") EtherCAT運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)開(kāi)發(fā)(一):驅(qū)動(dòng)安裝
EtherCAT運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)開(kāi)發(fā)(一):驅(qū)動(dòng)安裝

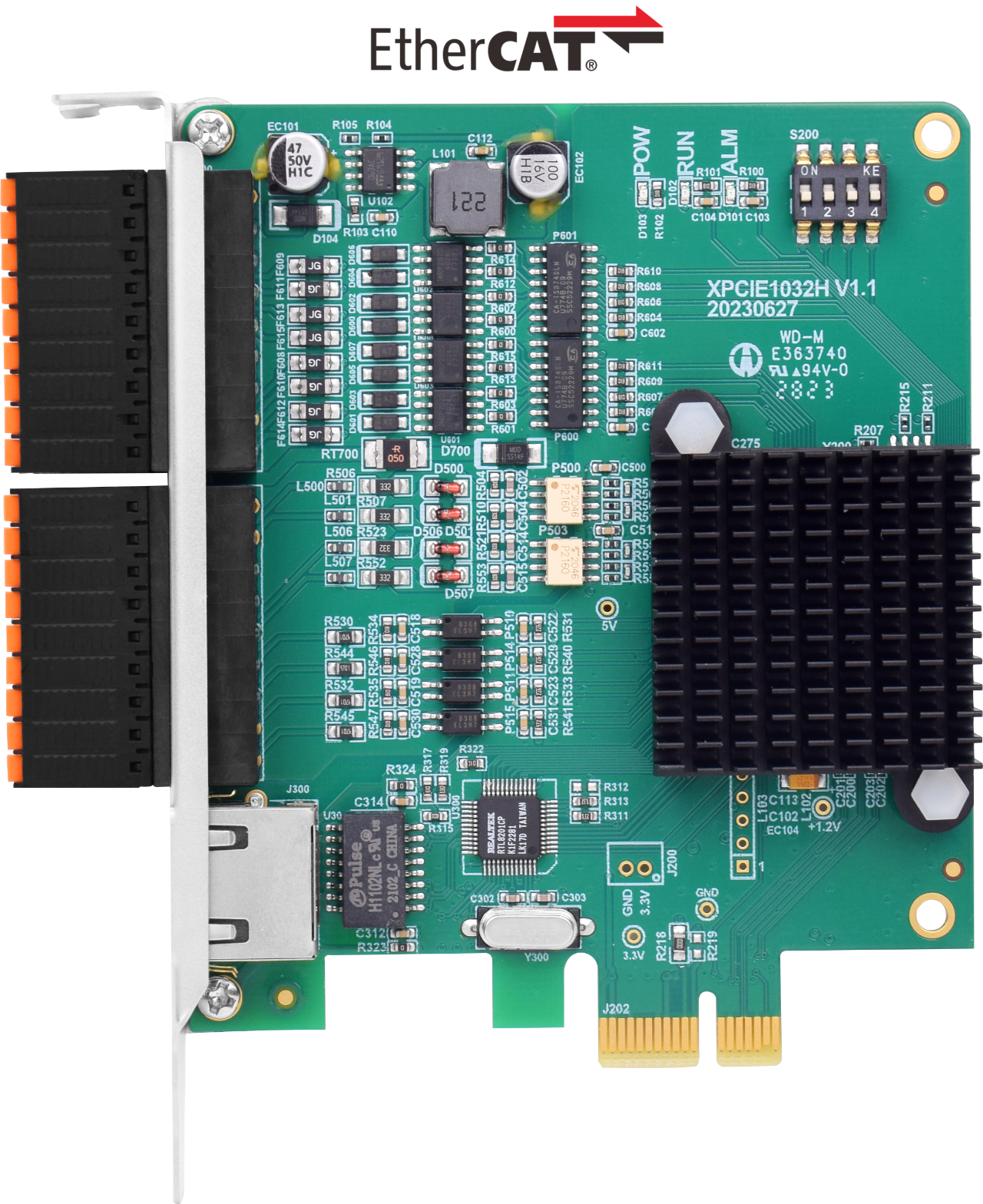
XPCIE1032H功能簡(jiǎn)介
XPCIE1032H是一款基于PCI Express的EtherCAT總線運(yùn)動(dòng)控制卡,可選6-64軸運(yùn)動(dòng)控制,支持多路高速數(shù)字輸入輸出,可輕松實(shí)現(xiàn)多軸同步控制和高速數(shù)據(jù)傳輸。
XPCIE1032H集成了強(qiáng)大的運(yùn)動(dòng)控制功能,結(jié)合MotionRT7運(yùn)動(dòng)控制實(shí)時(shí)軟核,解決了高速高精應(yīng)用中,PC Windows開(kāi)發(fā)的非實(shí)時(shí)痛點(diǎn),指令交互速度比傳統(tǒng)的PCI/PCIe快10倍。
XPCIE1032H支持PWM,PSO功能,板載16進(jìn)16出通用IO口,其中輸出口全部為高速輸出口,可配置為4路PWM輸出口或者16路高速PSO硬件比較輸出口。輸入口含有8路高速輸入口,可配置為4路高速色標(biāo)鎖存或兩路編碼器輸入。
XPCIE1032H搭配MotionRT7實(shí)時(shí)內(nèi)核,使用本地LOCAL接口連接,通過(guò)高速的核內(nèi)交互,可以做到更快速的指令交互,單條指令與多條指令一次性交互時(shí)間可以達(dá)到3-5us左右。
?XPCIE1032H與MotionRT7實(shí)時(shí)內(nèi)核的配合具有以下優(yōu)勢(shì):
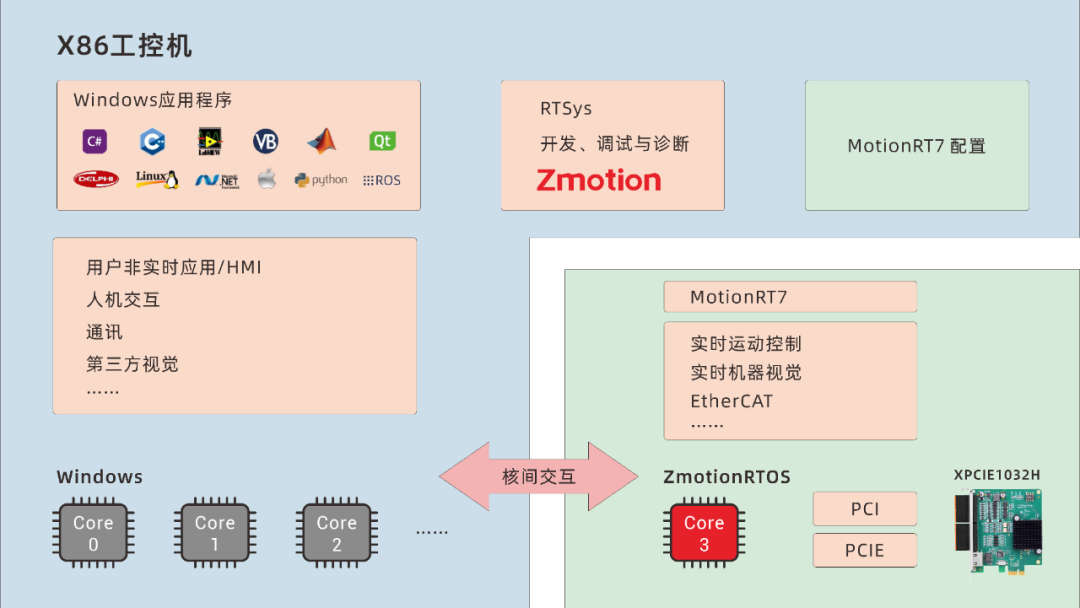
1.支持多種上位機(jī)語(yǔ)言開(kāi)發(fā),所有系列產(chǎn)品均可調(diào)用同一套API函數(shù)庫(kù);
2.借助核內(nèi)交互,可以快速調(diào)用運(yùn)動(dòng)指令,響應(yīng)時(shí)間快至微秒級(jí),比傳統(tǒng)PCI/PCIe快10倍;
3.解決傳統(tǒng)PCI/PCIe運(yùn)動(dòng)控制卡在Windows環(huán)境下控制系統(tǒng)的非實(shí)時(shí)性問(wèn)題;
4.支持一維/二維/三維PSO(高速硬件位置比較輸出),適用于視覺(jué)飛拍、精密點(diǎn)膠和激光能量控制等應(yīng)用;
5.提供高速輸入接口,便于實(shí)現(xiàn)位置鎖存;
6.支持EtherCAT總線和脈沖輸出混合聯(lián)動(dòng)、混合插補(bǔ)。
?使用XPCIE1032H和MotionRT7進(jìn)行項(xiàng)目開(kāi)發(fā)時(shí),通常需要進(jìn)行以下步驟:
1.安裝驅(qū)動(dòng)程序并簽名認(rèn)證,識(shí)別XPCIE1032H;
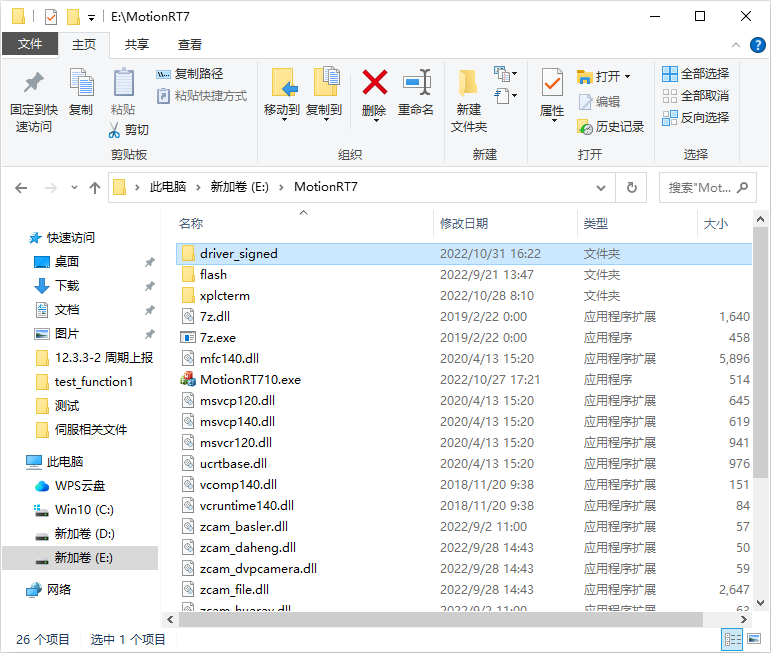
2.打開(kāi)并執(zhí)行文件“MotionRT710.exe”,配置參數(shù)和運(yùn)行運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核;
3.使用ZDevelop軟件連接到控制器,進(jìn)行參數(shù)監(jiān)控。連接時(shí)請(qǐng)使用PCI/LOCAL方式,并確保ZDevelop軟件版本在3.10以上;
4.完成控制程序開(kāi)發(fā),通過(guò)LOCAL鏈接方式連接到運(yùn)動(dòng)控制卡,實(shí)現(xiàn)實(shí)時(shí)運(yùn)動(dòng)控制。
?與傳統(tǒng)PCI/PCIe卡和PLC的測(cè)試數(shù)據(jù)結(jié)果對(duì)比:
| 平均值 | C++ LOCAL | C# LOCAL | 傳統(tǒng)PCI/PCIe卡接口交互 | PLC網(wǎng)口通訊交互 |
| 1w次單條讀取交互周期 | 4.70us | 5.3us | 64us | 500us-10ms |
| 10w次單條讀取交互周期 | 3.90us | 5.7us | 65us | 500us-10ms |
| 1w次多條讀取交互周期 | 6.20us | 8.85us | 472us | 500us-10ms |
| 10w次多條讀取交互周期 | 5.50us | 8.37us | 471us | 500us-10ms |
我們可以從測(cè)試對(duì)比結(jié)果看出,XPCIE1032H運(yùn)動(dòng)控制卡配合實(shí)時(shí)運(yùn)動(dòng)控制內(nèi)核MotionRT7,在LOCAL鏈接(核內(nèi)交互)的方式下,指令交互的效率是非常穩(wěn)定,當(dāng)測(cè)試數(shù)量從1w增加到10w時(shí),單條指令交互時(shí)間與多條指令交互時(shí)間波動(dòng)不大,非常適用于高速高精的應(yīng)用。
XPCIE1032H卡安裝
關(guān)閉計(jì)算機(jī)電源。
打開(kāi)計(jì)算機(jī)機(jī)箱,選擇一條空閑的XPCIE卡槽,用螺絲刀卸下相應(yīng)的擋板條。
將運(yùn)動(dòng)控制卡插入該槽,擰緊擋板條上的固定螺絲。
卸下臨近插槽的一條擋板條,用螺絲將轉(zhuǎn)接板固定在機(jī)箱該插槽上。
一、驅(qū)動(dòng)安裝
首先需要到正運(yùn)動(dòng)技術(shù)官網(wǎng)下載《MotionRT7運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核》安裝包,并檢測(cè)此時(shí)PCIE卡已安裝到工控機(jī)的PCIE插槽上,無(wú)明顯松動(dòng)翹邊。
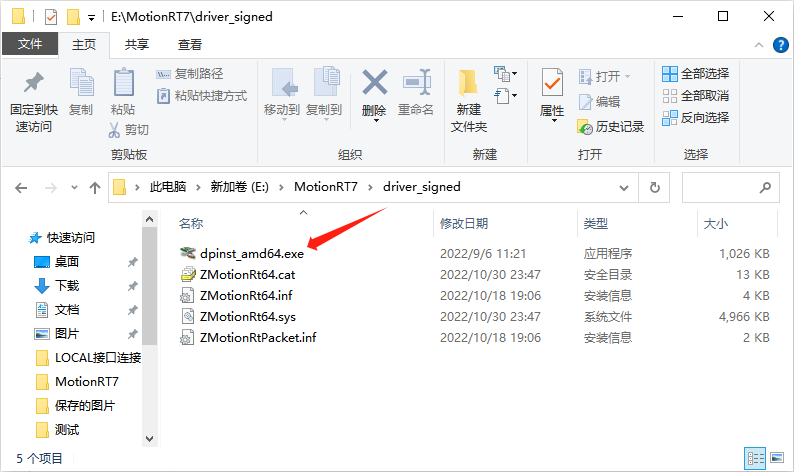
方法一:使用驅(qū)動(dòng)目錄中自帶的安裝向?qū)к浖pinst_amd64.exe自動(dòng)安裝,具體操作按軟件指南。
方法二:手動(dòng)安裝。
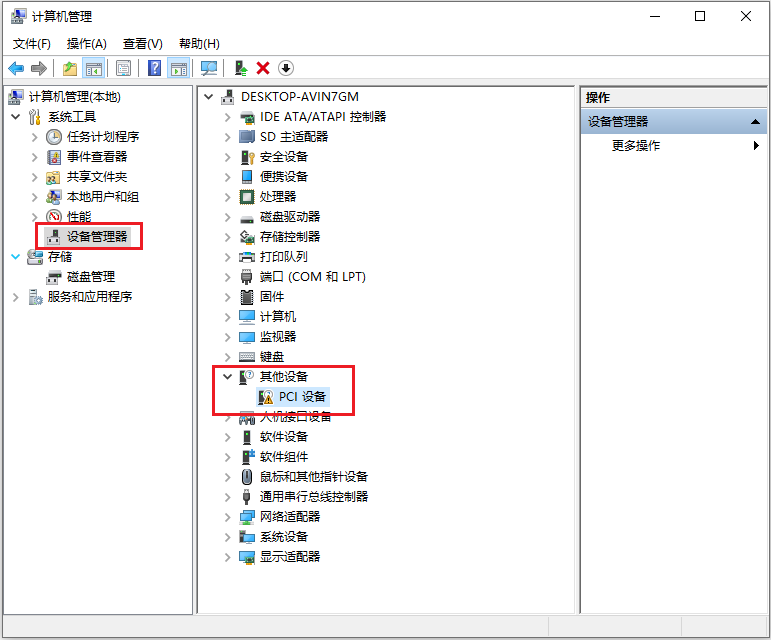
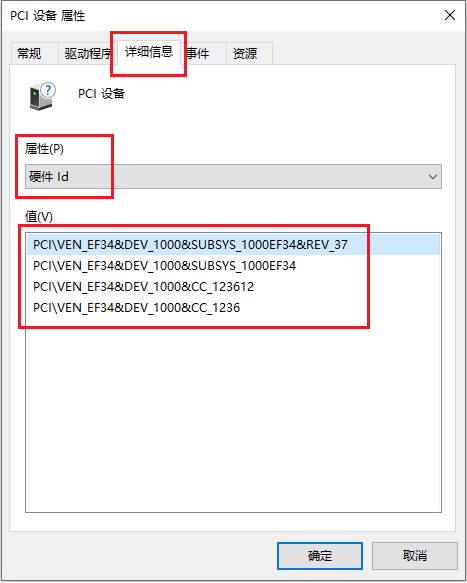
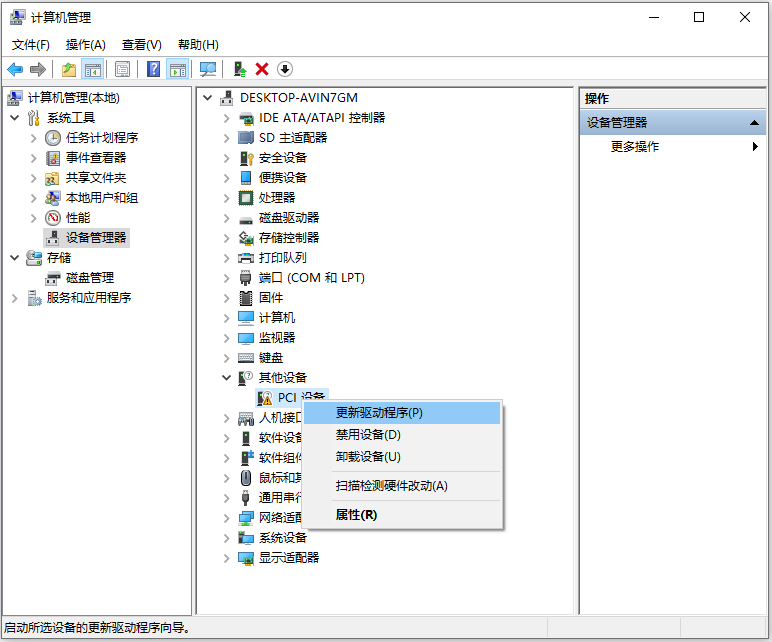
1.打開(kāi)“設(shè)備管理器”菜單選擇“其他設(shè)備”中的“PCI設(shè)備”。
2.若存在多個(gè)PCI設(shè)備時(shí),鼠標(biāo)右擊“屬性”查看詳細(xì)信息,屬性選擇“硬件ID”,確認(rèn)為PCIVEN_EF34&DEV_1000&開(kāi)頭的PCI設(shè)備。
3.右擊選擇“更新驅(qū)動(dòng)程序”。
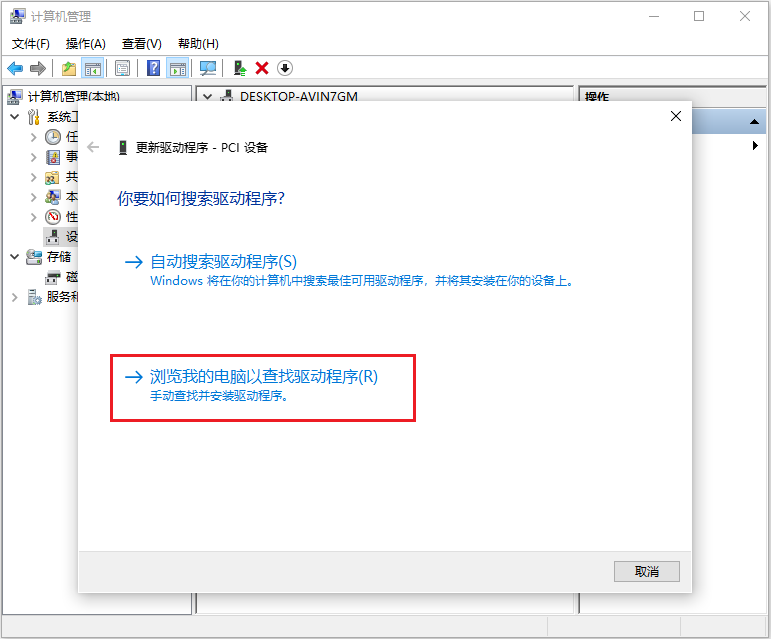
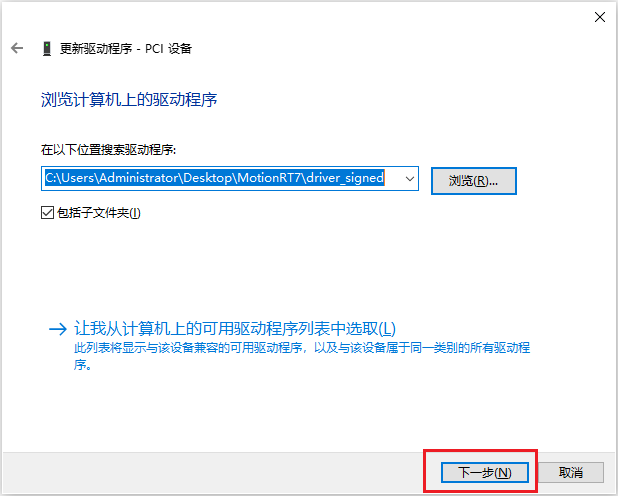
4.選擇“手動(dòng)瀏覽”查找驅(qū)動(dòng)程序。
5.點(diǎn)擊瀏覽,選擇驅(qū)動(dòng)driver文件夾。
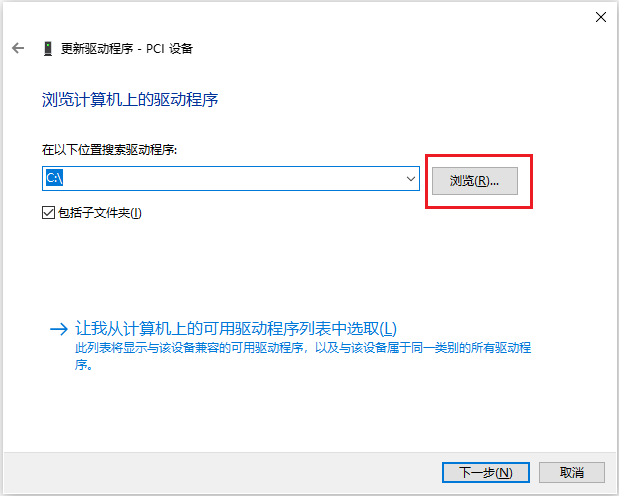
6.點(diǎn)擊下一步。
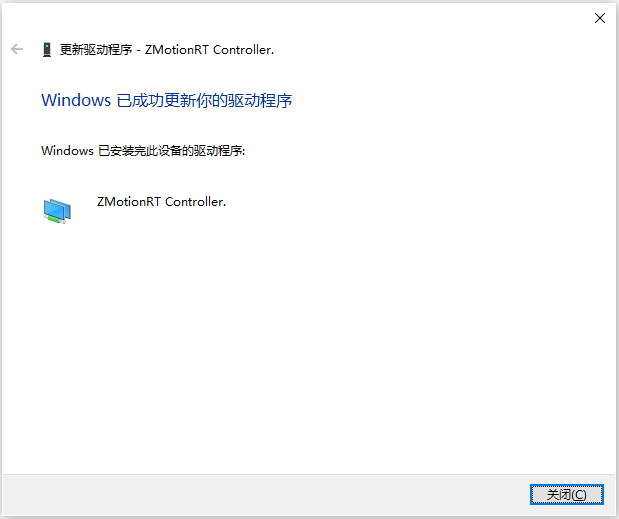
7.等待安裝完成,點(diǎn)擊關(guān)閉。
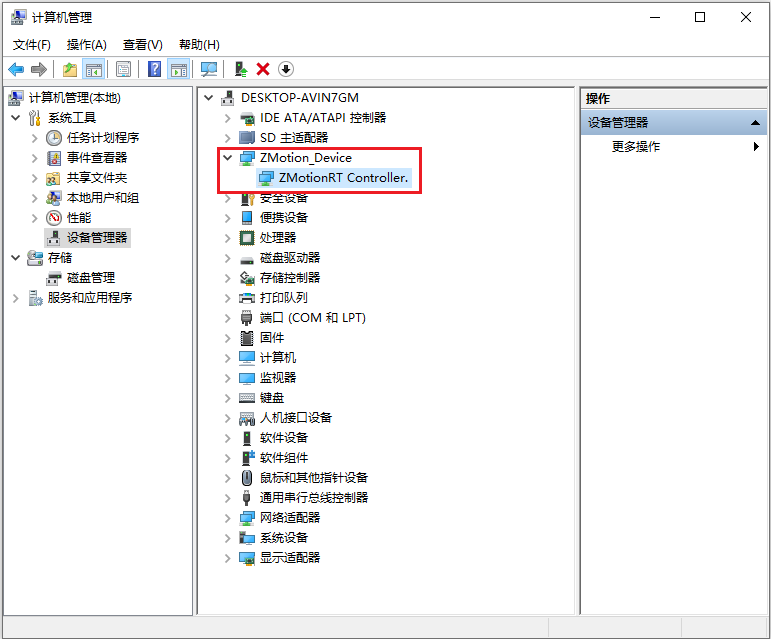
8.在設(shè)備管理器中有ZMotionRT Controller就是安裝成功。
二、建立連接
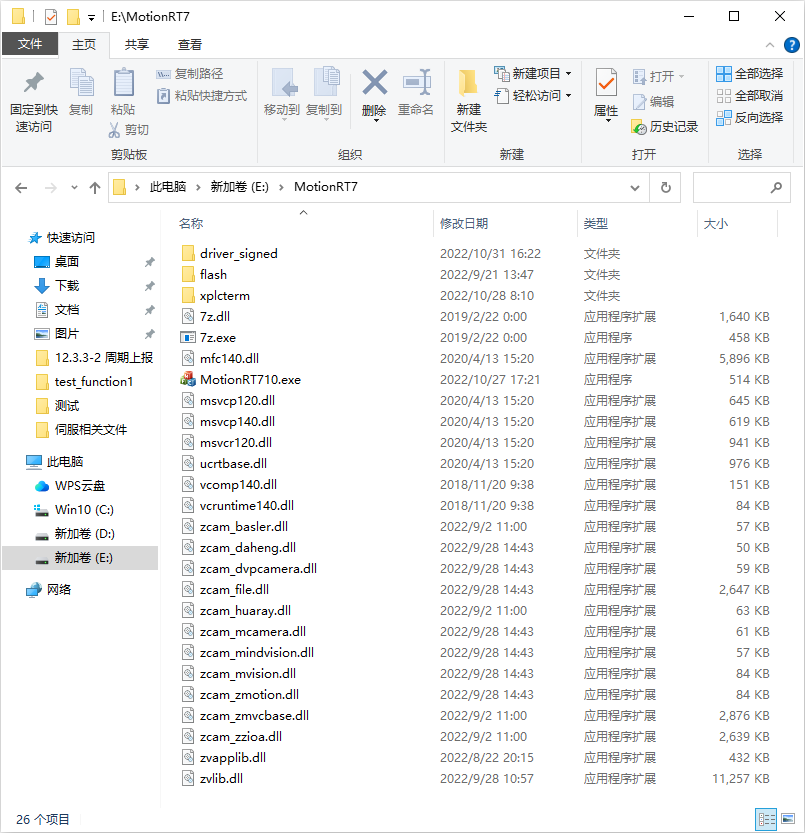
1.運(yùn)行控制臺(tái)程序
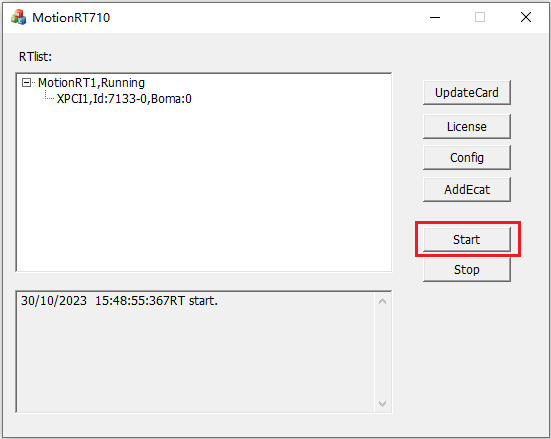
(1)打開(kāi)控制臺(tái)程序所在位置,運(yùn)行可執(zhí)行文件“MotionRt710.exe”。
(2)點(diǎn)擊“Start”。
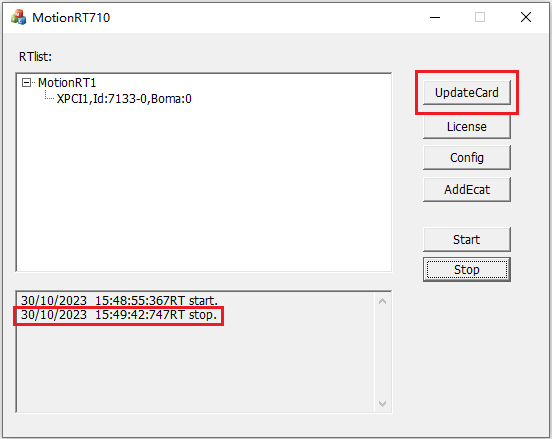
(3)保存XPCIE卡Config配置。
a.先點(diǎn)擊【Stop】按鈕關(guān)閉MontionRT7控制臺(tái),再點(diǎn)擊UpdateCard更新卡信息。
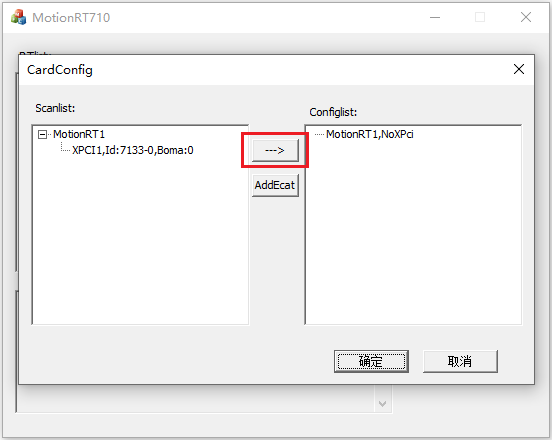
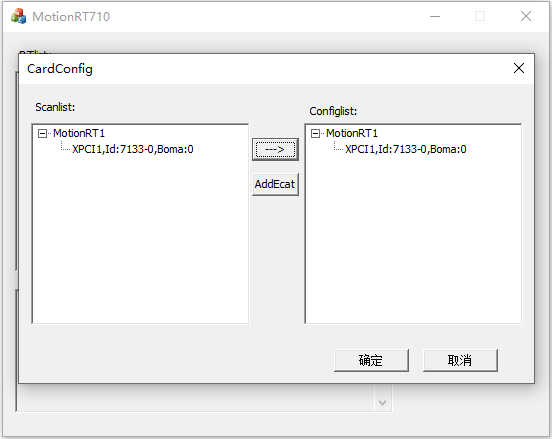
b.點(diǎn)擊“-->”將當(dāng)前配置保存到歷史配置中,方便下次打開(kāi)可以直接使用。
c.保存完成后,點(diǎn)擊確定。
2.新建C#項(xiàng)目(VS2022)

3.到正運(yùn)動(dòng)技術(shù)官網(wǎng)的下載中心選擇需要的平臺(tái)庫(kù)文件
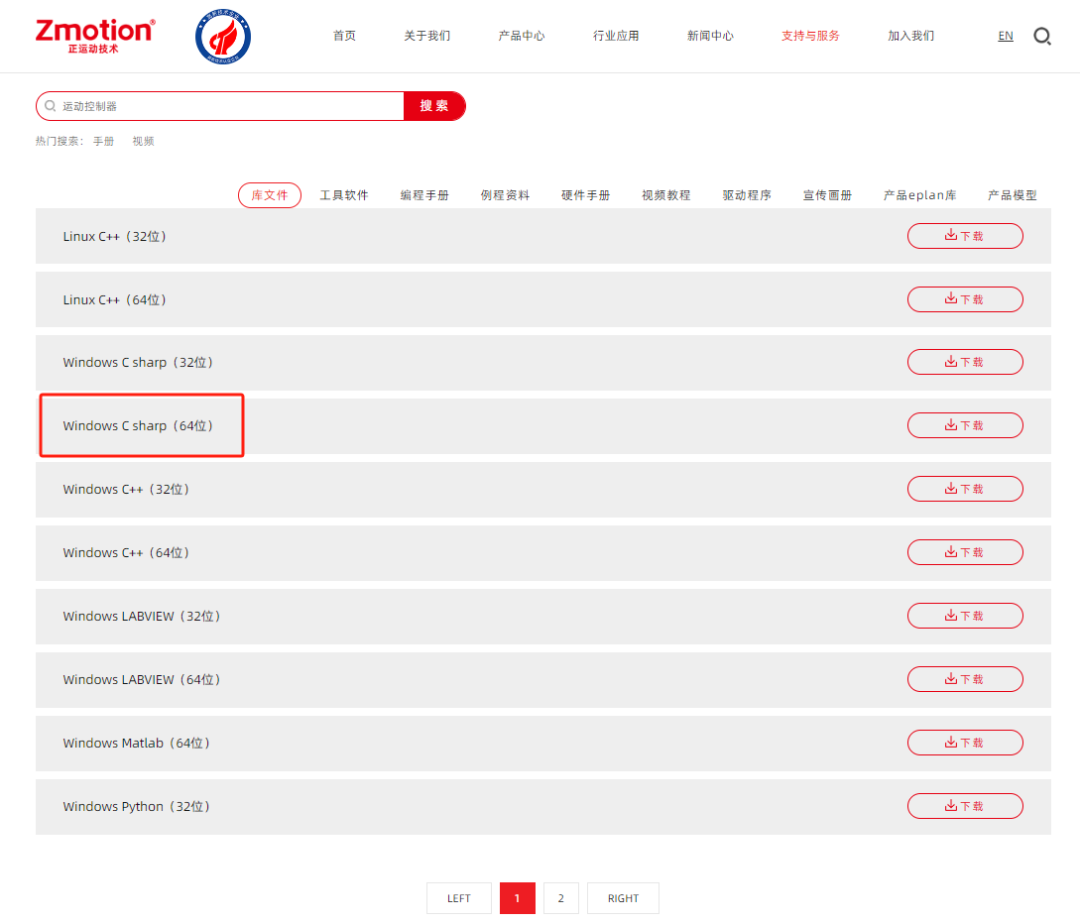
4.解壓下載的安裝包找到“Zmcaux.cs”,“zauxdll.dll”,“zmotion.dll”放入到項(xiàng)目文件中
(1)“Zmcaux.cs”放在項(xiàng)目根目錄文件中,與bin目錄同級(jí)。
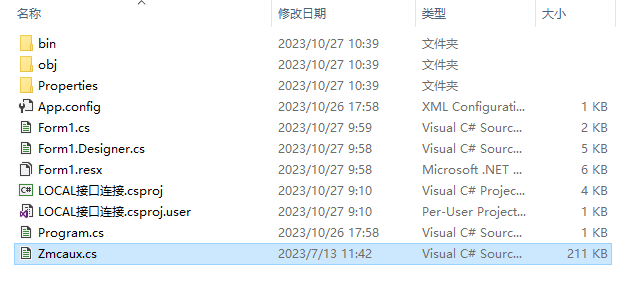
(2)“zauxdll.dll”,“zmotion.dll”放在bin → Debug。

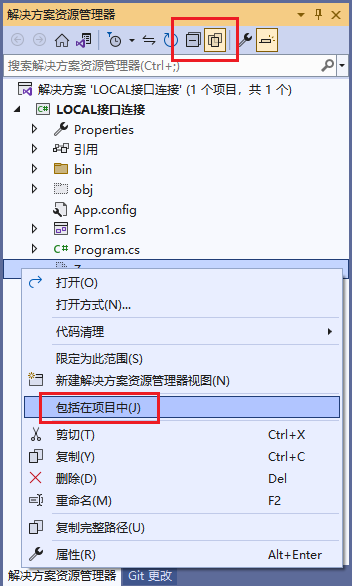
5.用vs打開(kāi)新建的項(xiàng)目文件,在右邊的解決方案資源管理器中點(diǎn)擊顯示所有,然后鼠標(biāo)右鍵點(diǎn)擊zmcaux.cs文件,點(diǎn)擊包括在項(xiàng)目中
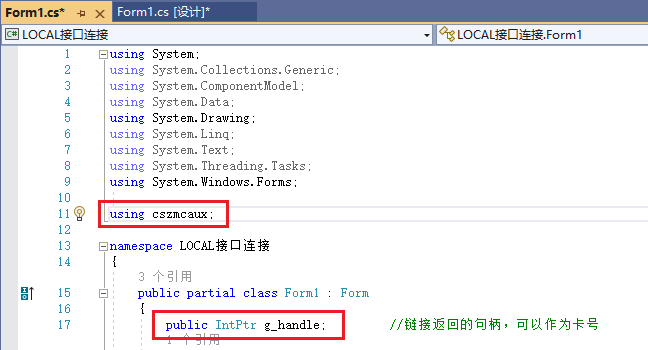
6.雙擊Form1.cs里面的Form1,出現(xiàn)代碼編輯界面,在文件開(kāi)頭寫(xiě)入using cszmcaux,并聲明控制器句柄g_handle
7.相關(guān)PC函數(shù)介紹
| 指令1 | ZAux_FastOpen | ||||||||
| 指令原型 | int32 __stdcall ZAux_FastOpen(int type, char *pconnectstring, uint32 uims ,ZMC_HANDLE * phandle) | ||||||||
| 指令說(shuō)明 | 與控制器建立連接, 可以指定連接的等待時(shí)間 | ||||||||
| 輸入?yún)?shù) |
|
||||||||
| 輸出參數(shù) |
|
||||||||
| 返回值 | 成功返回值為0,非0詳見(jiàn)錯(cuò)誤碼說(shuō)明。 | ||||||||
| 指令示例 |
串口連接: ZMC_HANDLE phandle;//控制器連接句柄 Char comID[32]= "0";//串口ID ZAux_FastOpen(1, comID,1000s ,&phandle); 網(wǎng)口連接例子: ZMC_HANDLE phandle;//控制器連接句柄 Char EthID[32]= "192.168.0.11";//網(wǎng)口ID ZAux_FastOpen(2, EthID,1000s ,&phandle); LOCAL接口連接例子: ZMC_HANDLE phandle;//控制器連接句柄 ZAux_FastOpen(ZMC_CONNECTION_LOCAL, "LOCAL1",3000,&g_handle); |
| 指令2 | ZAux_Direct_GetDpos | ||||||
| 指令原型 | int32__stdcallZAux_Direct_GetDpos(ZMC_HANDLEhandle,int iaxis, float *pfValue) | ||||||
| 指令說(shuō)明 | 讀取軸當(dāng)前位置或稱控制器發(fā)送的需求位置,單位units。 | ||||||
| 輸入?yún)?shù) |
|
||||||
| 輸出參數(shù) |
|
||||||
| 返回值 | 成功返回值為0,非0詳見(jiàn)錯(cuò)誤碼說(shuō)明。 | ||||||
| 指令示例 | 軸基本運(yùn)動(dòng)參數(shù)設(shè)置獲取 | ||||||
| 詳細(xì)說(shuō)明 | / |
| 指令3 | ZAux_DirectCommand | ||||||||
| 指令原型 | int32 __stdcall ZAux_DirectCommand(ZMC_HANDLE handle, const char *pszCommand,char *psResponse, uint32 uiResponseLength) | ||||||||
| 指令說(shuō)明 | 發(fā)送字符串命令到控制器,直接方式(不進(jìn)緩沖區(qū),有少數(shù)命令,暫時(shí)不支持)。 | ||||||||
| 輸入?yún)?shù) |
|
||||||||
| 輸出參數(shù) |
|
||||||||
| 返回值 | 成功返回值為0,非0詳見(jiàn)錯(cuò)誤碼說(shuō)明。 | ||||||||
| 指令示例 | 在線命令函數(shù)的使用 | ||||||||
| 詳細(xì)說(shuō)明 | 上位機(jī)調(diào)用上位機(jī)未封裝的Basic指令功能 |
| 指令4 | ZAux_Close | ||||
| 指令原型 | int32 __stdcall ZAux_Close(ZMC_HANDLE handle) | ||||
| 指令說(shuō)明 | 關(guān)閉控制器連接。 | ||||
| 輸入?yún)?shù) |
|
||||
| 輸出參數(shù) | / | ||||
| 返回值 | 成功返回值為0,非0詳見(jiàn)錯(cuò)誤碼說(shuō)明。 | ||||
| 指令示例 | 串口連接控制器 | ||||
| 詳細(xì)說(shuō)明 | / |
在form設(shè)計(jì)界面找到需要用到的控件拖拽到窗體中進(jìn)行UI界面設(shè)計(jì),效果如下。
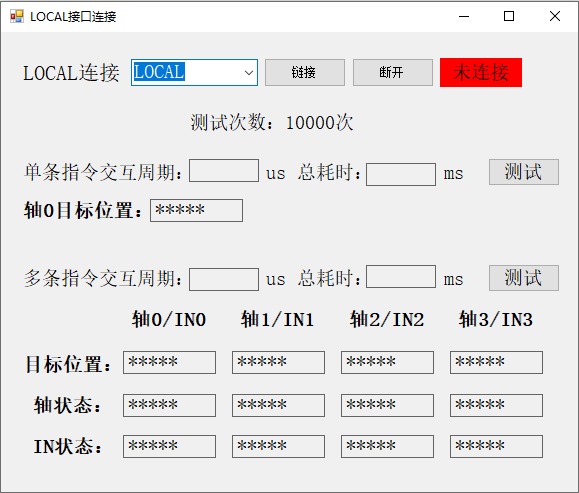
8.相關(guān)程序
(1)通過(guò)LOCAL鏈接方式的鏈接按鈕的消息響應(yīng)函數(shù)來(lái)鏈接控制器。
private void button4_Click(object sender, EventArgs e)
{
//LOCAL方式連接
int ret = zmcaux.ZAux_FastOpen(5, "LOCAL", 1000, out g_handle);
if (ret == 0)
{
label2.Text = "已鏈接";
label2.BackColor = Color.Green;
MessageBox.Show("控制器鏈接成功!", "提示");
}
else
{
MessageBox.Show("鏈接失敗,請(qǐng)選擇正確的LOCAL!");
}
}
(2)通過(guò)單條指令交互周期的測(cè)試按鈕的事件處理函數(shù)來(lái)計(jì)算單條指令的交互周期和總耗時(shí)。
private void SingleRun(object sender, EventArgs e)
{
float dpos = 0;
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i <10000; i++)
{
zmcaux.ZAux_Direct_GetDpos(g_handle, 0, ref dpos);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label14.Text = (ts.TotalMilliseconds).ToString();
label2.Text = ((ts.TotalMilliseconds * 1000) / 10000).ToString();
label16.Text = dpos.ToString();
}
(3)通過(guò)多條指令交互周期的測(cè)試按鈕的事件處理函數(shù)來(lái)計(jì)算多條指令的交互周期和總耗時(shí)。
private void MuchRun(object sender, EventArgs e)
{
int[] status = { 0, 0, 0, 0 };
float[] dpos = { 0, 0, 0, 0 };
uint[] num = { 0, 0, 0, 0 };
string cmd;
int star = 0;
StringBuilder cmdBuff = new StringBuilder(2048);
string[] tmp = new string[12];
cmd = "?dpos(0),dpos(1),dpos(2),dpos(3),axisstatus(0),axisstatus(1),axisstatus(2),axisstatus(3),in(0),in(1),in(2),in(3)";
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < 10000; i++)
{
zmcaux.ZAux_DirectCommand(g_handle, cmd, cmdBuff, 2048);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label23.Text = (ts.TotalMilliseconds).ToString();
label16.Text = ((ts.TotalMilliseconds * 1000) / 10000).ToString();
string s = cmdBuff.ToString();
string[] arrS = new string[20];
for (int i = 0; i < s.Length; i++)
{
if (s[i] != 9)
{
arrS[star] += s[i];
}
else
{
star++;
continue;
}
????}
label24.Text = arrS[0];
label25.Text = arrS[1];
label26.Text = arrS[2];
label27.Text = arrS[3];
label28.Text = arrS[4];
label30.Text = arrS[5];
label32.Text = arrS[6];
label34.Text = arrS[7];
if (Convert.ToInt32(arrS[8]) == 0)
{
label29.BackColor = Color.Red;
label29.Text = "信號(hào)未觸";
}
else
{
label29.BackColor = Color.Green;
label29.Text = "信號(hào)已觸";
}
if (Convert.ToInt32(arrS[9]) == 0)
{
label31.BackColor = Color.Red;
label31.Text = "信號(hào)未觸";
}
else
{
label31.BackColor = Color.Green;
label31.Text = "信號(hào)已觸";
}
if (Convert.ToInt32(arrS[10]) == 0)
{
label33.BackColor = Color.Red;
label33.Text = "信號(hào)未觸";
}
else
{
label33.BackColor = Color.Green;
label33.Text = "信號(hào)已觸";
}
if (Convert.ToInt32(arrS[11]) == 0)
{
label35.BackColor = Color.Red;
label35.Text = "信號(hào)未觸";
}
else
{
label35.BackColor = Color.Green;
label35.Text = "信號(hào)已觸";
}
}
(4)通過(guò)斷開(kāi)按鈕的消息響應(yīng)函數(shù)來(lái)斷開(kāi)控制器的鏈接。
private void button1_Click(object sender, EventArgs e)
{
zmcaux.ZAux_Close(g_handle);
g_handle = (IntPtr)0;
label2.Text = "未連接";
label2.BackColor = Color.Red;
}
9.運(yùn)行效果

審核編輯:劉清
-
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
5文章
829瀏覽量
34632 -
上位機(jī)
+關(guān)注
關(guān)注
27文章
1021瀏覽量
57260 -
EtherCAT總線
+關(guān)注
關(guān)注
5文章
95瀏覽量
5968 -
PWM輸出
+關(guān)注
關(guān)注
1文章
68瀏覽量
6810
原文標(biāo)題:EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(一):驅(qū)動(dòng)安裝與建立連接
文章出處:【微信號(hào):伺服與運(yùn)動(dòng)控制,微信公眾號(hào):伺服與運(yùn)動(dòng)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(九)
EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(十三)
EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(十四)


EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#人工智能 #運(yùn)動(dòng)控制卡# 正運(yùn)動(dòng)技術(shù)

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H驅(qū)動(dòng)安裝# 運(yùn)動(dòng)控制卡# 正運(yùn)動(dòng)技術(shù)# PCIE

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(二):EtherCAT總線初始化
EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(三):EtherCAT總線模式切換

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(五):通過(guò)RTSys進(jìn)行調(diào)試與診斷
PT/PVT運(yùn)動(dòng)模式介紹:EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#人工智能
XPCIE1032運(yùn)動(dòng)控制卡硬件手冊(cè)
不止10倍提速!PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H 等您評(píng)測(cè)!

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(一):驅(qū)動(dòng)安裝與建立連接
EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡(二):EtherCAT總線初始化

基于PCI Express的EtherCAT總線運(yùn)動(dòng)控制卡-XPCIE1032H
EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論