") 控制算法PID之積分控制(I)的原理和示例代碼
控制算法PID之積分控制(I)的原理和示例代碼

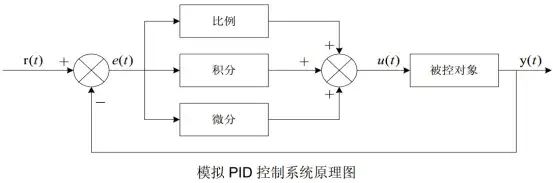
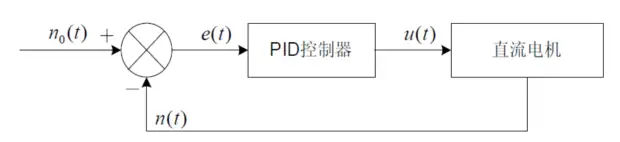
積分(I)項(xiàng)是PID控制器的一個(gè)重要組成部分,它對系統(tǒng)的控制輸出做出反應(yīng),以減小系統(tǒng)的靜態(tài)誤差,即長時(shí)間內(nèi)誤差積累導(dǎo)致的誤差。積分項(xiàng)的作用是在控制系統(tǒng)中引入一個(gè)積分效應(yīng),以便持續(xù)減小系統(tǒng)的穩(wěn)態(tài)誤差。
以下是積分(I)項(xiàng)的詳細(xì)介紹:
1.作用原理:積分項(xiàng)的計(jì)算基于誤差的積分,通常是誤差隨時(shí)間的積分。積分項(xiàng)將誤差積累,并根據(jù)積分時(shí)間常數(shù)T(i)來計(jì)算控制輸出。積分項(xiàng)的數(shù)學(xué)表達(dá)式如下:
2.影響:積分項(xiàng)對系統(tǒng)的控制輸出有兩個(gè)主要作用:首先,它減小系統(tǒng)的穩(wěn)態(tài)誤差,確保系統(tǒng)最終能夠達(dá)到期望值;其次,它幫助減小系統(tǒng)的過度調(diào)節(jié),防止振蕩。積分項(xiàng)通常在控制系統(tǒng)長時(shí)間運(yùn)行時(shí)顯現(xiàn)出作用,對短期變化的響應(yīng)較小。
3.積分時(shí)間常數(shù):積分時(shí)間常數(shù)T(i)是一個(gè)重要參數(shù),它控制了積分項(xiàng)的響應(yīng)速度。較大的T(i)值會(huì)導(dǎo)致積分項(xiàng)的響應(yīng)較慢,較小的T(i)值會(huì)導(dǎo)致響應(yīng)較快。通過調(diào)整T(i),可以平衡系統(tǒng)的穩(wěn)態(tài)誤差和過度調(diào)節(jié)之間的關(guān)系。
4.調(diào)節(jié):調(diào)節(jié)積分增益K(i)和積分時(shí)間常數(shù)T(i)是調(diào)整PID控制器性能的關(guān)鍵。根據(jù)具體應(yīng)用,您可能需要不同的K(i)和T(i)值。一種常見的調(diào)節(jié)方法是通過試驗(yàn)和模擬來找到合適的K(i)和T(i)值,以使系統(tǒng)能夠快速達(dá)到期望值并保持穩(wěn)定。
5.特點(diǎn):積分項(xiàng)主要用于減小穩(wěn)態(tài)誤差,因此在系統(tǒng)長時(shí)間運(yùn)行時(shí)起關(guān)鍵作用。如果積分項(xiàng)設(shè)置得過高,可能會(huì)導(dǎo)致系統(tǒng)過度調(diào)節(jié)或振蕩。如果積分項(xiàng)設(shè)置得過低,系統(tǒng)可能無法消除穩(wěn)態(tài)誤差。
在PID控制器中,積分項(xiàng)通常與比例項(xiàng)和微分項(xiàng)一起使用,以綜合控制系統(tǒng)的性能。合理設(shè)置積分增益K(i)和積分時(shí)間常數(shù)T(i)是PID控制器調(diào)節(jié)的關(guān)鍵,因?yàn)樗鼈冎苯佑绊懥讼到y(tǒng)的穩(wěn)態(tài)誤差和響應(yīng)速度。通過仔細(xì)調(diào)整積分項(xiàng),可以實(shí)現(xiàn)系統(tǒng)的精確控制和穩(wěn)定性。
積分(I)項(xiàng)通常在實(shí)際的PID控制器實(shí)現(xiàn)中需要進(jìn)行累積誤差,以計(jì)算積分項(xiàng)的控制輸出。下面是一個(gè)簡單的C語言示例代碼,演示如何計(jì)算積分項(xiàng)的控制輸出:
#include
// PID控制器參數(shù)float Ki = 0.1; // 積分增益float Ti = 1.0; // 積分時(shí)間常數(shù)
// 全局變量用于存儲(chǔ)累積誤差float accumulatedError = 0.0;
// 計(jì)算積分項(xiàng)float calculateIntegral(float error, float deltaTime) { // 累積誤差 accumulatedError += error * deltaTime;
// 計(jì)算積分項(xiàng)的控制輸出 float integralOutput = Ki * accumulatedError / Ti; return integralOutput;}
int main() { float setpoint = 100.0; // 期望值 float processVariable = 80.0; // 實(shí)際測量值 float error = setpoint - processVariable; float deltaTime = 0.1; // 采樣時(shí)間間隔
// 計(jì)算積分項(xiàng)的控制輸出 float output = calculateIntegral(error, deltaTime);
// 輸出結(jié)果 printf("Integral Output: %f\n", output);
return 0;}
在上面的示例中,我們定義了積分增益(Ki)和積分時(shí)間常數(shù)(Ti),它們用于調(diào)整積分項(xiàng)的影響。calculateIntegral 函數(shù)接受誤差值和采樣時(shí)間間隔作為參數(shù),然后通過累積誤差來計(jì)算積分項(xiàng)的控制輸出。最后,我們使用示例值來計(jì)算積分項(xiàng)的輸出并打印結(jié)果。
-
控制器
+關(guān)注
關(guān)注
114文章
17791瀏覽量
193234 -
PID
+關(guān)注
關(guān)注
38文章
1499瀏覽量
91206 -
控制算法
+關(guān)注
關(guān)注
4文章
171瀏覽量
22747
發(fā)布評(píng)論請先 登錄
變頻器內(nèi)置PID控制參數(shù)的含義

變頻器pid怎么啟用

PID控制的算法
講解C語言代碼的實(shí)現(xiàn)過程
C語言的PID算法
C語言實(shí)現(xiàn)PID算法介紹
C語言增量式PID的通用算法
CW32L012的PID溫度控制——算法基礎(chǔ)
怎樣理解變頻器內(nèi)置PID控制參數(shù)的含義
Aerodiode高帶寬激光鎖定PID控制器
CW32電機(jī)控制基礎(chǔ)——PID控制原理



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論