") CAN通信波特率不對會怎樣?
CAN通信波特率不對會怎樣?

CAN通信波特率不對會怎樣?
CAN通信是一種流行的通信協(xié)議,它廣泛應(yīng)用于許多現(xiàn)代車輛的系統(tǒng)中。CAN通信協(xié)議通過處理器之間的數(shù)據(jù)交換,實現(xiàn)車輛的控制。CAN通信協(xié)議的一項重要特性是其波特率控制,該波特率是處理器要進行通信所需的數(shù)據(jù)傳輸速率。波特率不正確將導(dǎo)致通信失敗,并可能導(dǎo)致危險的結(jié)果,因此正確的波特率設(shè)置是至關(guān)重要的。
CAN通信協(xié)議的波特率是指每秒鐘傳輸?shù)谋忍財?shù)。因此,如果波特率設(shè)置不正確,傳輸速率就會變得不穩(wěn)定,數(shù)據(jù)包可能會被丟失,處理器會收到無效的數(shù)據(jù)。這種無意義的數(shù)據(jù)可能會導(dǎo)致錯誤的車輛控制,造成意外的后果。系統(tǒng)的穩(wěn)定性也會受到影響,可能導(dǎo)致車輛系統(tǒng)不響應(yīng)、卡頓或崩潰等問題。
雖然CAN通信在處理數(shù)據(jù)傳輸方面非常快速和可靠,但波特率不正確也會嚴(yán)重影響其性能。例如,如果通信速率太慢,處理器可能會無法同步,導(dǎo)致傳輸失敗。如果通信速率太快,則會導(dǎo)致處理器發(fā)生溢出錯誤,這將導(dǎo)致數(shù)據(jù)丟失或出現(xiàn)數(shù)據(jù)損壞。
一些常見的問題可能會導(dǎo)致波特率設(shè)置不正確。例如,系統(tǒng)中的電氣干擾可能會導(dǎo)致機器讀取不準(zhǔn)確,并將頻率設(shè)置為過高或過低。同樣,壞電纜連接或無力驅(qū)動器可能會導(dǎo)致輸出波形不正確。在編寫系統(tǒng)時,需要對這些問題進行仔細(xì)而周密的考慮,以確保波特率正確設(shè)置,并確保通信通暢和可靠。
總之,CAN通信協(xié)議的波特率非常重要。如果波特率設(shè)置不正確,將導(dǎo)致通信失敗和危險的結(jié)果。因此,在設(shè)計車輛系統(tǒng)時,必須格外小心,確保波特率正確設(shè)置并在全程設(shè)備工作流程中的充當(dāng)一個可靠的基礎(chǔ)。
-
CAN通信
+關(guān)注
關(guān)注
5文章
105瀏覽量
18934 -
波特率
+關(guān)注
關(guān)注
2文章
320瀏覽量
35616
發(fā)布評論請先 登錄
碩博電子IO模塊修改波特率和節(jié)點ID操作步驟

FDCAN 數(shù)據(jù)段波特率增加后發(fā)送失敗的問題分析
支持小數(shù)波特率的意義是什么
UART波特率計算及UART收發(fā)回顯實驗

115200的波特率,為啥實際速度只有11KB/s?
如何測量CAN/CAN FD的位時間精度?

波特率是什么
可編程電源的通信波特率應(yīng)如何設(shè)置?
基于瑞薩64位MPU RZ/G2L的uboot串口多波特率支持介紹

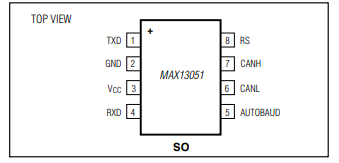
MAX13051 ±80V故障保護CAN收發(fā)器,具有自動波特率模式技術(shù)手冊



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論