") LOAM源代碼中坐標(biāo)變換部分的詳細(xì)講解
LOAM源代碼中坐標(biāo)變換部分的詳細(xì)講解

作者:K.Fire
寫在前面
本系列文章將對LOAM源代碼進行講解,在講解過程中,涉及到論文中提到的部分,會結(jié)合論文以及我自己的理解進行解讀,尤其是對于其中坐標(biāo)變換的部分,將會進行詳細(xì)的講解。
本來是懶得寫的,一個是怕自己以后忘了,另外是我在學(xué)習(xí)過程中,其實沒有感覺哪一個博主能講解的通篇都能讓我很明白,特別是坐標(biāo)變換部分的代碼,所以想著自己學(xué)完之后,按照自己的理解,也寫一個LOAM解讀,希望能對后續(xù)學(xué)習(xí)LOAM的同學(xué)們有所幫助。
整體框架
LOAM多牛逼就不用多說了,直接開始
先貼一下我詳細(xì)注釋的LOAM代碼,在這個版本的代碼上加入了我自己的理解。
我覺得最重要也是最惡心的一部分是其中的坐標(biāo)變換,在代碼里面真的看著頭大,所以先明確一下坐標(biāo)系(都是右手坐標(biāo)系):
IMU(IMU坐標(biāo)系imu):x軸向前,y軸向左,z軸向上
LIDAR(激光雷達(dá)坐標(biāo)系l):x軸向前,y軸向左,z軸向上
CAMERA(相機坐標(biāo)系,也可以理解為里程計坐標(biāo)系c):z軸向前,x軸向左,y軸向上
WORLD(世界坐標(biāo)系w,也叫全局坐標(biāo)系,與里程計第一幀init重合):z軸向前,x軸向左,y軸向上
MAP(地圖坐標(biāo)系map,一定程度上可以理解為里程計第一幀init):z軸向前,x軸向左,y軸向上
坐標(biāo)變換約定: 為了清晰,變換矩陣的形式與《SLAM十四講中一樣》,即:表示B坐標(biāo)系相對于A坐標(biāo)系的變換,B中一個向量通過可以變換到A中的向量。首先對照ros的節(jié)點圖和論文中提到的算法框架來看一下:


可以看到節(jié)點圖和論文中的框架是一一對應(yīng)的,這幾個模塊的功能如下:
scanRegistration:對原始點云進行預(yù)處理,計算曲率,提取特征點
laserOdometry:對當(dāng)前sweep與上一次sweep進行特征匹配,計算一個快速(10Hz)但粗略的位姿估計
laserMapping:對當(dāng)前sweep與一個局部子圖進行特征匹配,計算一個慢速(1Hz)比較精確的位姿估計
transformMaintenance:對兩個模塊計算出的位姿進行融合,得到最終的精確地位姿估計
本文介紹laserOdometry模塊,它相當(dāng)于SLAM的前端,它其實是一個scan-to-scan的過程,可以得到高頻率但精度略低的位姿變換,它的具體功能如下:
接收特征點話題、全部點云話題、IMU話題,并保存到對應(yīng)的變量中
將當(dāng)前sweep與上一次sweep進行特征匹配,得到edge point匹配對應(yīng)的直線以及planar point匹配對應(yīng)的平面
計算雅可比矩陣,使用高斯牛頓法(論文中說的是LM法)進行優(yōu)化,得到估計出的相鄰兩幀的位姿變換
累積位姿變換,并用IMU修正,得到當(dāng)前幀到初始幀的累積位姿變換
發(fā)布話題并更新tf變換
一、main()函數(shù)以及回調(diào)函數(shù)
main()函數(shù)是很簡單的,就是定義了一系列的發(fā)布者和訂閱者,訂閱了來自scanRegistration節(jié)點發(fā)布的話題;然后定義了一個tf發(fā)布器,發(fā)布當(dāng)前幀(/laser_odom)到初始幀(/camera_init)的坐標(biāo)變換;然后定義了一些列下面會用到的變量。
其中有6個訂閱者,分別看一下它們的回調(diào)函數(shù)。
intmain(intargc,char**argv)
{
ros::init(argc,argv,"laserOdometry");
ros::NodeHandlenh;
ros::SubscribersubCornerPointsSharp=nh.subscribe
("/laser_cloud_sharp",2,laserCloudSharpHandler);
ros::SubscribersubCornerPointsLessSharp=nh.subscribe
("/laser_cloud_less_sharp",2,laserCloudLessSharpHandler);
ros::SubscribersubSurfPointsFlat=nh.subscribe
("/laser_cloud_flat",2,laserCloudFlatHandler);
ros::SubscribersubSurfPointsLessFlat=nh.subscribe
("/laser_cloud_less_flat",2,laserCloudLessFlatHandler);
ros::SubscribersubLaserCloudFullRes=nh.subscribe
("/velodyne_cloud_2",2,laserCloudFullResHandler);
ros::SubscribersubImuTrans=nh.subscribe
("/imu_trans",5,imuTransHandler);
ros::PublisherpubLaserCloudCornerLast=nh.advertise
("/laser_cloud_corner_last",2);
ros::PublisherpubLaserCloudSurfLast=nh.advertise
("/laser_cloud_surf_last",2);
ros::PublisherpubLaserCloudFullRes=nh.advertise
("/velodyne_cloud_3",2);
ros::PublisherpubLaserOdometry=nh.advertise("/laser_odom_to_init",5);
nav_msgs::OdometrylaserOdometry;
laserOdometry.header.frame_id="/camera_init";
laserOdometry.child_frame_id="/laser_odom";
tf::TransformBroadcastertfBroadcaster;
tf::StampedTransformlaserOdometryTrans;
laserOdometryTrans.frame_id_="/camera_init";
laserOdometryTrans.child_frame_id_="/laser_odom";
std::vectorpointSearchInd;//搜索到的點序
std::vectorpointSearchSqDis;//搜索到的點平方距離
PointTypepointOri,pointSel;/*選中的特征點*/
PointTypetripod1,tripod2,tripod3;/*特征點的對應(yīng)點*/
PointTypepointProj;/*unused*/
PointTypecoeff;/*直線或平面的系數(shù)*/
//退化標(biāo)志
boolisDegenerate=false;
//P矩陣,預(yù)測矩陣,用來處理退化情況
cv::MatmatP(6,6,CV_32F,cv::all(0));
intframeCount=skipFrameNum;//skipFrameNum=1
ros::Raterate(100);
boolstatus=ros::ok();
接收特征點的回調(diào)函數(shù)
下面這五個回調(diào)函數(shù)的作用和代碼結(jié)構(gòu)都類似,都是接收scanRegistration發(fā)布的話題,分別接收了edge point、less edge point、planar point、less planar point、full cloud point(按scanID排列的全部點云)。
對于接收到點云之后都是如下操作:
記錄時間戳
保存到相應(yīng)變量中
濾除無效點
將接收標(biāo)志設(shè)置為true
voidlaserCloudSharpHandler(constsensor_msgs::PointCloud2ConstPtr&cornerPointsSharp2)
{
timeCornerPointsSharp=cornerPointsSharp2->header.stamp.toSec();
cornerPointsSharp->clear();
pcl::fromROSMsg(*cornerPointsSharp2,*cornerPointsSharp);
std::vectorindices;
pcl::removeNaNFromPointCloud(*cornerPointsSharp,*cornerPointsSharp,indices);
newCornerPointsSharp=true;
}
voidlaserCloudLessSharpHandler(constsensor_msgs::PointCloud2ConstPtr&cornerPointsLessSharp2)
{
timeCornerPointsLessSharp=cornerPointsLessSharp2->header.stamp.toSec();
cornerPointsLessSharp->clear();
pcl::fromROSMsg(*cornerPointsLessSharp2,*cornerPointsLessSharp);
std::vectorindices;
pcl::removeNaNFromPointCloud(*cornerPointsLessSharp,*cornerPointsLessSharp,indices);
newCornerPointsLessSharp=true;
}
voidlaserCloudFlatHandler(constsensor_msgs::PointCloud2ConstPtr&surfPointsFlat2)
{
timeSurfPointsFlat=surfPointsFlat2->header.stamp.toSec();
surfPointsFlat->clear();
pcl::fromROSMsg(*surfPointsFlat2,*surfPointsFlat);
std::vectorindices;
pcl::removeNaNFromPointCloud(*surfPointsFlat,*surfPointsFlat,indices);
newSurfPointsFlat=true;
}
voidlaserCloudLessFlatHandler(constsensor_msgs::PointCloud2ConstPtr&surfPointsLessFlat2)
{
timeSurfPointsLessFlat=surfPointsLessFlat2->header.stamp.toSec();
surfPointsLessFlat->clear();
pcl::fromROSMsg(*surfPointsLessFlat2,*surfPointsLessFlat);
std::vectorindices;
pcl::removeNaNFromPointCloud(*surfPointsLessFlat,*surfPointsLessFlat,indices);
newSurfPointsLessFlat=true;
}
//接收全部點
voidlaserCloudFullResHandler(constsensor_msgs::PointCloud2ConstPtr&laserCloudFullRes2)
{
timeLaserCloudFullRes=laserCloudFullRes2->header.stamp.toSec();
laserCloudFullRes->clear();
pcl::fromROSMsg(*laserCloudFullRes2,*laserCloudFullRes);
std::vectorindices;
pcl::removeNaNFromPointCloud(*laserCloudFullRes,*laserCloudFullRes,indices);
newLaserCloudFullRes=true;
}
接收/imu_trans消息這個回調(diào)函數(shù)主要是接受了scanRegistration中發(fā)布的自定義imu話題,包括當(dāng)前sweep點云數(shù)據(jù)的IMU起始角、終止角、由于加減速產(chǎn)生的位移和速度畸變,保存到相應(yīng)變量中。
//接收imu消息
voidimuTransHandler(constsensor_msgs::PointCloud2ConstPtr&imuTrans2)
{
timeImuTrans=imuTrans2->header.stamp.toSec();
imuTrans->clear();
pcl::fromROSMsg(*imuTrans2,*imuTrans);
//根據(jù)發(fā)來的消息提取imu信息
imuPitchStart=imuTrans->points[0].x;
imuYawStart=imuTrans->points[0].y;
imuRollStart=imuTrans->points[0].z;
imuPitchLast=imuTrans->points[1].x;
imuYawLast=imuTrans->points[1].y;
imuRollLast=imuTrans->points[1].z;
imuShiftFromStartX=imuTrans->points[2].x;
imuShiftFromStartY=imuTrans->points[2].y;
imuShiftFromStartZ=imuTrans->points[2].z;
imuVeloFromStartX=imuTrans->points[3].x;
imuVeloFromStartY=imuTrans->points[3].y;
imuVeloFromStartZ=imuTrans->points[3].z;
newImuTrans=true;
}
二、特征匹配
2.1 初始化
接收到第一幀點云數(shù)據(jù)時,先進行一次初始化,因為第一幀點云沒法匹配..
這里就是直接把這一幀點云發(fā)送給laserMapping節(jié)點。
//初始化:將第一個點云數(shù)據(jù)集發(fā)送給laserMapping,從下一個點云數(shù)據(jù)開始處理
if(!systemInited){
//將cornerPointsLessSharp與laserCloudCornerLast交換,目的保存cornerPointsLessSharp的值到laserCloudCornerLast中下輪使用
pcl::PointCloud::PtrlaserCloudTemp=cornerPointsLessSharp;
cornerPointsLessSharp=laserCloudCornerLast;
laserCloudCornerLast=laserCloudTemp;
//將surfPointLessFlat與laserCloudSurfLast交換,目的保存surfPointsLessFlat的值到laserCloudSurfLast中下輪使用
laserCloudTemp=surfPointsLessFlat;
surfPointsLessFlat=laserCloudSurfLast;
laserCloudSurfLast=laserCloudTemp;
//使用上一幀的特征點構(gòu)建kd-tree
kdtreeCornerLast->setInputCloud(laserCloudCornerLast);//所有的邊沿點集合
kdtreeSurfLast->setInputCloud(laserCloudSurfLast);//所有的平面點集合
//將cornerPointsLessSharp和surfPointLessFlat點也即邊沿點和平面點分別發(fā)送給laserMapping
sensor_msgs::PointCloud2laserCloudCornerLast2;
pcl::toROSMsg(*laserCloudCornerLast,laserCloudCornerLast2);
laserCloudCornerLast2.header.stamp=ros::Time().fromSec(timeSurfPointsLessFlat);
laserCloudCornerLast2.header.frame_id="/camera";
pubLaserCloudCornerLast.publish(laserCloudCornerLast2);
sensor_msgs::PointCloud2laserCloudSurfLast2;
pcl::toROSMsg(*laserCloudSurfLast,laserCloudSurfLast2);
laserCloudSurfLast2.header.stamp=ros::Time().fromSec(timeSurfPointsLessFlat);
laserCloudSurfLast2.header.frame_id="/camera";
pubLaserCloudSurfLast.publish(laserCloudSurfLast2);
//記住原點的翻滾角和俯仰角
transformSum[0]+=imuPitchStart;//IMU的y方向
transformSum[2]+=imuRollStart;//IMU的x方向
systemInited=true;
continue;
}
2.2 TransformToStart()函數(shù)
在scanRegistration模塊中,有一個TransformToStartIMU()函數(shù),上篇文章提到它的作用是:沒有對點云坐標(biāo)系進行變換,第i個點云依然處在里程計坐標(biāo)系下的curr時刻坐標(biāo)系中,只是對點云的位置進行調(diào)整。在這里推薦工坊新課:(第二期)徹底搞懂基于LOAM框架的3D激光SLAM:源碼剖析到算法優(yōu)化
而這個函數(shù)呢,就是要對點云的坐標(biāo)系進行變換,變換到里程計坐標(biāo)系下的初始時刻start坐標(biāo)系中,用于與上一幀的點云數(shù)據(jù)進行匹配。
在這個函數(shù)中,首先根據(jù)每個點強度值intensity,提取出scanRegistration中計算的插值系數(shù),下面開始了!
首先要明確:transform中保存的變量是上一幀相對于當(dāng)前幀的變換,也就是
而這里也體現(xiàn)了勻速運動假設(shè),因為我們在這里使用transform變量時,還沒有對其進行更新(迭代更新過程在特征匹配和非線性最小二乘優(yōu)化中才進行),所以這里使用的transform變量與上上幀相對于上一幀的變換相同,這也就是作者假設(shè)了每個掃描周期車輛都進行了完全相同的運動,用數(shù)學(xué)公式表示如下:
那么問題如下:
現(xiàn)在我們已知的量是:當(dāng)前時刻坐標(biāo)系下保持imustart角的的點云,上一幀相對于當(dāng)前幀的變換,也就是,使用s進行插值后有:。
需要求解的是當(dāng)前sweep初始時刻坐標(biāo)系的點云。
推導(dǎo)過程:
根據(jù)坐標(biāo)變換公式有:
而為YXZ變換順序(解釋:當(dāng)前幀相對于上一幀的變換順序為ZXY,呢么反過來,這里是上一幀相當(dāng)于當(dāng)前幀的變換,就變成了YXZ),所以,代入得:
這就推出了和代碼一致的變換順序:先減去,然后繞z周旋轉(zhuǎn)-rz,繞x軸旋轉(zhuǎn)-rx,繞y軸旋轉(zhuǎn)-ry。
//將該次sweep中每個點通過插值,變換到初始時刻start voidTransformToStart(PointTypeconst*constpi,PointType*constpo) { //插值系數(shù)計算,云中每個點的相對時間/點云周期10 floats=10*(pi->intensity-int(pi->intensity)); //線性插值:根據(jù)每個點在點云中的相對位置關(guān)系,乘以相應(yīng)的旋轉(zhuǎn)平移系數(shù) //這里的transform數(shù)值上和上次一樣,這里體現(xiàn)了勻速運動模型,就是每次時間間隔下,相對于上一次sweep的變換都是一樣的 //而在使用該函數(shù)之前進行了一次操作:transform[3]-=imuVeloFromStartX*scanPeriod; //這個操作是在勻速模型的基礎(chǔ)上,去除了由于加減速造成的畸變 //R_curr_start=R_YXZ floatrx=s*transform[0]; floatry=s*transform[1]; floatrz=s*transform[2]; floattx=s*transform[3]; floatty=s*transform[4]; floattz=s*transform[5]; /*pi是在curr坐標(biāo)系下p_curr,需要變換到當(dāng)前sweep的初始時刻start坐標(biāo)系下 *現(xiàn)在有關(guān)系:p_curr=R_curr_start*p_start+t_curr_start *變換一下有:變換一下有:p_start=R_curr_start^{-1}*(p_curr-t_curr_start)=R_YXZ^{-1}*(p_curr-t_curr_start) *代入定義量:p_start=R_transform^{-1}*(p_curr-t_transform) *展開已知角:p_start=R_-ry*R_-rx*R_-rz*(p_curr-t_transform) */ //平移后繞z軸旋轉(zhuǎn)(-rz) floatx1=cos(rz)*(pi->x-tx)+sin(rz)*(pi->y-ty); floaty1=-sin(rz)*(pi->x-tx)+cos(rz)*(pi->y-ty); floatz1=(pi->z-tz); //繞x軸旋轉(zhuǎn)(-rx) floatx2=x1; floaty2=cos(rx)*y1+sin(rx)*z1; floatz2=-sin(rx)*y1+cos(rx)*z1; //繞y軸旋轉(zhuǎn)(-ry) po->x=cos(ry)*x2-sin(ry)*z2; po->y=y2; po->z=sin(ry)*x2+cos(ry)*z2; po->intensity=pi->intensity; }
2.2 edge point匹配
尋找匹配直線:
將該次sweep中每個點通過插值,變換到初始時刻start后,迭代五次時,重新查找最近點,相當(dāng)于每個匹配迭代優(yōu)化4次,A-LOAM代碼中的Ceres代碼的最大迭代次數(shù)為4。
然后先試用PCL中的KD-tree查找當(dāng)前點在上一幀中的最近鄰點,對應(yīng)論文中提到的j點,最近鄰在上一幀中的索引保存在pointSearchInd中,距離保存在pointSearchSqDis中。
kdtreeCornerLast->nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);
closestPointInd對應(yīng)論文中的j點,minPointInd2對應(yīng)論文中的l點
int closestPointInd = -1, minPointInd2 = -1;
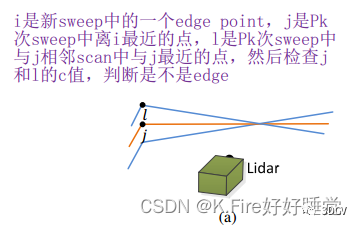
如果查找到了最近鄰的j點,就按照論文中所說,需要查找上一幀中,與j線號scanID相鄰且j的最近鄰點l,j和l構(gòu)成與待匹配點i的匹配直線edge。
下面這兩個for循環(huán)做了這么一件事情:向索引增大的方向查找(scanID>=j點的scanID),如果查找到了相鄰幀有距離更小的點,就更新最小距離和索引;然后向索引減小的方向查找(scanID<=j點的scanID),如果查找到了相鄰幀有距離更小的點,就更新最小距離和索引。然后將每個待匹配點對應(yīng)的j和l點的索引保存在pointSearchCornerInd1[]和pointSearchCornerInd2[]中。
計算直線參數(shù):
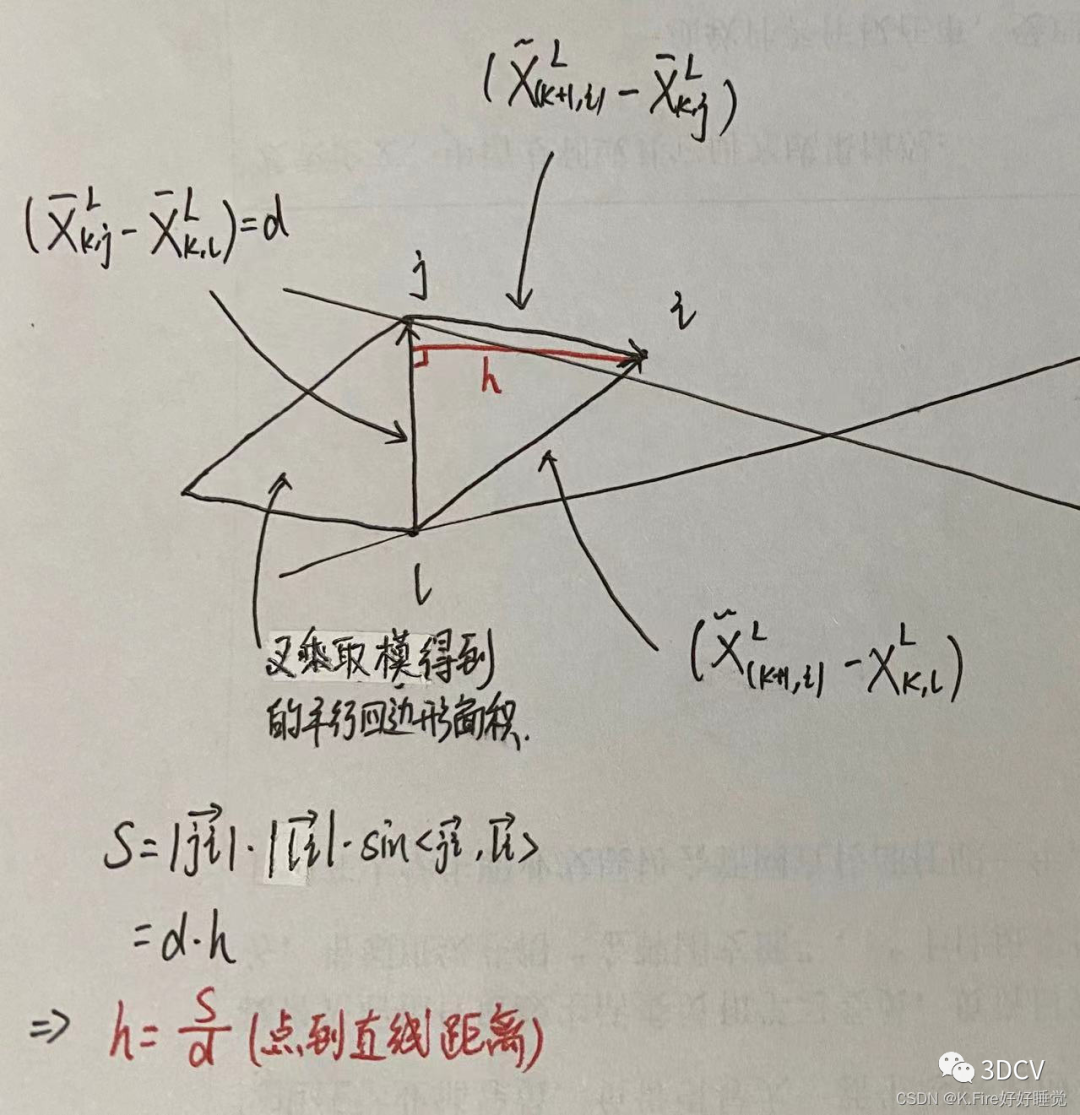
當(dāng)找到了j點和l點,就可以進行特征匹配,計算匹配直線的系數(shù),對應(yīng)論文中的公式為:
這個公式的分子是i和j構(gòu)成的向量與i和l構(gòu)成的向量的叉乘,得到了一個與ijl三點構(gòu)成平面垂直的向量,而叉乘取模其實就是一個平行四邊形面積;分母是j和l構(gòu)成的向量,取模后為平行四邊形面積的底,二者相除就得到了i到直線jl的距離,下面是圖示:
代碼中變量代表的含義:
x0:i點
x1:j點
x2:l點
a012:論文中殘差的分子(兩個向量的叉乘)
la、lb、lc:i點到j(luò)l線垂線方向的向量(jl方向的單位向量與ijl平面的單位法向量的叉乘得到)在xyz三個軸上的分量
ld2:點到直線的距離,即
下面這個s可以看做一個權(quán)重,距離越大權(quán)重越小,距離越小權(quán)重越大,得到的權(quán)重范圍<=1,其實就是在求解非線性最小二乘問題時的核函數(shù),s的本質(zhì)定義如下:
最后將權(quán)重大(>0.1)的,即距離比較小,且距離不為零的點放入laserCloudOri,對應(yīng)的直線系數(shù)放入coeffSel。
//論文中提到的Levenberg-Marquardt算法(L-Mmethod),其實是高斯牛頓算法
for(intiterCount=0;iterCountclear();
coeffSel->clear();
//處理當(dāng)前點云中的曲率最大的特征點,從上個點云中曲率比較大的特征點中找兩個最近距離點,一個點使用kd-tree查找,另一個根據(jù)找到的點在其相鄰線找另外一個最近距離的點
for(inti=0;ipoints[i],&pointSel);
//每迭代五次,重新查找最近點,相當(dāng)于每個匹配迭代優(yōu)化4次,ALOAM代碼中的Ceres代碼的最大迭代次數(shù)為4
if(iterCount%5==0){
std::vectorindices;
pcl::removeNaNFromPointCloud(*laserCloudCornerLast,*laserCloudCornerLast,indices);
//kd-tree查找一個最近距離點,邊沿點未經(jīng)過體素柵格濾波,一般邊沿點本來就比較少,不做濾波
kdtreeCornerLast->nearestKSearch(pointSel,1,pointSearchInd,pointSearchSqDis);
intclosestPointInd=-1,minPointInd2=-1;
//closestPointInd對應(yīng)論文中的j點,minPointInd2對應(yīng)論文中的l點
//循環(huán)是尋找相鄰線最近點l
//再次提醒:velodyne是2度一線,scanID相鄰并不代表線號相鄰,相鄰線度數(shù)相差2度,也即線號scanID相差2
if(pointSearchSqDis[0]points[closestPointInd].intensity);
floatpointSqDis,minPointSqDis2=25;//初始門檻值25米,可大致過濾掉scanID相鄰,但實際線不相鄰的值
//尋找距離目標(biāo)點最近距離的平方和最小的點
for(intj=closestPointInd+1;jpoints[j].intensity)>closestPointScan+2.5){//非相鄰線
break;
}
...
2.3 planar point匹配
尋找匹配平面:
將該次sweep中每個點通過插值,變換到初始時刻start后,迭代五次時,重新查找最近點,相當(dāng)于每個匹配迭代優(yōu)化4次,A-LOAM代碼中的Ceres代碼的最大迭代次數(shù)為4。
然后先試用PCL中的KD-tree查找當(dāng)前點在上一幀中的最近鄰點,對應(yīng)論文中提到的j點,最近鄰在上一幀中的索引保存在pointSearchInd中,距離保存在pointSearchSqDis中。
kdtreeCornerLast->nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);
closestPointInd對應(yīng)論文中的j點、minPointInd2對應(yīng)論文中的l點、minPointInd3對應(yīng)論文中的m點。
int closestPointInd = -1, minPointInd2 = -1, minPointInd3 = -1;
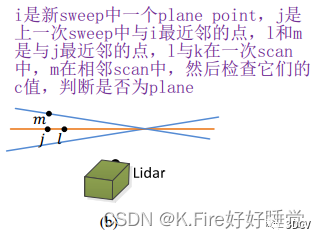
如果查找到了最近鄰的j點,就按照論文中所說,需要查找上一幀中,與j線號scanID相同且j的最近鄰點l,然后查找一個與j線號scanID相鄰且最近鄰的點m。
下面這兩個for循環(huán)做了這么一件事情:向索引增大的方向查找(scanID>=j點的scanID),如果查找到了相鄰線號的點j和相同線號的點m,有距離更小的點,就更新最小距離和索引;然后向索引減小的方向查找(scanID<=j點的scanID),如果查找到了相鄰線號的點j和相同線號的點m,就更新最小距離和索引。然后將每個待匹配點對應(yīng)的j、l點、m點的索引保存在pointSearchSurfInd1[]、pointSearchSurfInd2[]和pointSearchSurfInd3[]中。
計算平面參數(shù):
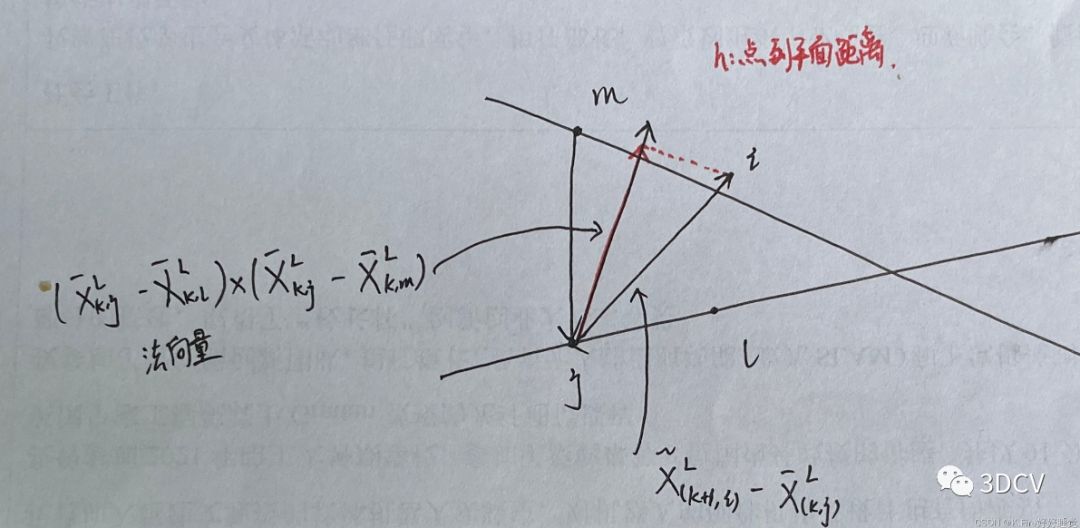
當(dāng)找到了j點、l點和m點,就可以進行特征匹配,計算匹配直線的系數(shù),對應(yīng)論文中的公式為:
這個公式的分母是一個lj向量和mj向量叉乘的形式,表示的是jlm平面的法向量的模;而分子是ij向量與jlm平面的法向量的向量積,向量積有一個意義是一個向量在另一個向量方向上的投影,這里就表示ij向量在jlm平面的法向量方向上的投影,也就是i到平面的距離,下面是圖示:
代碼中變量代表的含義:
tripod1:j點
tripod2:l點
tripod3:m點
pa、pb、pc:jlm平面的法向量在xyz三個軸上的分量,也可以理解為平面方程Ax+By+Cz+D=0的ABC系數(shù)
pd:為平面方程的D系數(shù)
ps:法向量的模
pd2:點到平面的距離(將平面方程的系數(shù)歸一化后,代入點的坐標(biāo),其實就是點到平面距離公式,即可得到點到平面的距離)
下面這個s可以看做一個權(quán)重,對應(yīng)于論文中的這一部分

距離越大權(quán)重越小,距離越小權(quán)重越大,得到的權(quán)重范圍<=1,其實就是在求解非線性最小二乘問題時的核函數(shù),s的本質(zhì)定義如下:
最后將權(quán)重大(>0.1)的,即距離比較小,且距離不為零的點放入laserCloudOri,對應(yīng)的平面系數(shù)放入coeffSel。
//對本次接收到的曲率最小的點,從上次接收到的點云曲率比較小的點中找三點組成平面,一個使用kd-tree查找,另外一個在同一線上查找滿足要求的,第三個在不同線上查找滿足要求的
for(inti=0;ipoints[i],&pointSel);
if(iterCount%5==0){
//kd-tree最近點查找,在經(jīng)過體素柵格濾波之后的平面點中查找,一般平面點太多,濾波后最近點查找數(shù)據(jù)量小
kdtreeSurfLast->nearestKSearch(pointSel,1,pointSearchInd,pointSearchSqDis);
//closestPointInd對應(yīng)論文中的j、minPointInd2對應(yīng)論文中的l、minPointInd3對應(yīng)論文中的m
intclosestPointInd=-1,minPointInd2=-1,minPointInd3=-1;
if(pointSearchSqDis[0]points[closestPointInd].intensity);
floatpointSqDis,minPointSqDis2=25,minPointSqDis3=25;
for(intj=closestPointInd+1;jpoints[j].intensity)>closestPointScan+2.5){
break;
}
...
三、高斯牛頓優(yōu)化
3.1 計算雅可比矩陣并求解增量
在代碼中,作者是純手推的高斯牛頓算法,這種方式相比于使用Ceres等工具,會提高運算速度,但是計算雅克比矩陣比較麻煩,需要清晰的思路和扎實的數(shù)學(xué)功底,下面我們一起來推導(dǎo)一下。
以edge point匹配為例,planar point是一樣的。
設(shè)誤差函數(shù)(點到直線的距離)為:
其中,X為待優(yōu)化變量,也就是transform[6]中存儲的變量,表示3軸旋轉(zhuǎn)rx、ry、rz和3軸平移量tx、ty、tz;D()表示兩點之間的距離,其計算公式為:
表示start時刻坐標(biāo)系下待匹配點i;表示start時刻坐標(biāo)系下點i到直線jl的垂點;另外根據(jù)之前TransformToStart()函數(shù)推導(dǎo)過的坐標(biāo)變換有:
根據(jù)鏈?zhǔn)椒▌t,f(x)對X求導(dǎo)有:
對其中每一項進行計算:
D對求導(dǎo)的結(jié)果其實就是 進行歸一化后的點到直線向量,它在xyz三個軸的分量就是前面求解出來的la、lb、lc變量。
用上面的結(jié)果,分別對rx,ry,rz,tx,ty,tz求導(dǎo),將得到的結(jié)果(3x6矩陣)再與D對求導(dǎo)的結(jié)果(1x3矩陣)相乘,就可以得到代碼中顯示的結(jié)果(1x6矩陣),分別賦值到matA的6個位置,matB是殘差項。
最后使用opencv的QR分解求解增量X即可。
//滿足要求的特征點至少10個,特征匹配數(shù)量太少棄用此幀數(shù)據(jù),不再進行優(yōu)化步驟 if(pointSelNumpoints[i]; coeff=coeffSel->points[i]; floats=1; floatsrx=sin(s*transform[0]); floatcrx=cos(s*transform[0]); floatsry=sin(s*transform[1]); floatcry=cos(s*transform[1]); floatsrz=sin(s*transform[2]); floatcrz=cos(s*transform[2]); floattx=s*transform[3]; floatty=s*transform[4]; floattz=s*transform[5]; floatarx=(-s*crx*sry*srz*pointOri.x+s*crx*crz*sry*pointOri.y+s*srx*sry*pointOri.z +s*tx*crx*sry*srz-s*ty*crx*crz*sry-s*tz*srx*sry)*coeff.x +(s*srx*srz*pointOri.x-s*crz*srx*pointOri.y+s*crx*pointOri.z +s*ty*crz*srx-s*tz*crx-s*tx*srx*srz)*coeff.y +(s*crx*cry*srz*pointOri.x-s*crx*cry*crz*pointOri.y-s*cry*srx*pointOri.z +s*tz*cry*srx+s*ty*crx*cry*crz-s*tx*crx*cry*srz)*coeff.z; floatary=((-s*crz*sry-s*cry*srx*srz)*pointOri.x +(s*cry*crz*srx-s*sry*srz)*pointOri.y-s*crx*cry*pointOri.z +tx*(s*crz*sry+s*cry*srx*srz)+ty*(s*sry*srz-s*cry*crz*srx) +s*tz*crx*cry)*coeff.x +((s*cry*crz-s*srx*sry*srz)*pointOri.x +(s*cry*srz+s*crz*srx*sry)*pointOri.y-s*crx*sry*pointOri.z +s*tz*crx*sry-ty*(s*cry*srz+s*crz*srx*sry) -tx*(s*cry*crz-s*srx*sry*srz))*coeff.z; floatarz=((-s*cry*srz-s*crz*srx*sry)*pointOri.x+(s*cry*crz-s*srx*sry*srz)*pointOri.y +tx*(s*cry*srz+s*crz*srx*sry)-ty*(s*cry*crz-s*srx*sry*srz))*coeff.x +(-s*crx*crz*pointOri.x-s*crx*srz*pointOri.y +s*ty*crx*srz+s*tx*crx*crz)*coeff.y +((s*cry*crz*srx-s*sry*srz)*pointOri.x+(s*crz*sry+s*cry*srx*srz)*pointOri.y +tx*(s*sry*srz-s*cry*crz*srx)-ty*(s*crz*sry+s*cry*srx*srz))*coeff.z; floatatx=-s*(cry*crz-srx*sry*srz)*coeff.x+s*crx*srz*coeff.y -s*(crz*sry+cry*srx*srz)*coeff.z; floataty=-s*(cry*srz+crz*srx*sry)*coeff.x-s*crx*crz*coeff.y -s*(sry*srz-cry*crz*srx)*coeff.z; floatatz=s*crx*sry*coeff.x-s*srx*coeff.y-s*crx*cry*coeff.z; floatd2=coeff.intensity; matA.at(i,0)=arx; matA.at (i,1)=ary; matA.at (i,2)=arz; matA.at (i,3)=atx; matA.at (i,4)=aty; matA.at (i,5)=atz; matB.at (i,0)=-0.05*d2; } cv::transpose(matA,matAt); matAtA=matAt*matA; matAtB=matAt*matB; //求解matAtA*matX=matAtB cv::solve(matAtA,matAtB,matX,cv::DECOMP_QR);
3.2 退化處理
代碼中使用的退化處理在Ji Zhang的這篇論文(《On Degeneracy of Optimization-based State Estimation Problems》)中有詳細(xì)論述。
簡單來說,作者認(rèn)為退化只可能發(fā)生在第一次迭代時,先對矩陣求特征值,然后將得到的特征值與閾值(代碼中為10)進行比較,如果小于閾值則認(rèn)為該特征值對應(yīng)的特征向量方向發(fā)生了退化,將對應(yīng)的特征向量置為0,然后按照論文中所述,計算一個P矩陣:
是原來的特征向量矩陣,是將退化方向置為0后的特征向量矩陣,然后用P矩陣與原來得到的解相乘,得到最終解:
if(iterCount==0){
//特征值1*6矩陣
cv::MatmatE(1,6,CV_32F,cv::all(0));
//特征向量6*6矩陣
cv::MatmatV(6,6,CV_32F,cv::all(0));
cv::MatmatV2(6,6,CV_32F,cv::all(0));
//求解特征值/特征向量
cv::eigen(matAtA,matE,matV);
matV.copyTo(matV2);
isDegenerate=false;
//特征值取值門檻
floateignThre[6]={10,10,10,10,10,10};
for(inti=5;i>=0;i--){//從小到大查找
if(matE.at(0,i)(i,j)=0;
}
isDegenerate=true;
}else{
break;
}
}
//計算P矩陣
matP=matV.inv()*matV2;//論文中對應(yīng)的Vf^-1*V_u`
}
if(isDegenerate){//如果發(fā)生退化,只使用預(yù)測矩陣P計算
cv::MatmatX2(6,1,CV_32F,cv::all(0));
matX.copyTo(matX2);
matX=matP*matX2;
}
3.3 迭代更新
最后進行迭代更新,如果更新量很小則終止迭代。
//累加每次迭代的旋轉(zhuǎn)平移量 transform[0]+=matX.at(0,0); transform[1]+=matX.at (1,0); transform[2]+=matX.at (2,0); transform[3]+=matX.at (3,0); transform[4]+=matX.at (4,0); transform[5]+=matX.at (5,0); for(inti=0;i<6;?i++){ ????????????if(isnan(transform[i]))//判斷是否非數(shù)字 ??????????????transform[i]=0; ??????????} ??????????//計算旋轉(zhuǎn)平移量,如果很小就停止迭代 ??????????float?deltaR?=?sqrt( ??????????????????????????????pow(rad2deg(matX.at (0,0)),2)+ pow(rad2deg(matX.at (1,0)),2)+ pow(rad2deg(matX.at (2,0)),2)); floatdeltaT=sqrt( pow(matX.at (3,0)*100,2)+ pow(matX.at (4,0)*100,2)+ pow(matX.at (5,0)*100,2)); if(deltaR
再次總結(jié)一下整個流程:
一共迭代25次,每次分為edge point和planar point兩個處理過程
每迭代5次時,重新尋找最近點
其他情況時,根據(jù)找到的最近點和待匹配點,計算匹配得到的直線和平面方程
根據(jù)計算匹配得到的直線和平面方程,計算雅可比矩陣,并求解迭代增量
如果是第一次迭代,判斷是否發(fā)生退化
更新迭代增量,并判斷終止條件
四、發(fā)布話題和坐標(biāo)變換
4.1 發(fā)布話題
這一部分首先獎transformSum更新為修正后的值,然后將歐拉角轉(zhuǎn)換成四元數(shù),發(fā)布里程計話題、廣播tf坐標(biāo)變換,然后將點云的曲率比較大和比較小的點投影到掃描結(jié)束位置;如果當(dāng)前幀特征點數(shù)量足夠多,就將其插入到KD-tree中用于下一次特征匹配;然后發(fā)布話題,發(fā)布的話題有:
/laser_cloud_corner_last:曲率較大的點--less edge point
/laser_cloud_surf_last:曲率較小的點--less planar point
/velodyne_cloud_3:全部點云--full cloud point
/laser_odom_to_init:里程計坐標(biāo)系下,當(dāng)前時刻end相對于初始時刻的坐標(biāo)變換
//得到世界坐標(biāo)系下的轉(zhuǎn)移矩陣 transformSum[0]=rx; transformSum[1]=ry; transformSum[2]=rz; transformSum[3]=tx; transformSum[4]=ty; transformSum[5]=tz; //歐拉角轉(zhuǎn)換成四元數(shù) geometry_msgs::QuaterniongeoQuat=tf::createQuaternionMsgFromRollPitchYaw(rz,-rx,-ry); //publish四元數(shù)和平移量 laserOdometry.header.stamp=ros::Time().fromSec(timeSurfPointsLessFlat); laserOdometry.pose.pose.orientation.x=-geoQuat.y; laserOdometry.pose.pose.orientation.y=-geoQuat.z; laserOdometry.pose.pose.orientation.z=geoQuat.x; laserOdometry.pose.pose.orientation.w=geoQuat.w; laserOdometry.pose.pose.position.x=tx; laserOdometry.pose.pose.position.y=ty; laserOdometry.pose.pose.position.z=tz; pubLaserOdometry.publish(laserOdometry); //廣播新的平移旋轉(zhuǎn)之后的坐標(biāo)系(rviz) laserOdometryTrans.stamp_=ros::Time().fromSec(timeSurfPointsLessFlat); laserOdometryTrans.setRotation(tf::Quaternion(-geoQuat.y,-geoQuat.z,geoQuat.x,geoQuat.w)); laserOdometryTrans.setOrigin(tf::Vector3(tx,ty,tz)); tfBroadcaster.sendTransform(laserOdometryTrans); //對點云的曲率比較大和比較小的點投影到掃描結(jié)束位置 intcornerPointsLessSharpNum=cornerPointsLessSharp->points.size(); for(inti=0;ipoints[i],&cornerPointsLessSharp->points[i]); } intsurfPointsLessFlatNum=surfPointsLessFlat->points.size(); for(inti=0;ipoints[i],&surfPointsLessFlat->points[i]); } frameCount++; //點云全部點,每間隔一個點云數(shù)據(jù)相對點云最后一個點進行畸變校正 if(frameCount>=skipFrameNum+1){//skipFrameNum=1 intlaserCloudFullResNum=laserCloudFullRes->points.size(); for(inti=0;ipoints[i],&laserCloudFullRes->points[i]); } } //畸變校正之后的點作為last點保存等下個點云進來進行匹配 pcl::PointCloud::PtrlaserCloudTemp=cornerPointsLessSharp; cornerPointsLessSharp=laserCloudCornerLast; laserCloudCornerLast=laserCloudTemp; laserCloudTemp=surfPointsLessFlat; surfPointsLessFlat=laserCloudSurfLast; laserCloudSurfLast=laserCloudTemp; laserCloudCornerLastNum=laserCloudCornerLast->points.size(); laserCloudSurfLastNum=laserCloudSurfLast->points.size(); //點足夠多就構(gòu)建kd-tree,否則棄用此幀,沿用上一幀數(shù)據(jù)的kd-tree if(laserCloudCornerLastNum>10&&laserCloudSurfLastNum>100){ kdtreeCornerLast->setInputCloud(laserCloudCornerLast); kdtreeSurfLast->setInputCloud(laserCloudSurfLast); } //按照跳幀數(shù)publich邊沿點,平面點以及全部點給laserMapping(每隔一幀發(fā)一次) if(frameCount>=skipFrameNum+1){ frameCount=0; sensor_msgs::PointCloud2laserCloudCornerLast2; pcl::toROSMsg(*laserCloudCornerLast,laserCloudCornerLast2); laserCloudCornerLast2.header.stamp=ros::Time().fromSec(timeSurfPointsLessFlat); laserCloudCornerLast2.header.frame_id="/camera"; pubLaserCloudCornerLast.publish(laserCloudCornerLast2); sensor_msgs::PointCloud2laserCloudSurfLast2; pcl::toROSMsg(*laserCloudSurfLast,laserCloudSurfLast2); laserCloudSurfLast2.header.stamp=ros::Time().fromSec(timeSurfPointsLessFlat); laserCloudSurfLast2.header.frame_id="/camera"; pubLaserCloudSurfLast.publish(laserCloudSurfLast2); sensor_msgs::PointCloud2laserCloudFullRes3; pcl::toROSMsg(*laserCloudFullRes,laserCloudFullRes3); laserCloudFullRes3.header.stamp=ros::Time().fromSec(timeSurfPointsLessFlat); laserCloudFullRes3.header.frame_id="/camera"; pubLaserCloudFullRes.publish(laserCloudFullRes3); } } status=ros::ok(); rate.sleep(); }
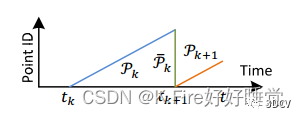
4.2 將點云變換到結(jié)束時刻end--TransformToEnd()函數(shù)
這里對應(yīng)于論文中體到的,變換到下圖所示的將變換到。
在勻速運動假設(shè)的前提下,從Start時刻到End時刻,點云都將保持imuRPYStart的位置姿態(tài),然后對其中里程計坐標(biāo)系下curr時刻的點進行以下操作:
1.首先進行了一個TransformToStart()函數(shù)的過程,將當(dāng)前點變換到里程計坐標(biāo)系下start時刻坐標(biāo)系下,得到x3、y3、z3:
2.然后變換到里程計坐標(biāo)系下end時刻坐標(biāo)系下,再次提醒,得到x6、y6、z6:
但是事實上,由于加減速情況的存在,會產(chǎn)生運動畸變,這就導(dǎo)致勻速運動假設(shè)不再成立,也就是End時刻的imuRPY角與Start時刻的imuRPY角不相等,需要使用IMU去除畸變。
3.上面的過程,總體上看的結(jié)果就是將所有點保持imuRPYStrat的姿態(tài),搬運到了雷達(dá)坐標(biāo)系下的end時刻,由于運動畸變的存在,下面要使用IMU進行去畸變,首先將所有點轉(zhuǎn)換到世界坐標(biāo)系下,但仍然是里程計坐標(biāo)系的end時刻,只是使用IMU進行了修正:
4.然后將所有點通過測量得到的imuRPYLast變換到全局(w)坐標(biāo)系下的當(dāng)前幀終止時刻,并且對應(yīng)了imuRPYLast姿態(tài)角:
我理解的這個過程如下:
//將上一幀點云中的點相對結(jié)束位置去除因勻速運動產(chǎn)生的畸變,效果相當(dāng)于得到在點云掃描結(jié)束位置靜止掃描得到的點云 voidTransformToEnd(PointTypeconst*constpi,PointType*constpo) { //插值系數(shù)計算 floats=10*(pi->intensity-int(pi->intensity)); //R_curr_start floatrx=s*transform[0]; floatry=s*transform[1]; floatrz=s*transform[2]; floattx=s*transform[3]; floatty=s*transform[4]; floattz=s*transform[5]; //將點curr系下的點,變換到初始時刻start //平移后繞z軸旋轉(zhuǎn)(-rz) floatx1=cos(rz)*(pi->x-tx)+sin(rz)*(pi->y-ty); floaty1=-sin(rz)*(pi->x-tx)+cos(rz)*(pi->y-ty); floatz1=(pi->z-tz); //繞x軸旋轉(zhuǎn)(-rx) floatx2=x1; floaty2=cos(rx)*y1+sin(rx)*z1; floatz2=-sin(rx)*y1+cos(rx)*z1; //繞y軸旋轉(zhuǎn)(-ry) floatx3=cos(ry)*x2-sin(ry)*z2; floaty3=y2; floatz3=sin(ry)*x2+cos(ry)*z2;//求出了相對于起始點校正的坐標(biāo) //R_end_start=R_YXZ rx=transform[0]; ry=transform[1]; rz=transform[2]; tx=transform[3]; ty=transform[4]; tz=transform[5]; //變換到end坐標(biāo)系 //繞y軸旋轉(zhuǎn)(ry) floatx4=cos(ry)*x3+sin(ry)*z3; floaty4=y3; floatz4=-sin(ry)*x3+cos(ry)*z3; //繞x軸旋轉(zhuǎn)(rx) floatx5=x4; floaty5=cos(rx)*y4-sin(rx)*z4; floatz5=sin(rx)*y4+cos(rx)*z4; //繞z軸旋轉(zhuǎn)(rz),再平移 floatx6=cos(rz)*x5-sin(rz)*y5+tx; floaty6=sin(rz)*x5+cos(rz)*y5+ty; floatz6=z5+tz; //使用IMU去除由于加減速產(chǎn)生的運動畸變,然后變換到全局(w)坐標(biāo)系下 //平移后繞z軸旋轉(zhuǎn)(imuRollStart) floatx7=cos(imuRollStart)*(x6-imuShiftFromStartX) -sin(imuRollStart)*(y6-imuShiftFromStartY); floaty7=sin(imuRollStart)*(x6-imuShiftFromStartX) +cos(imuRollStart)*(y6-imuShiftFromStartY); floatz7=z6-imuShiftFromStartZ; //繞x軸旋轉(zhuǎn)(imuPitchStart) floatx8=x7; floaty8=cos(imuPitchStart)*y7-sin(imuPitchStart)*z7; floatz8=sin(imuPitchStart)*y7+cos(imuPitchStart)*z7; //繞y軸旋轉(zhuǎn)(imuYawStart) floatx9=cos(imuYawStart)*x8+sin(imuYawStart)*z8; floaty9=y8; floatz9=-sin(imuYawStart)*x8+cos(imuYawStart)*z8; //然后變換到全局(w)坐標(biāo)系下的當(dāng)前幀終止時刻 //繞y軸旋轉(zhuǎn)(-imuYawLast) floatx10=cos(imuYawLast)*x9-sin(imuYawLast)*z9; floaty10=y9; floatz10=sin(imuYawLast)*x9+cos(imuYawLast)*z9; //繞x軸旋轉(zhuǎn)(-imuPitchLast) floatx11=x10; floaty11=cos(imuPitchLast)*y10+sin(imuPitchLast)*z10; floatz11=-sin(imuPitchLast)*y10+cos(imuPitchLast)*z10; //繞z軸旋轉(zhuǎn)(-imuRollLast) po->x=cos(imuRollLast)*x11+sin(imuRollLast)*y11; po->y=-sin(imuRollLast)*x11+cos(imuRollLast)*y11; po->z=z11; //只保留線號 po->intensity=int(pi->intensity); }總結(jié)
感覺如果去掉IMU的話,整個代碼就很清晰,但是加上IMU部分就很容易讓人懵逼。
編輯:黃飛
-
函數(shù)
+關(guān)注
關(guān)注
3文章
4417瀏覽量
67499 -
源代碼
+關(guān)注
關(guān)注
96文章
2953瀏覽量
70299 -
IMU
+關(guān)注
關(guān)注
6文章
416瀏覽量
47871
原文標(biāo)題:總結(jié)
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
【STM32分享】芯達(dá)stm32源代碼講解,輕松入門,附源代碼
坐標(biāo)變換的疑問
simulink中pmsm的數(shù)學(xué)模型及坐標(biāo)變換總結(jié)
【原創(chuàng)文章】電機矢量控制中坐標(biāo)變換的詳細(xì)推導(dǎo)
如何在Simulink中實現(xiàn)坐標(biāo)變換
PA043圖像文字識別SVM的技術(shù)源代碼和資料講解
ROI轉(zhuǎn)換的源代碼免費下載
3D激光SLAM,為什么要選LeGo-LOAM?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論