 如何測量CAN/CAN FD的位時間精度?
如何測量CAN/CAN FD的位時間精度?

本文導讀
在CAN/CAN FD通信系統中,波特率的穩定程度是由系統振蕩器精度、PLL性能以及物理層傳輸特性共同影響的,波特率偏差可能會引入過多的重同步修正甚至導致采樣點落在非預期位置,從而影響系統的通信質量。在原理上波特率和位時間是互為倒數的關系,因此借助ZPS-CANFD設備的位時間測量與評估功能,有助于診斷總線隱含故障、優化系統及提升網絡性能。
在串行通信系統對設備要求的屬性中,波特率是最常見也是最重要的一組參數,這是決定著設備能否順利接入網絡的基本要求,應用位時間測量工具能測量實際通信過程的波特率數值;對于復雜的多節點系統,還能通過掃描不同報文的串行電平數據分別展示不同節點的位時間及其相對偏差,進一步地評估不同節點的位定時偏差情況,本文為CAN/CAN FD總線的設計與調試提供了理論參考與實踐指導。
位時間定義
波特率是異步串行通信中的重要參數,指每秒鐘能發送的數據位元數量,在原理上波特率和位時間是互為倒數的關系,即: 。
。
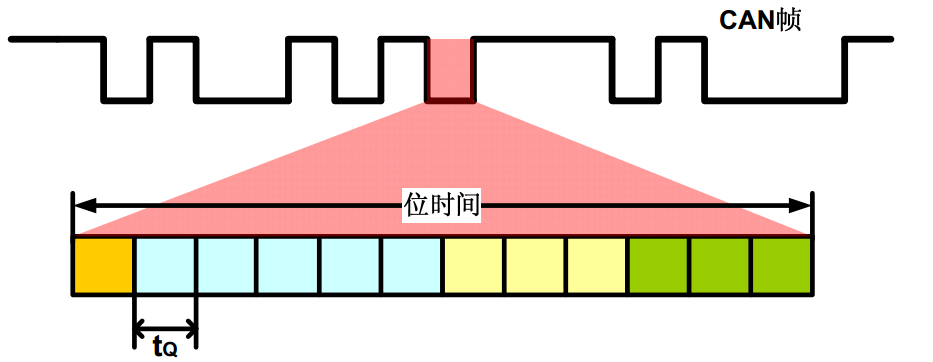
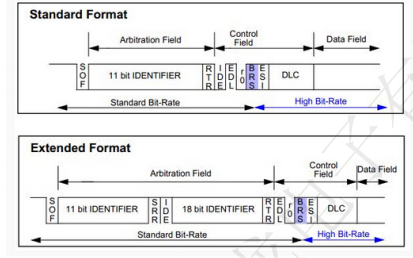
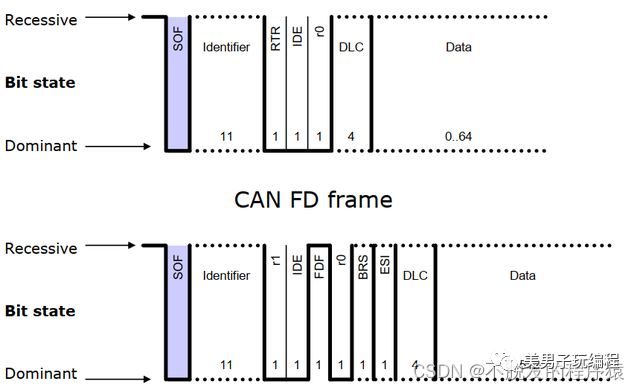
圖1 CAN位時間
CAN/CAN FD的位時間是基于一個自由運行的計數器,取自它的時鐘頻率,而它的時鐘頻率是經過系統時鐘頻率分頻(分頻系數BRP)而來的,假設系統時鐘頻率是8MHz,BRP是2,那么它的時鐘頻率就是4MHz,即 ,從圖?2可以看到,位時間有n個組成,那么根據的大小就可以計算出CAN/CAN FD的位時間了,即n。
,從圖?2可以看到,位時間有n個組成,那么根據的大小就可以計算出CAN/CAN FD的位時間了,即n。
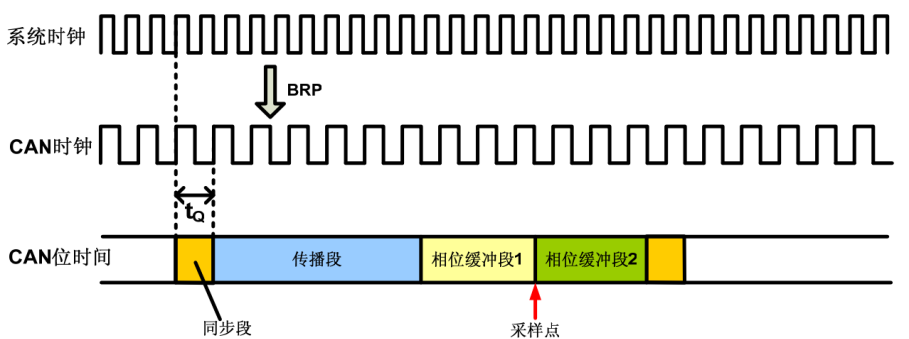
圖2 CAN/CAN FD位時間成份
位時間測量原理
ZPS的CAN總線位時間測量方法,以DUT作為發送節點,使用ZPS接收DUT發送的報文,然后通過對報文接收窗口或過濾窗口中報文對應的總線差分電壓數據(CANDIFF)波形,按照設定的測量區間進行仲裁域或數據域位時間的測量。
依據《GMW14241 JUL 2014》標準中對CAN/CAN FD總線位時間測量區間的要求,需按照圖 3 所示,從上升閾值為0.9V的位置開始測量20個位所經歷的時間,然后計算的平均值即為位時間結果。
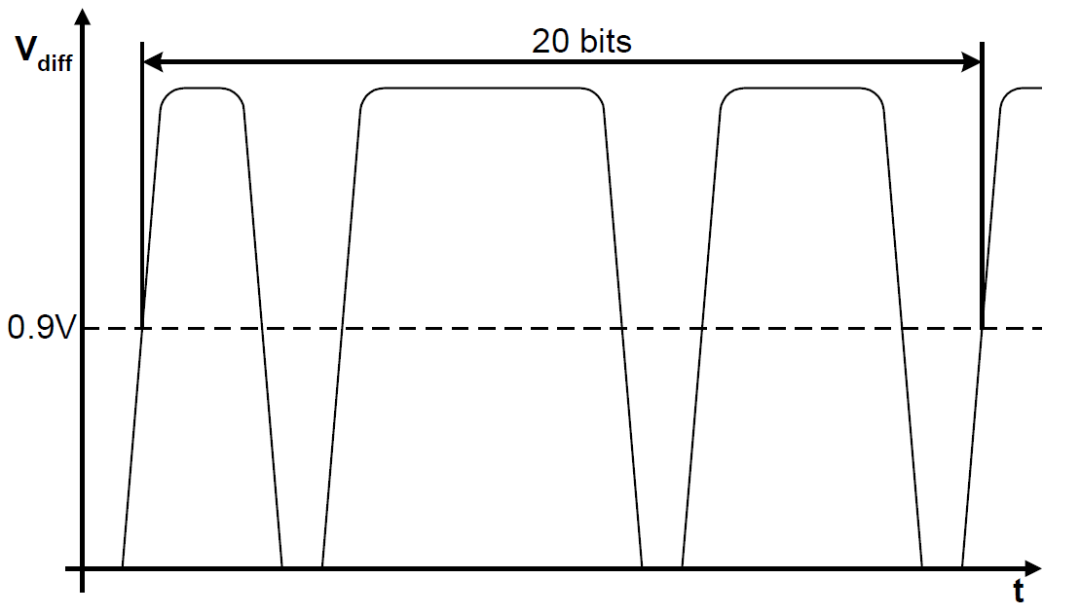
圖3 《GMW14241 JUL 2014》位時間測量區間要求
ZPS實測步驟
下面以實測某DUT仲裁域和數據域位時間(仲裁域波特率500k bps、采樣點80%,數據域波特率1M bps、采樣點80%)的步驟為例,進行相關的介紹。
第一步,將DUT的CAN FD信號和ZPS-CANFD的CAN1 OUT通道連接;
第二步,打開ZView軟件,點開【CAN1】通道參數設置界面,設置波特率、終端電阻、工作模式及采樣比等參數。將總線允許選擇為“ON”,點擊確認可直接將CAN1通道開啟。

圖4 CAN參數設置
注:1、總線上的終端電阻需確保是60Ω,否者會影響測量精度;
2、采樣比需設置到最大,否者會影響測量精度;
3、除變速CAN FD的位時間測量外,請確保設置中的數據域與仲裁域的波特率一致,以獲得最大的采樣比提升測量精度。
第三步,點擊【分析】菜單,打開【總線位時間測量】功能,然后選擇數據源、樣本數量、測量位置、測量對象及及區間,然后點擊“下一步”;
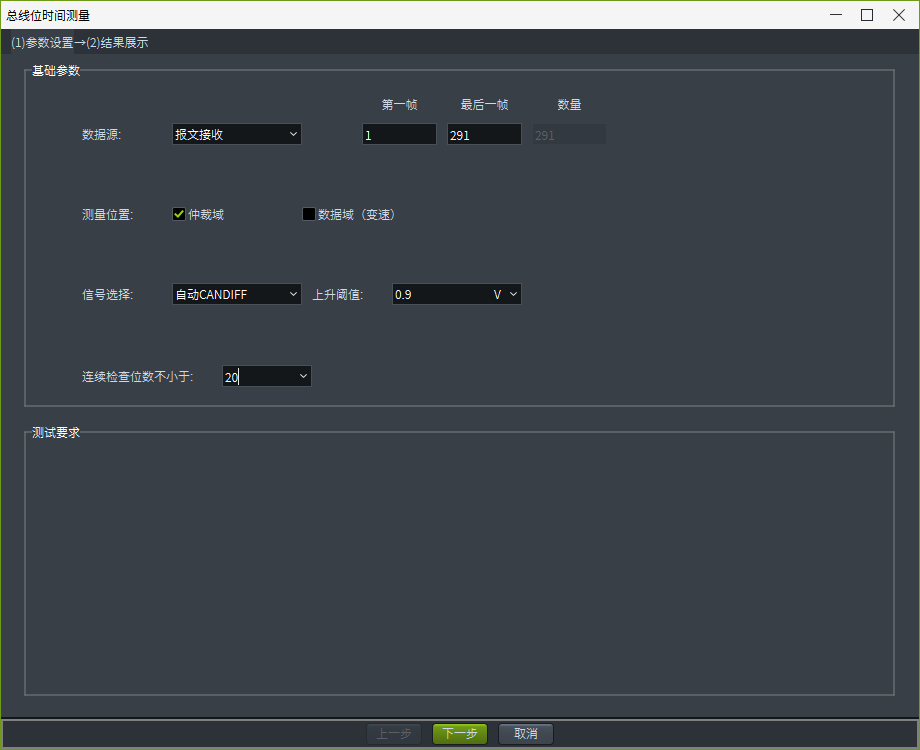
圖5 參數設置
第四步,進入到測量界面后,點擊“開始”按鈕,即可測量出仲裁域位時間和數據域位時間,結果如圖6所示。
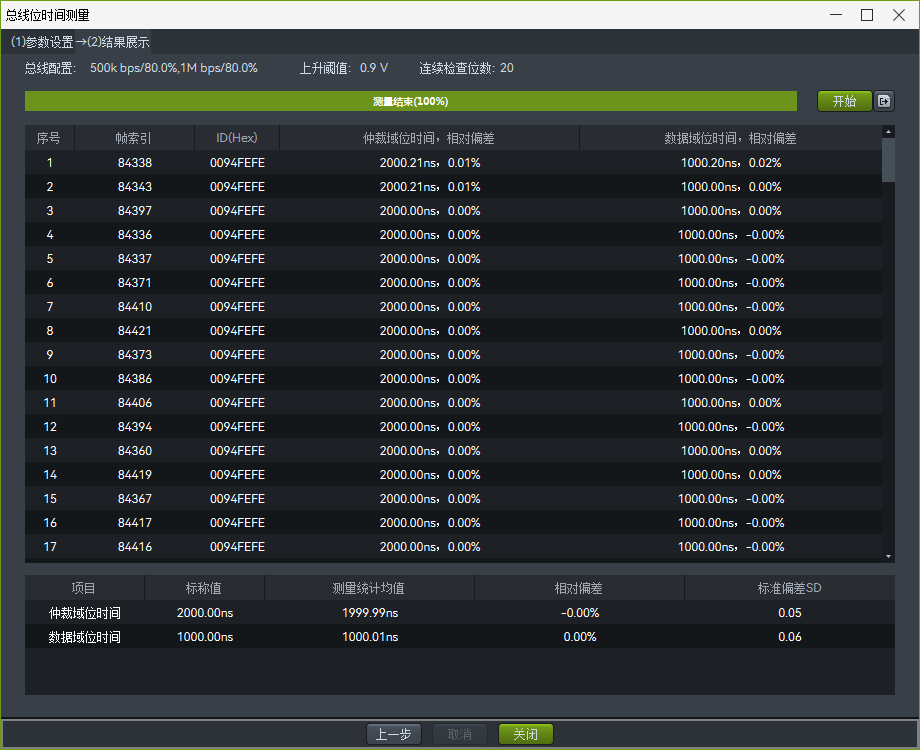
圖6 結果展示
注:1、傳統CAN的仲裁域和數據域位時間是等同的,測量界面上只顯示仲裁域位時間;
2、請確保被測幀對應域的比特位數量大于測量基本要求中的“連續檢查位數不小于”設置值。
總線位時間不符合預期排查建議
當總線位時間測量結果不符合預期時,我們可以從以下幾個方向進行排查:
1、被測設備的晶振精度原因,如選型不合適或晶振老化;
2、被測設備總線負載過高(電容過大、終端電阻偏低)、干擾等因素導致波形異常,進而影響了測量精度;
3、被測設備的CAN控制器的位時間參數配置不當。
-
振蕩器
+關注
關注
28文章
4188瀏覽量
143084 -
CAN
+關注
關注
59文章
3084瀏覽量
473177 -
通信系統
+關注
關注
6文章
1267瀏覽量
55207
發布評論請先 登錄
如何實現CAN到CAN FD的升級?
CAN FD協議介紹
CAN到CAN FD快速升級的實現方案
can總線一幀多少字節多少位_MCU擴展CAN/CAN FD接口方案MCP2518FD+ATA6563

STM32設備上的CAN FD
CAN與CAN FD如何解決彼此的通訊
可以混合使用Classical CAN格式和CAN FD格式的診斷報文嗎?
CAN FD是什么意思 優點有哪些
經典CAN網絡加入CAN FD節點需要注意什么?
如何使用DSLogic分析CAN/CAN-FD 信號?

CAN FD與傳統CAN的區別是什么




 工商網監
工商網監
評論