 電機驅動創新如何幫助解決機器人運動設計挑戰
電機驅動創新如何幫助解決機器人運動設計挑戰

從外科手術到在制造工廠舉起數千公斤的重量,機器人簡化了我們生活的許多方面。雖然機器人對我們現代世界的影響可能是顯而易見的,但你有沒有想過機器人系統是如何實現如此令人印象深刻的精確、快速和強大的運動的?如果你的答案是電機,你就對了!
機器人經常復制原本由人類執行的動作;出于這個原因,它的功能將包括某種形式的位移或旋轉,以調整位置和方向 - 通常通過電機實現的運動。
傳統用例專注于機械驅動,例如手臂操縱或傳送帶循環,現代用例就像旋轉相機或機械光束控制激光雷達傳感器一樣簡單。您可能會驚訝地發現,基本的風扇和泵是電機的基本應用,實際上對冷卻和液壓非常有用。
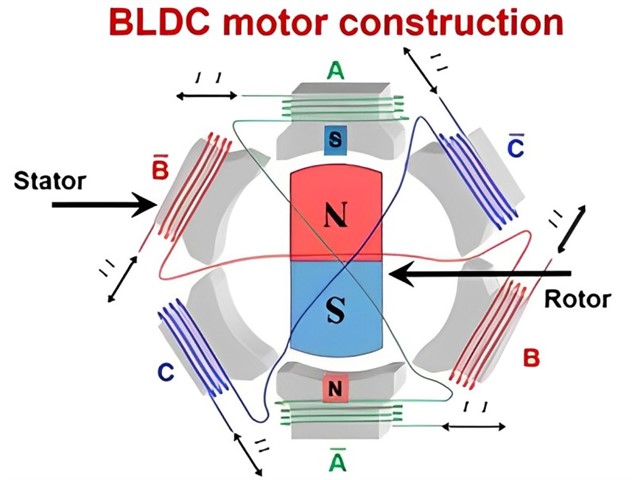
例如,機械臂關節中的無刷直流 (BLDC) 電機(如圖 1 所示)往往涉及旋轉的轉子和保持靜止的定子。施加電信號為定子上的線圈繞組通電會產生磁場,產生磁力,導致轉子移動,從而使機械臂內的關節旋轉。以正確的方式使用這些電信號,您的機械臂不僅會移動,還可以以特定的速度、定位精度和扭矩移動。
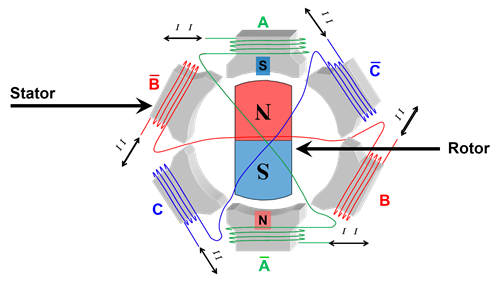
圖 1:BLDC 電機結構剖面圖
電機如何推動下一代機器人技術
除了涉及運動的精確和強大的任務外,微控制器(MCU)和集成電機驅動器等電機控制半導體的進步正在增強機器人的移動方式。讓我們來看看實現這一目標的四個具體挑戰。
挑戰1:提高安全要求以實現人機協作
傳統的安全考慮要求人與機器人嚴格分離,通常將機器人放在籠子里。由于進一步的自動化需要更緊密的協作和互動,協作機器人有助于提高生產力,但需要提供安全停止、安全速度、扭矩和運動控制的電機。
C2000
32 位 TMS320F28P650DK MCU 等器件在幫助實現安全要求方面發揮著至關重要的作用。這些器件可以集成用于診斷的安全外設,以簡化符合國際標準化組織 (ISO) 10218 的設計。在模擬端,DRV8353F等智能柵極驅動器可以通過TüV南德意志集團批準的技術報告幫助工程師實現其安全目標。本支持文檔指導工程師完成根據IEC 61800-5-2實現安全扭矩關閉所需的設計步驟。無論是MCU還是柵極驅動器,擁有某些組件都可以簡化設計過程,以實現功能安全的電機系統。
挑戰2:通過分布式電機架構減輕重量、布線和成本
電機電子設備正在從控制柜遷移到直接集成到機器人關節中,有助于減輕重量、布線和系統成本。這一趨勢促使元件制造商開發解決方案,在更小的集成電路封裝中實現更多的功能集成。空間限制還要求更高的功率密度和電源效率。
氮化鎵場效應晶體管(如LMG3422R050)具有集成柵極驅動器,可將功率級效率提高到99%以上,從而使集成電機減少或消除對散熱器的需求。使用MCU的系統(如TMS320F28065)可以產生分辨率為皮秒量級的脈寬調制信號,并具有實時通信外設和絕對編碼器接口。這些功能使得將布線從每個電機 10 多根電線減少到整個機器人手臂的兩線總線成為可能。除了優化功率密度和處理能力外,還可以通過以太網物理層收發器(如DP83TG721)添加單對以太網功能,從而在其系統中實現有線連接。
挑戰3:更高的精度和準確度,以自動執行精確的運動任務
產品小型化對許多應用的電機選擇(伺服、步進、BLDC)都有影響,并且電機控制和位置反饋的復雜性與這些較小的產品交互時實現精確運動。半導體創新正在實現支持小型化所需的更高精度。例如,電流傳感器(如AMC3306)具有±50μV偏移,并且還包括一個集成電源。將這些功能集成到一個封裝中,既可以提高控制環路的精度,又可以減小整體印刷電路板尺寸。
挑戰4:優化能效,實現電池供電的移動應用
機器人不僅固定在原地;機器人應用程序正在走向移動化,被部署以幫助自主交付包裹并安全地探索地形。當前和未來的傳感、處理和實時控制應用的半導體需要在高性能和能效之間取得平衡,以確保合理的電池壽命和可能的行程范圍。
實現電源效率不一定很復雜,也不需要采用具有多個分立元件的復雜設計方法。例如,像MCT8316A這樣的單電機控制器可以通過減少機器人中耗電組件的數量來幫助有效地運行小型泵和風扇電機。高度集成的MCT8316A包括六個金屬氧化物半導體場效應晶體管,用于形成一個用于提供電機電流的半橋功率級,以及一個用于簡單梯形電機控制的數字內核。
電機控制的下一步是什么?
明天的機器人肯定會讓我們感到驚訝,輕松完成今天似乎不可能完成的任務 - 在海洋最深的海溝或未知的太空冒險中大量操作。新設計可能會采用越來越先進的傳感器,正如我們在采用激光雷達和超聲波技術時所看到的那樣。我們與機器人交流的方法甚至可能會改變,從過去的有線機器人到現在更面向軟件的解決方案。可訪問性的增強可以使機器人更可靠地通過語音、視覺表達甚至只是一個想法來控制。在此過程中,隨著機器人技術和應用的不斷發展,保持它們運轉的電機也必須不斷發展。
審核編輯 黃宇
-
驅動器
+關注
關注
54文章
9082瀏覽量
155493 -
機器人
+關注
關注
213文章
31073瀏覽量
222176 -
電機
+關注
關注
143文章
9590瀏覽量
154066 -
電機驅動
+關注
關注
60文章
1455瀏覽量
89464 -
BLDC
+關注
關注
219文章
923瀏覽量
100397
發布評論請先 登錄
電機驅動器創新如何助力應對機器人運動設計挑戰



 工商網監
工商網監
評論