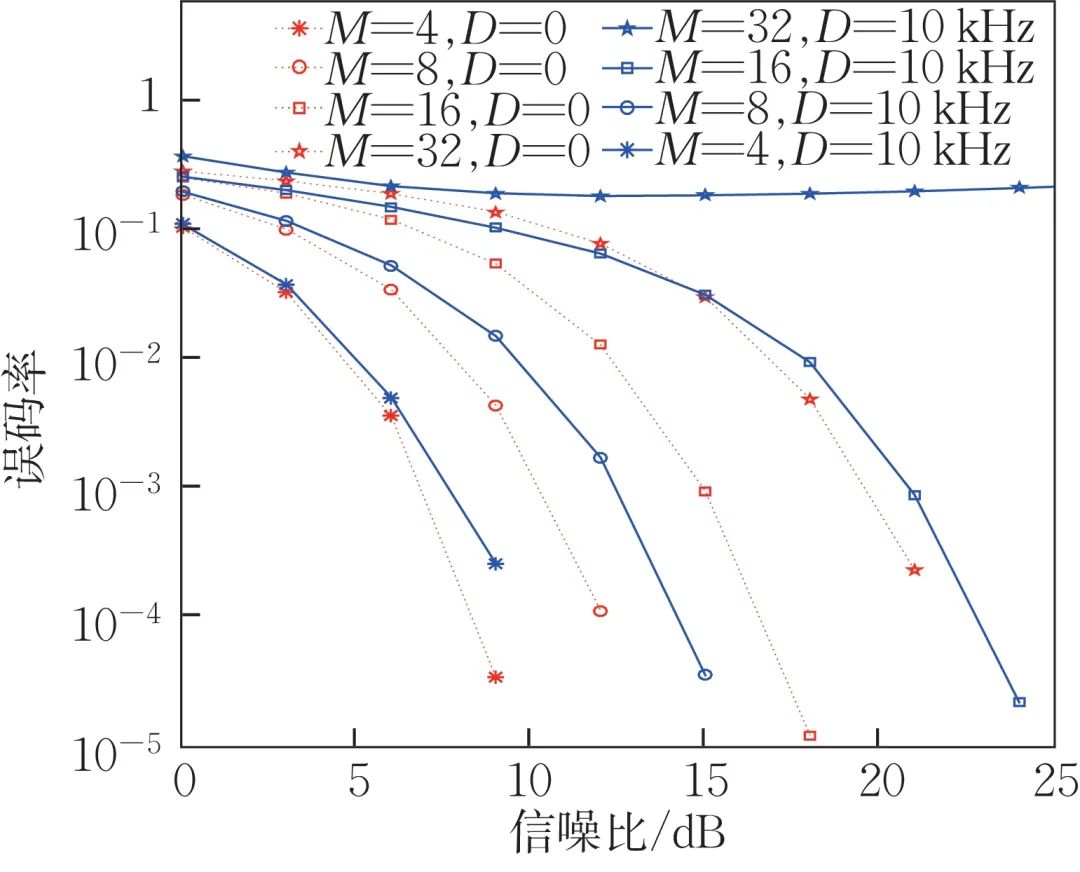
圖1 不同信噪比下的誤碼率
對(duì)回波信號(hào)的快時(shí)間維進(jìn)行脈沖壓縮處理后可以得到目標(biāo)的距離信息,再對(duì)快-慢時(shí)間維回波矩陣進(jìn)行動(dòng)目標(biāo)檢測(cè)(MTD),可以得到目標(biāo)的速度信息。圖2為經(jīng)MTD 后的距離-多普勒?qǐng)D的速度切面圖。
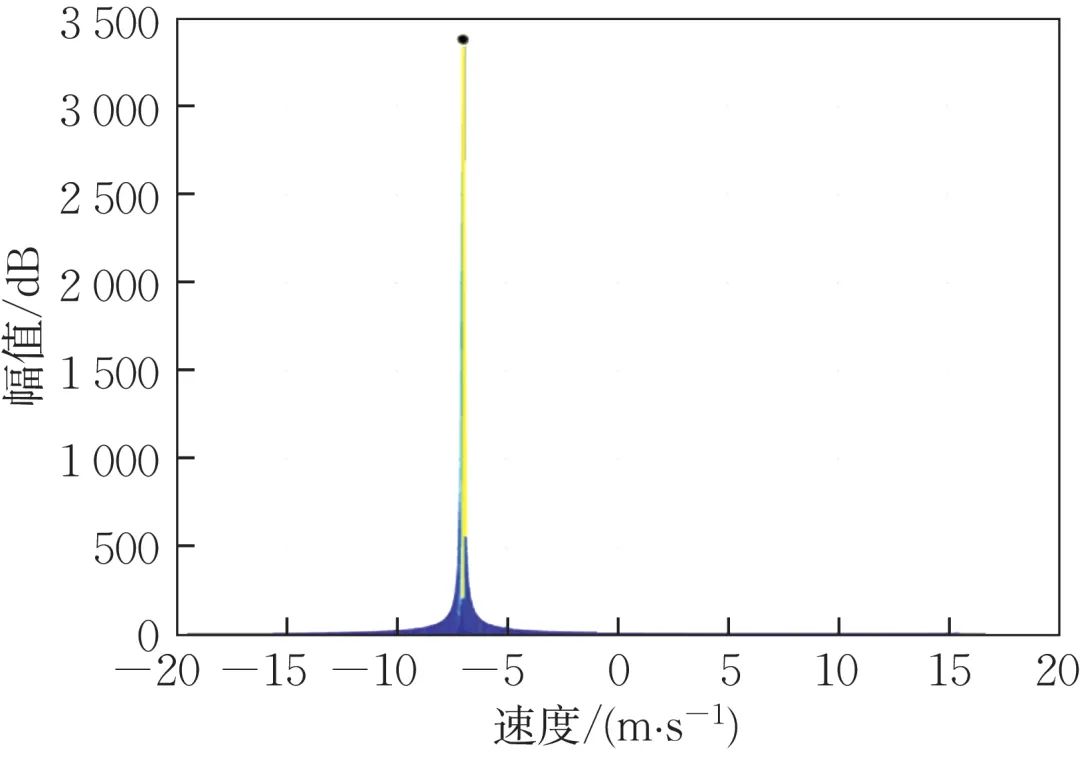
圖2 MTD 速度切面圖
4.2 實(shí)測(cè)結(jié)果分析
圖3為實(shí)測(cè)數(shù)據(jù)的解調(diào)結(jié)果,其中第3 列數(shù)據(jù)為隨機(jī)調(diào)制的通信信息所對(duì)應(yīng)的解調(diào)結(jié)果,將其繪制成星座圖后發(fā)現(xiàn),所有數(shù)據(jù)分布在星座點(diǎn)附近,說(shuō)明解調(diào)效果良好。
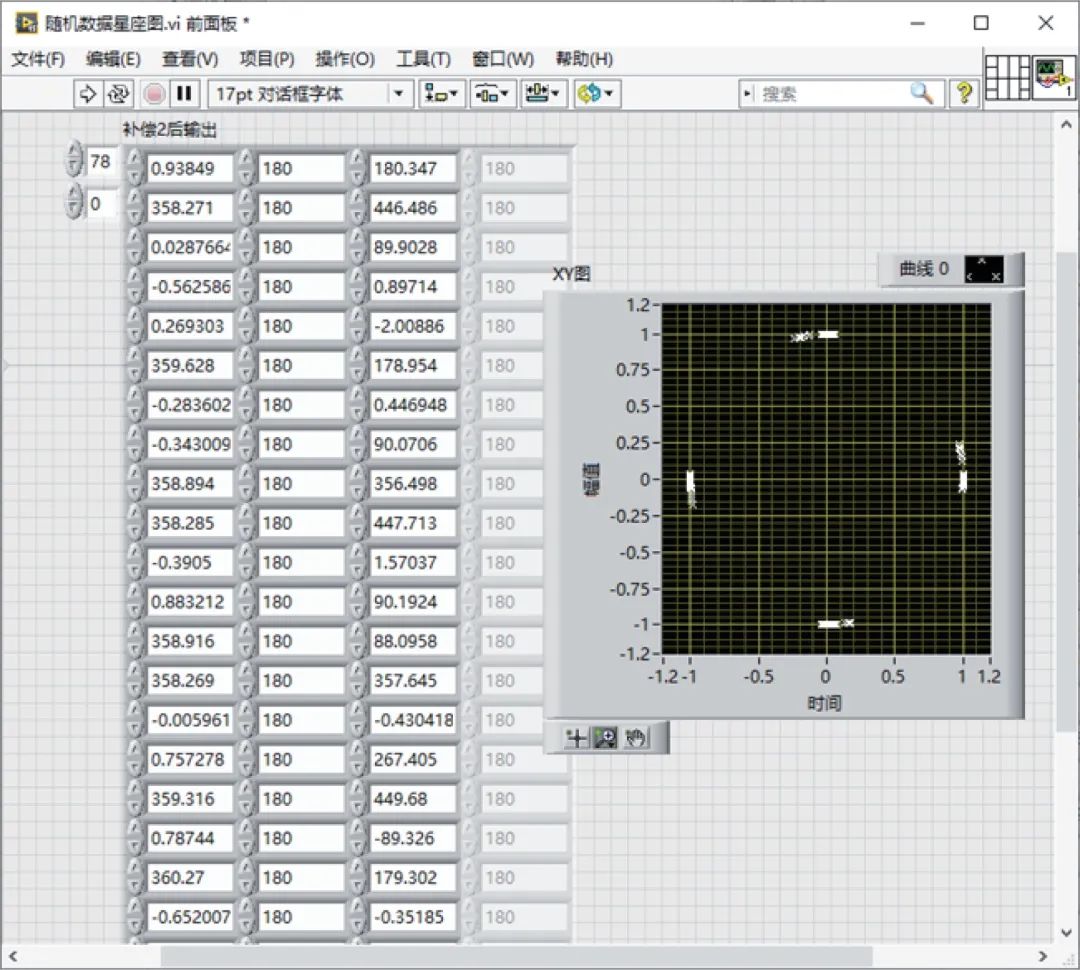
圖3 通信解調(diào)結(jié)果
圖4為經(jīng)MTD 處理之后的距離-多普勒實(shí)測(cè)圖。人體走動(dòng)速度約為1.7 m/s,面向雷達(dá)而行,距離由遠(yuǎn)及近。圖4 中的亮點(diǎn)表示所探測(cè)到的目標(biāo),亮度越高表示雷達(dá)接收到的目標(biāo)回波信號(hào)的功率越強(qiáng),此回波信號(hào)經(jīng)處理后積累的能量也越多,故雜波對(duì)目標(biāo)探測(cè)的干擾越小,更容易辨認(rèn)出移動(dòng)目標(biāo)。
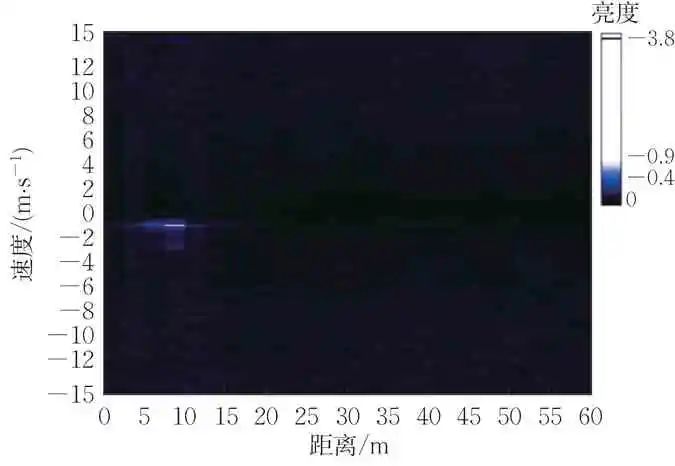
圖4 經(jīng)MTD 處理后的距離-多普勒?qǐng)D
5 結(jié)語(yǔ)
設(shè)計(jì)了基于DM-FMCW 的一體化波形,以FMCW 波形為載波,采用π/4 相移的QPSK 和QPSK 來(lái)調(diào)制加載信息,將其合成一體化信號(hào)。分別給出了通信解調(diào)和雷達(dá)回波處理方案,并搭建一體化系統(tǒng)。結(jié)果表明:調(diào)制通信信息不會(huì)影響雷達(dá)檢測(cè)性能,雷達(dá)距離分辨率為1 m,速度分辨率為0.1 m/s,通信誤碼率與QPSK 相同。根據(jù)此方案設(shè)計(jì)的一體化系統(tǒng)具有很好的實(shí)時(shí)性,可以為其他類(lèi)似調(diào)制方式實(shí)現(xiàn)一體化提供參考,且所需硬件設(shè)備并不復(fù)雜,系統(tǒng)模塊占用空間小,適合用于車(chē)載雷達(dá)通信一體化。
-
通信
+關(guān)注
關(guān)注
18文章
6391瀏覽量
140037 -
FMCW
+關(guān)注
關(guān)注
9文章
109瀏覽量
24347 -
車(chē)載雷達(dá)
+關(guān)注
關(guān)注
0文章
41瀏覽量
13859 -
雷達(dá)通信
+關(guān)注
關(guān)注
0文章
11瀏覽量
7396
原文標(biāo)題:DM-FMCW 車(chē)載雷達(dá)通信一體化系統(tǒng)設(shè)計(jì)
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
到底什么是“通感一體化”?
車(chē)載設(shè)備智能化、一體化,飛思卡爾又有新動(dòng)作
什么是機(jī)電一體化
機(jī)電一體化系統(tǒng)
關(guān)于車(chē)載雷達(dá)通信系統(tǒng)的詳細(xì)介紹
如何實(shí)現(xiàn)機(jī)電一體化設(shè)計(jì)?
如何實(shí)現(xiàn)一體化芯片-封裝協(xié)同設(shè)計(jì)系統(tǒng)的設(shè)計(jì)?
光機(jī)電氣一體化控制實(shí)訓(xùn)系統(tǒng)
怎樣去選擇一體化步進(jìn)系統(tǒng)的子系統(tǒng)
測(cè)控一體化閘門(mén)系統(tǒng)
安防通信一體化系統(tǒng)
通信感知一體化大佬和課題組

雷達(dá)和通信功能的一體化實(shí)現(xiàn)設(shè)計(jì)

OFDM-MSK-LFM雷達(dá)通信一體化信號(hào)性能分析




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論