") AUTOSAR CP的復(fù)雜驅(qū)動(dòng)是什么
AUTOSAR CP的復(fù)雜驅(qū)動(dòng)是什么

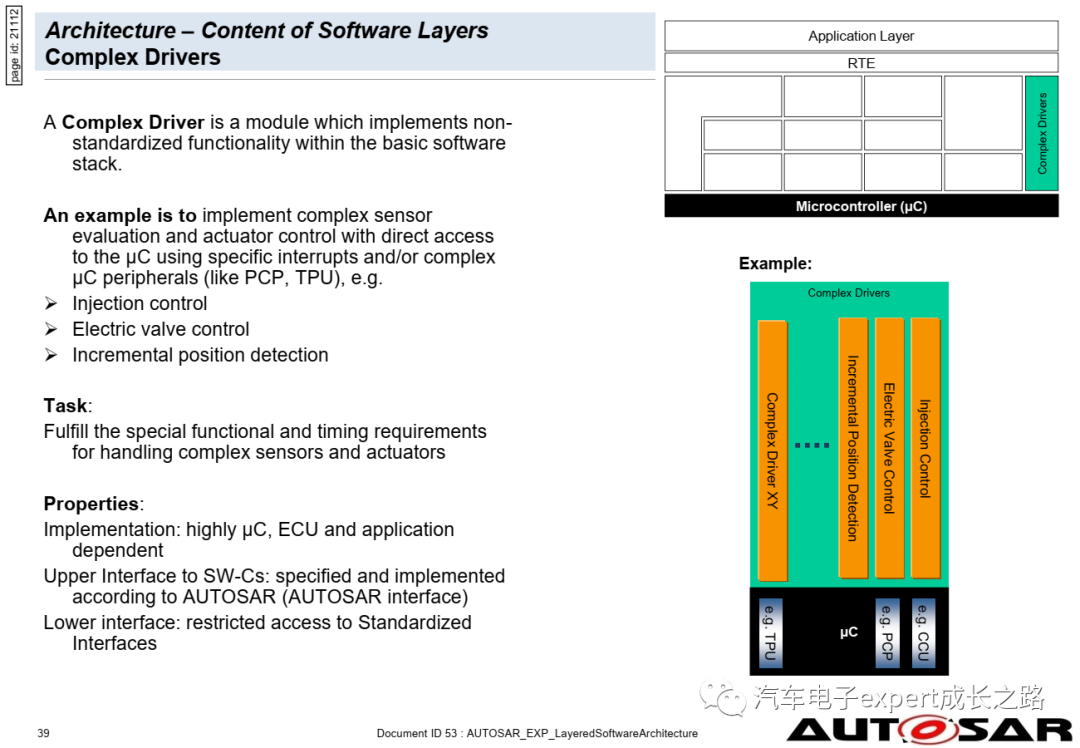
復(fù)雜驅(qū)動(dòng)(CDD)
AUTOSAR CP的復(fù)雜驅(qū)動(dòng)(CDD)是為了實(shí)現(xiàn)復(fù)雜的傳感器評(píng)估和執(zhí)行器控制而設(shè)計(jì)的。它通過(guò)直接訪問(wèn)微控制器來(lái)實(shí)現(xiàn),使用特定的中斷和/或復(fù)雜的微控制器外設(shè)、外部設(shè)備通信收發(fā)器、ASIC等,以滿足特殊的功能和時(shí)序要求。此外,CDD還可以用于實(shí)現(xiàn)增強(qiáng)的服務(wù)/協(xié)議或封裝非AUTOSAR系統(tǒng)的傳統(tǒng)功能。CDD的實(shí)現(xiàn)可能與應(yīng)用、微控制器和ECU有關(guān)。最后,CDD可以作為引入現(xiàn)有或新概念到AUTOSAR軟件架構(gòu)中的遷移機(jī)制。
在將CDD集成到AUTOSAR架構(gòu)中時(shí),設(shè)計(jì)人員應(yīng)考慮以下幾點(diǎn):
- 提供用戶手冊(cè),以便于集成和向客戶提供信息。
- 描述CDD的功能操作,包括初始化、正常運(yùn)行、關(guān)閉、故障操作等。
- 描述與其他BSW模塊、SchM和Rte的關(guān)系和需求,例如從NvM獲取的內(nèi)存塊、配置的臨界區(qū)等。
- 描述接口,包括服務(wù)的名稱、描述、可重入性、參數(shù)名稱、類(lèi)型、范圍、返回值名稱、類(lèi)型、范圍等。
- 描述非功能需求,如時(shí)序和行為要求、資源使用情況、與其他BSW模塊或SW-C的行為等。
- 描述Dem錯(cuò)誤、可選的Det錯(cuò)誤、調(diào)試變量等。
- 描述配置參數(shù)的名稱、類(lèi)型、范圍、值。
- 描述內(nèi)存映射需求,如Flash、RAM的使用情況。
- 描述使用限制和未解決的問(wèn)題。
- 描述與其他模塊的集成約束和要求。
- 提供示例。
CDD的實(shí)現(xiàn)需要遵守AUTOSAR的一些約束,包括:
- 遵守輸入規(guī)范。
- 使用SchM或操作系統(tǒng)機(jī)制來(lái)保護(hù)關(guān)鍵資源。
- 可通過(guò)EcuM和BswM模塊管理CDD的模式。
- 可使用內(nèi)存映射機(jī)制來(lái)處理內(nèi)存段。
- 可使用Det或Dem模塊報(bào)告錯(cuò)誤。
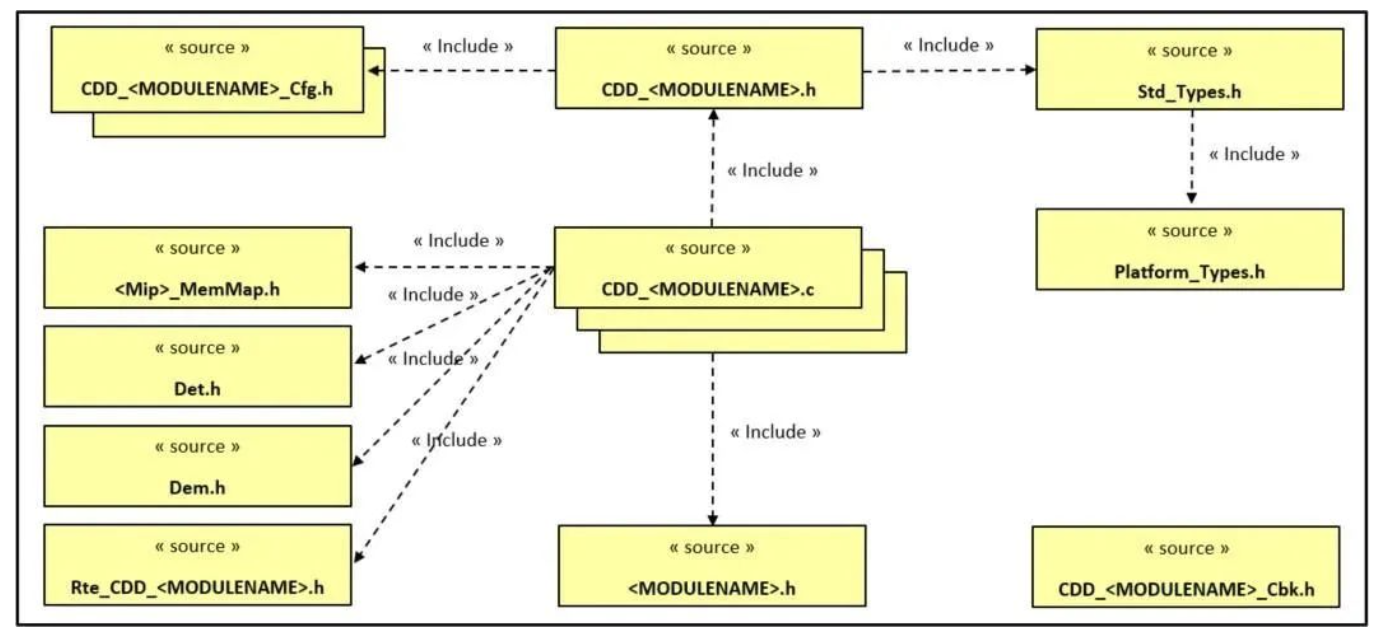
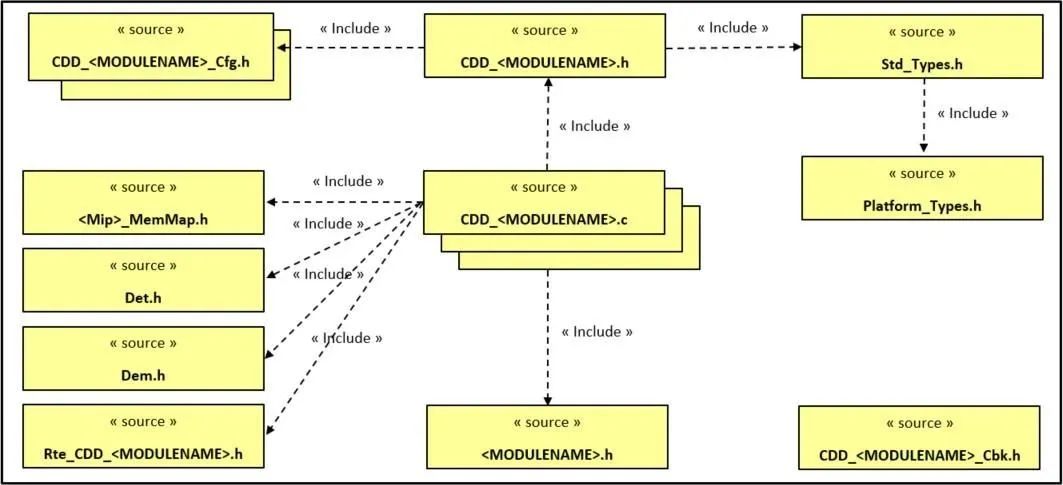
關(guān)于CDD的文件結(jié)構(gòu),建議至少提供以下文件:
- CDD_.c:CDD模塊的代碼文件。
- CDD__Irq.c:中斷函數(shù)的文件。
- CDD__Callout.c:回調(diào)函數(shù)的文件。
- CDD__Lcfg.c:鏈接時(shí)從配置生成的C對(duì)象的文件。
- CDD__PBcfg.c:構(gòu)建時(shí)從配置生成的C對(duì)象的文件。
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
mcu
+關(guān)注
關(guān)注
147文章
18924瀏覽量
398060 -
控制器
+關(guān)注
關(guān)注
114文章
17788瀏覽量
193105 -
驅(qū)動(dòng)
+關(guān)注
關(guān)注
12文章
1954瀏覽量
88522 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
398瀏覽量
23647 -
汽車(chē)
+關(guān)注
關(guān)注
15文章
4153瀏覽量
41095
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
復(fù)雜驅(qū)動(dòng)如何將現(xiàn)有的或新的概念引入AUTOSAR軟件架構(gòu)中的?
復(fù)雜驅(qū)動(dòng)(Complex Driver,CDD)是一種不受 AUTOSAR 標(biāo)準(zhǔn)化約束的軟件實(shí)體,它可以通過(guò) AUTOSAR 接口和/或基礎(chǔ)軟件模塊 API 進(jìn)行訪問(wèn)
TC397如何同時(shí)運(yùn)行CP Autosar OS和FreeRTOS?
TC397 如何同時(shí)運(yùn)行兩個(gè)不同的RTOS ,如FreeRTOS 和基于CP Autosar 的OS
發(fā)表于 01-24 08:31
CP AUTOSAR EcuM的相關(guān)資料下載
前言本系列請(qǐng)點(diǎn)擊:《搞一下CP AUTOSAR入門(mén)》所有系列請(qǐng)點(diǎn)擊:《汽車(chē)電子系列分享》在CP AUTOSAR架構(gòu)中定義了許多和模式管理相關(guān)的組件,其中主要包括EcuM、BswM、Co
發(fā)表于 02-11 07:05
AUTOSAR模式的FEE驅(qū)動(dòng)程序可以與其他非AUTOSAR模式兼容嗎?
我們正在使用 RTD 非 AUTOSAR mdoe 驅(qū)動(dòng)程序來(lái)開(kāi)發(fā)新項(xiàng)目。但是我們也想用AUTOSAR模式的FEE功能模塊來(lái)模擬EEPROM。我的問(wèn)題是 AUTOSAR 模式的 FEE
發(fā)表于 03-21 09:01
面向汽車(chē)應(yīng)用的AUTOSAR設(shè)計(jì)技巧
面向汽車(chē)應(yīng)用的AUTOSAR設(shè)計(jì)技巧
汽車(chē)OEM正在開(kāi)發(fā)基于AUTOSAR的電子系統(tǒng)以應(yīng)對(duì)當(dāng)代汽車(chē)中日益復(fù)雜的軟件。AUTOSAR簡(jiǎn)化了開(kāi)發(fā)流程并使得ECU軟件具有復(fù)用性。從200
發(fā)表于 01-15 10:46
?1407次閱讀
搞一下CP AUTOSAR 入門(mén) | 04 CP AUTOSAR EcuM 詳解
前言本系列請(qǐng)點(diǎn)擊:《搞一下CP AUTOSAR入門(mén)》所有系列請(qǐng)點(diǎn)擊:《汽車(chē)電子系列分享》在CP AUTOSAR架構(gòu)中定義了許多和模式管理相關(guān)的組件,其中主要包括EcuM、BswM、Co
發(fā)表于 12-07 18:21
?30次下載

CAN網(wǎng)絡(luò)管理規(guī)范 AUTOSAR CP中文版
CAN網(wǎng)絡(luò)管理規(guī)范 AUTOSAR CP中文版免費(fèi)下載。
發(fā)表于 04-06 16:21
?0次下載
AUTOSAR 解決方案 — INTEWORK-EAS-CP
服務(wù)和培訓(xùn)等各個(gè)方面的內(nèi)容,旨在為國(guó)內(nèi)及國(guó)際的OEM和供應(yīng)商提供穩(wěn)定可靠、便捷易用的AUTOSAR平臺(tái)。EAS共分為CP和AP兩個(gè)平臺(tái)。方案特點(diǎn)基于AUTOSAR標(biāo)準(zhǔn)

AUTOSAR解決方案 — INTEWORK-EAS-CP
概述隨著汽車(chē)電子技術(shù)的發(fā)展,汽車(chē)電子領(lǐng)域的嵌入式軟件規(guī)模越來(lái)越龐大,AUTOSAR的軟件架構(gòu)和方法論已被越來(lái)越多的OEM和供應(yīng)商認(rèn)可。在國(guó)外市場(chǎng),越來(lái)越多的AUTOSAR車(chē)型上市,各大OEM也已對(duì)其

AUTOSAR解決方案 — INTEWORK-EAS-CP
隨著汽車(chē)電子技術(shù)的發(fā)展,汽車(chē)電子領(lǐng)域的嵌入式軟件規(guī)模越來(lái)越龐大,AUTOSAR的軟件架構(gòu)和方法論已被越來(lái)越多的OEM和供應(yīng)商認(rèn)可。在國(guó)外市場(chǎng),越來(lái)越多的AUTOSAR車(chē)型上市,各大OEM也已對(duì)其
AUTOSAR解決方案 — INTEWORK-EAS-CP
隨著汽車(chē)電子技術(shù)的發(fā)展,汽車(chē)電子領(lǐng)域的嵌入式軟件規(guī)模越來(lái)越龐大,AUTOSAR的軟件架構(gòu)和方法論已被越來(lái)越多的OEM和供應(yīng)商認(rèn)可。在國(guó)外市場(chǎng),越來(lái)越多的AUTOSAR車(chē)型上市,各大OEM也已對(duì)其
解讀AUTOSAR模式管理BswM配置
模式管理是AUTOSAR中的一個(gè)難點(diǎn),也可以說(shuō)是最龐雜的一塊。因?yàn)槟J焦芾碡灤┱麄€(gè)CP Autosar流程,幾乎所有模塊都跟BSWM發(fā)生著聯(lián)系。

AUTOSAR經(jīng)典平臺(tái)介紹
經(jīng)典平臺(tái)(AUTOSAR CP) AUTOSAR經(jīng)典平臺(tái)(AUTOSAR CP)是AUTOSAR
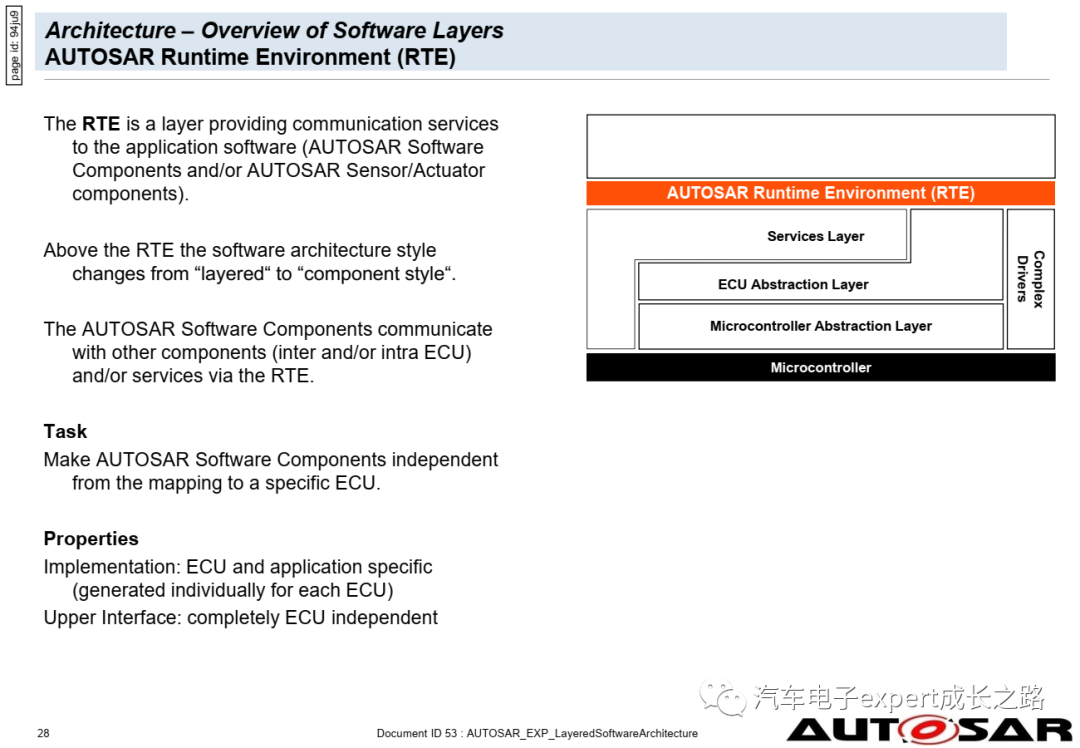
AUTOSAR CP運(yùn)行時(shí)環(huán)境與應(yīng)用軟件
運(yùn)行時(shí)環(huán)境(RTE) AUTOSAR CP運(yùn)行時(shí)環(huán)境(RTE)是AUTOSAR架構(gòu)中的核心組件,它實(shí)現(xiàn)了AUTOSAR虛擬功能總線(VFB)的接口,并提供了通信基礎(chǔ)設(shè)施和訪問(wèn)基礎(chǔ)軟件組
AUTOSAR架構(gòu)中復(fù)雜驅(qū)動(dòng)設(shè)計(jì)
復(fù)雜驅(qū)動(dòng)(Complex Driver,CDD)是一種不受 AUTOSAR 標(biāo)準(zhǔn)化約束的軟件實(shí)體,它可以通過(guò) AUTOSAR 接口和/或基礎(chǔ)軟件模塊 API 進(jìn)行訪問(wèn)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論