") 如何實(shí)現(xiàn)厘米級(jí)高度定位
如何實(shí)現(xiàn)厘米級(jí)高度定位

一、背景
前文《衛(wèi)星定位技術(shù)學(xué)習(xí)筆記》已經(jīng)介紹了一下GNSS定位技術(shù),并簡單介紹了一下高精度定位技術(shù)。目前室外使用最廣泛的定位手段是GNSS定位,常規(guī)的GNSS定位精度約5、10米左右,無法滿足高精度場景的應(yīng)用,如何提升GNSS定位性能是亟待解決的問題。本文由淺入深剖析GNSS定位原理并介紹如何實(shí)現(xiàn)厘米級(jí)高度定位。
二、GNSS定位原理
1、GNSS基本概念
全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS:Global Navigation Satellite System)是一種以衛(wèi)星為基礎(chǔ)的無線電導(dǎo)航系統(tǒng),系統(tǒng)可提供時(shí)間/空間基準(zhǔn)和所有與位置信息相關(guān)的實(shí)時(shí)動(dòng)態(tài)信息,又稱天基系統(tǒng)。GNSS是否就是GPS?答案是否定的,GNSS包含了多個(gè)國家不同的星座系統(tǒng),主要有美國的GPS系統(tǒng),歐盟的伽利略系統(tǒng),俄羅斯的GLONASS系統(tǒng),中國的北斗系統(tǒng)等另外還有其他的些區(qū)域定位系統(tǒng),如日本QZSS等。
每個(gè)GNSS星座都是由空間星座部分、地面控制部分以及用戶設(shè)備部分組成,空間部分提供我們定位所需要的各種信息包括星歷(衛(wèi)星軌道參數(shù)等信息)、發(fā)射測(cè)距信號(hào)等;地面控制部分的主要作用是根據(jù)監(jiān)控到的GNSS觀測(cè)數(shù)據(jù),計(jì)算出衛(wèi)星的星歷和衛(wèi)星鐘的改造參數(shù),并反饋給衛(wèi)星,同時(shí)可以對(duì)衛(wèi)星進(jìn)行控制以及發(fā)布指令等;用戶設(shè)備通過接收衛(wèi)星信號(hào)并進(jìn)行一定的解算,可以獲得自身的位置和時(shí)間等信息。
2、GNSS定位基本原理
GNSS定位的基本原理是基于測(cè)距,即根據(jù)測(cè)量得到的衛(wèi)星與用戶設(shè)備之間的距離,計(jì)算用戶自身的位置。我們可以通過哪些信息來計(jì)算衛(wèi)星與用戶之間的距離?已知距離信息后需要與哪些信息結(jié)合才能夠計(jì)算出用戶自身的位置?
首先分析如何獲取衛(wèi)星與用戶之間的距離,接收機(jī)(即用戶設(shè)備,后續(xù)直接稱為接收機(jī))一般可以獲取到兩類距離測(cè)量信息,一類是偽距測(cè)量,一類是載波相位測(cè)量,下面分別說明。接收機(jī)可以根據(jù)一定的方法接收到衛(wèi)星發(fā)射的信號(hào)同時(shí)記錄當(dāng)前接收機(jī)的時(shí)間,衛(wèi)星發(fā)射時(shí)間是已知的,因此可以獲得信號(hào)在空間中傳播的時(shí)間,由于信號(hào)傳播速度為光速,因此測(cè)量得到的距離為pr稱為偽距,即pr不是真實(shí)的距離,有一定的誤差。
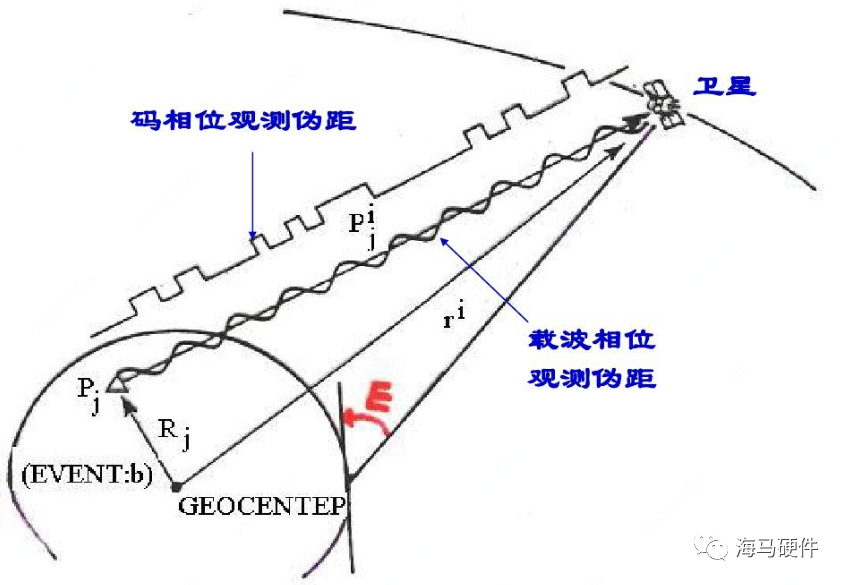
圖2偽距測(cè)量
另外一種距離信息是載波相位測(cè)距,載波相位測(cè)距不是基于信號(hào)空間傳播時(shí)間完成測(cè)量,而是利用了電磁波的相位周期性完成測(cè)量;由于GNSS信號(hào)是電磁波,相位具有周期性,因此真實(shí)的相位應(yīng)該是N個(gè)整周+一個(gè)非整周相位,非整周部分可以通過鎖相環(huán)精確獲得,而整周部分N不確定,需要通過其他手段確定,即Cp=(N+γ)*入,其中N為整周,γ一般是未知的,為非整周部分,λ為信號(hào)波長。
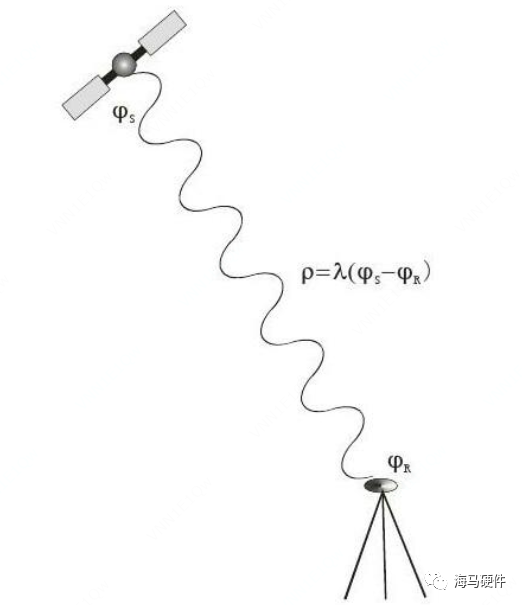
圖3 載波相位測(cè)距
載波相位測(cè)距與偽距有何區(qū)別?主要區(qū)別是精度不同,偽距精度一般是~1m,當(dāng)載波相位整周模糊度固定正確時(shí),精度為~0.001m,因此基于偽距定位精度一般是米級(jí),根據(jù)載波相位定位度可以達(dá)到cm級(jí)。
我們獲取到衛(wèi)星到接收機(jī)的距離時(shí),需要結(jié)合哪些信息計(jì)算接收機(jī)的位置呢?其實(shí)我們還有另外一個(gè)信息.星歷信息,根據(jù)星歷信息我們可以獲取到衛(wèi)星在各時(shí)刻的位詈及速度,結(jié)合衛(wèi)星位置以及衛(wèi)星與接收機(jī)之間的距離,通過最小二乘法或者擴(kuò)展卡爾曼濾波等方法可以確定接收機(jī)的位置。
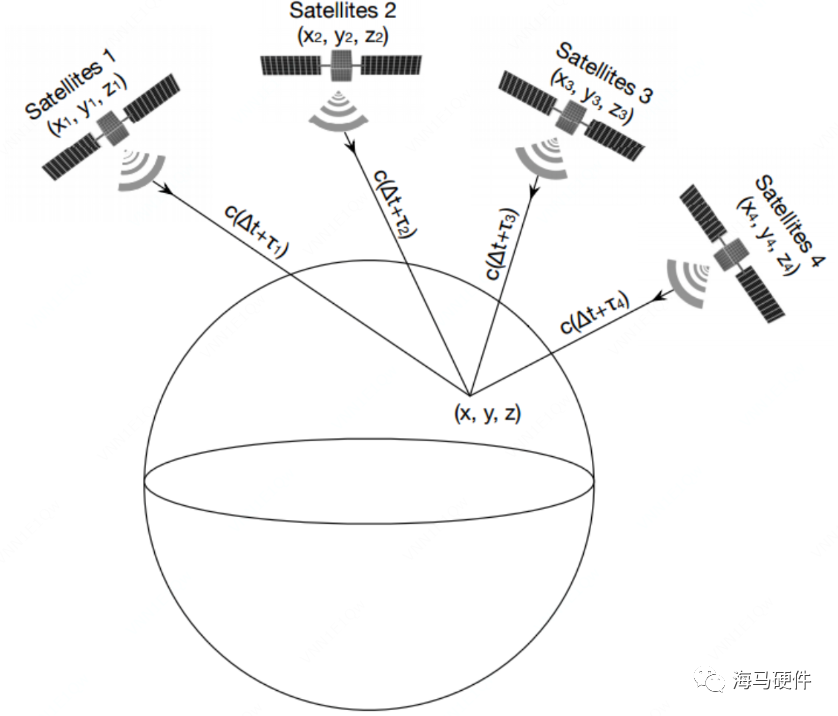
圖4GNSS定位基本原理
3、GNSS定位難點(diǎn)
如第2節(jié)所述,可以很簡單的計(jì)算出接收機(jī)的位置GNSS定位真的這么簡單嗎?我們?cè)敿?xì)看一下偽距測(cè)量以及載波測(cè)量有哪些誤差源:①GNSS時(shí)鐘與接收機(jī)不同步;②不同GNSS之間時(shí)鐘也不同步;③接收機(jī)時(shí)鐘一般存在漂移;④GNSS信號(hào)在傳幡過程中;會(huì)經(jīng)過大氣層和對(duì)流層,存在信號(hào)反射和折射,因此實(shí)際測(cè)距或者相位不是真實(shí)的距離;⑤接收機(jī)與衛(wèi)星之間可能存在多路徑效應(yīng),致接收到的信號(hào)不是直達(dá)信號(hào);⑥在很多地方只能收到極少數(shù)衛(wèi)星無法滿足定位需求;⑦部分地方GNSS信號(hào)完全被遮擋,無法完成定位。以上只列出了部分誤差源,實(shí)際情況可能會(huì)更復(fù)雜具體分類如下:
與衛(wèi)星有關(guān)的誤差:衛(wèi)星軌誤差,衛(wèi)星鐘差;
與傳幡途徑有關(guān)的誤差:電離層延遲,對(duì)流層延遲,多路徑效應(yīng)
與接收設(shè)備有關(guān)的誤差:接收機(jī)天線相位中心的偏移和變化,接收機(jī)鐘差等;
下圖以示意圖的方式列出了各誤差源:
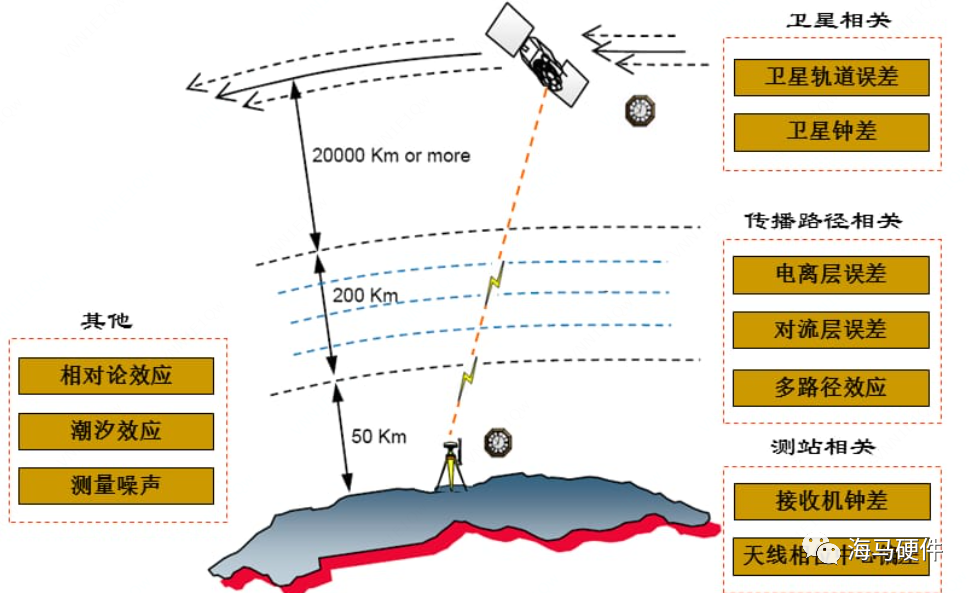
圖5 傳播過程中測(cè)距誤差
4、GNSS定位消除誤差方法
消除上述誤差一般有如下2種思路:①模型改正法:對(duì)誤差進(jìn)行建模估計(jì)并補(bǔ)償;②求差法:通過差分將特定的誤差、消除或減弱,根據(jù)如何消除這些誤差源,實(shí)時(shí)GNSS定位可以簡單分為單點(diǎn)定位、以及RTK定位。
單點(diǎn)定位直接根據(jù)測(cè)量得到的偽距信息完成定位,定位過程中對(duì)接收機(jī)鐘差進(jìn)行建模,部分算法會(huì)對(duì)電離層和對(duì)流層進(jìn)行建模,計(jì)算中采用廣播星歷精度較低,最終定位精度一般是米級(jí)。
PPP是精密單點(diǎn)定位,是采用精密星歷并對(duì)接收機(jī)和衛(wèi)星的鐘差、時(shí)鐘漂移、電離層,對(duì)流層進(jìn)行建模,從而實(shí)現(xiàn)較高精度定位,PPP定位度可達(dá)10cm,但是一般收斂時(shí)間較慢,需要30min以上。
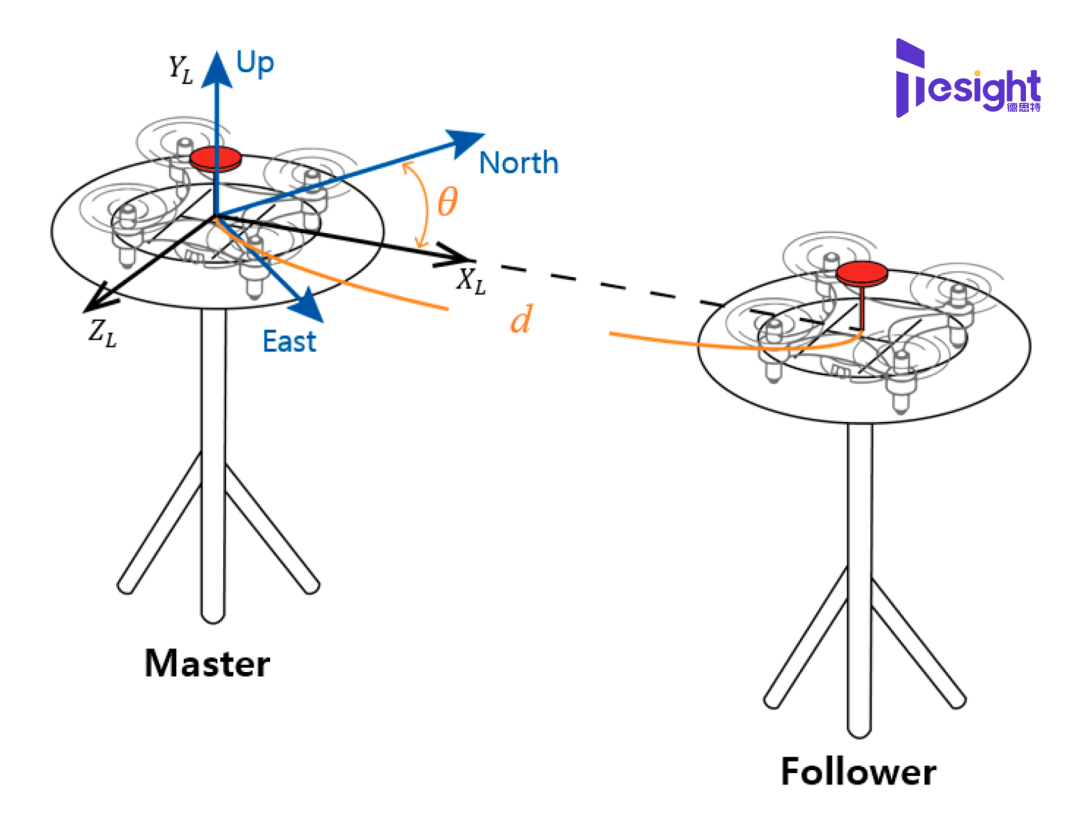
RTK是實(shí)時(shí)動(dòng)態(tài)定位,除了利用接收機(jī)收到信息,還用了差分基站的信息。差分站是一個(gè)位置精確已知的高精度接收機(jī),可以接收到與用戶接收機(jī)比較類似的GNSS信息,差分站接收到GNSS信號(hào)后,通過網(wǎng)絡(luò)傳輸給用戶接收機(jī),用戶接收機(jī)通過對(duì)自身接收的信號(hào)與差分站接收到的各信息作差,可以完全消除鐘差,衛(wèi)星軌道等參數(shù)影響,也可以削弱電離層和對(duì)流層的影響,為何是削弱而不是消除呢?因?yàn)榇颂幬覀兗僭O(shè)衛(wèi)星到用戶接收機(jī)的傳幡路徑中電離層與對(duì)流層特征,與衛(wèi)星到差分站接收機(jī)的傳播路徑中電離層和對(duì)流層特征一致,但是在實(shí)際場景中,二者不一致,但是比較接近,因此可以削弱電離層與對(duì)流層的影響。
差分定位意圖如下:包括站間差分、星間差分以及歷元間差分。
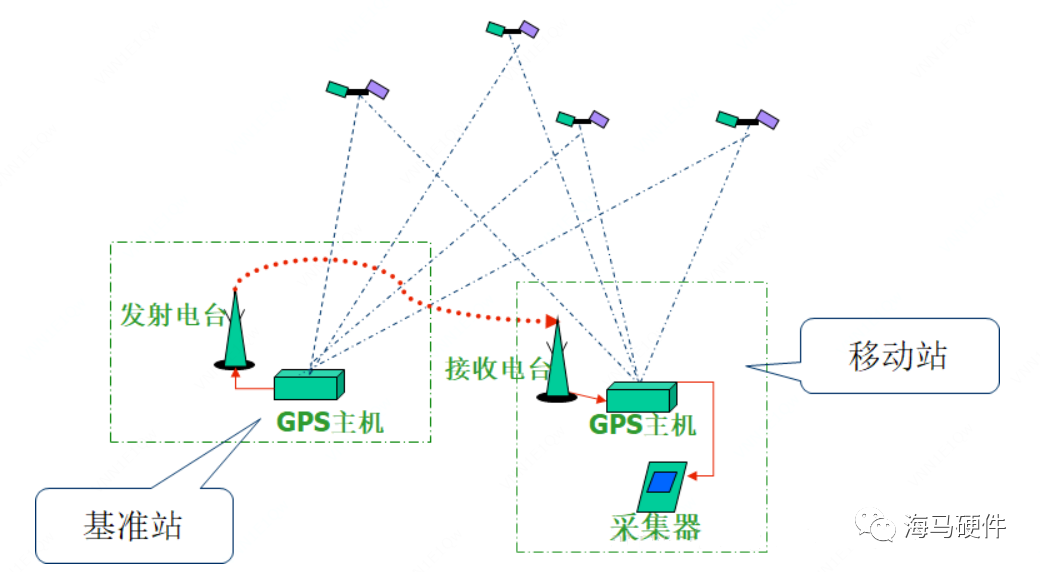
圖6差分定位示意圖
差分定位優(yōu)點(diǎn):①消除或減弱一些具有系統(tǒng)性誤差的影響;②減少平差計(jì)算中未知數(shù)的個(gè)數(shù)。差分定位缺點(diǎn):①原始獨(dú)立觀測(cè)量通過求差將引起差分量之間的相關(guān)性;②平差計(jì)算中,差分法將使觀測(cè)方程數(shù)明顯減少。
5、RTK算法基本原理
RTK算法是前最常用的GNSS高度定位技術(shù),在開闊場景下,定位度達(dá)cm級(jí),且在幾秒內(nèi)就可以完成。
上節(jié)我們介紹了測(cè)量誤差的修正,當(dāng)誤差修正后我們可以采用修正后的距離測(cè)量信息,計(jì)算定位結(jié)果,高精度定位必須采用載波相位進(jìn)行定位,但是載波相位存在整周模糊度問題,即必須精確已知整周模糊度才能夠獲取精確的定位結(jié)果,因此RTK算法的核心是整周模糊度固定。
理論上,整周模糊度N必須是整數(shù)但是我們根據(jù)最小二乘法或者卡爾曼濾波估計(jì)得到的N不是整數(shù),而是實(shí)數(shù),如何根據(jù)實(shí)數(shù)獲取到整數(shù)呢?最基本的方法是搜索即歷實(shí)數(shù)N附近的所有整數(shù),評(píng)估定位誤差選取誤差最小的整數(shù)組合即為真實(shí)的整周N。由于測(cè)量信息中存在載波相位和偽距,二者量測(cè)精度差異較大,導(dǎo)致整周模糊度搜索空間巨大,復(fù)雜度高,因此我們可以通過數(shù)據(jù)轉(zhuǎn)換,消除各參數(shù)之間的相關(guān)性,縮小搜索空間,從而提升算法效率,常用的方法有l(wèi)ambda等。如下圖所示:參數(shù)變換前后,搜索空間明顯減小。
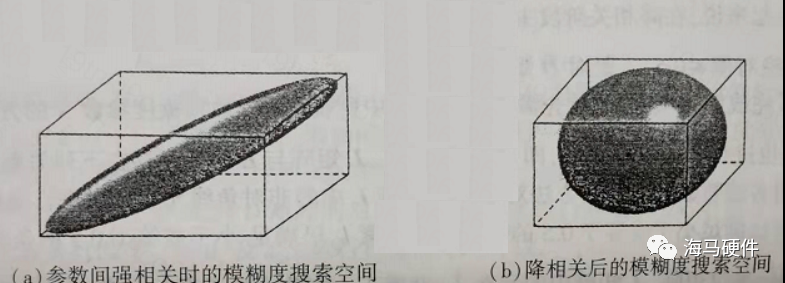
圖7 參數(shù)空間變換前后搜索空間對(duì)比
三、RTK算法缺點(diǎn)及改進(jìn)方法
RTK定位在較為開闊環(huán)境下定位可達(dá)厘米級(jí)性能滿足高定位要求,但是在復(fù)雜環(huán)境下定位性能無法保證,因此無法通過單獨(dú)依靠RTK完成全場景高精度,我們必須通過其他手段來提升定位精度,主要有以下幾個(gè)方案:1、通過大量歷史數(shù)據(jù)分析,直接優(yōu)化RTK算法;2、通過結(jié)合慣性傳感器,利用組合導(dǎo)航的優(yōu)勢(shì)提升定位性能;3、采用其他短離高度定位的方式,比如藍(lán)牙定位以及NFC定位等。
四、成果應(yīng)用及意義
高精度定位技術(shù)可以應(yīng)用于共享單車/電單車、無人機(jī)定位、自動(dòng)駕駛等領(lǐng)域。
審核編輯:彭菁
-
定位
+關(guān)注
關(guān)注
5文章
1587瀏覽量
36698 -
導(dǎo)航系統(tǒng)
+關(guān)注
關(guān)注
2文章
292瀏覽量
32035 -
GNSS
+關(guān)注
關(guān)注
9文章
990瀏覽量
51135 -
北斗系統(tǒng)
+關(guān)注
關(guān)注
0文章
52瀏覽量
13476
原文標(biāo)題:深度剖析GNSS高精度定位原理
文章出處:【微信號(hào):海馬硬件,微信公眾號(hào):海馬硬件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
“厘米級(jí)”定位的藍(lán)牙5.1核心標(biāo)準(zhǔn)已來,目前有哪些芯片可供選擇?
紐瑞芯UWB芯片厘米級(jí)精準(zhǔn)定位技術(shù)革命
“厘米級(jí)”gps定位預(yù)計(jì)2018年面世,無人駕駛汽車新時(shí)代將來臨
MaxCompute助力北斗大數(shù)據(jù),千尋位置3秒實(shí)現(xiàn)厘米級(jí)定位
UWB高精度厘米級(jí)定位方案
藍(lán)牙5.1厘米級(jí)定位主要應(yīng)用在哪些領(lǐng)域?
UWB厘米級(jí)室內(nèi)人員定位解決方案
厘米級(jí)藍(lán)牙AOA室內(nèi)定位解決方案
uwb高精度定位,實(shí)現(xiàn)厘米級(jí)定位感知
Java厘米級(jí)高精準(zhǔn)定位系統(tǒng)源碼(支持UWB、藍(lán)牙、WIFI定位)
精訊暢通發(fā)布RTK+4G定位模塊,開啟厘米級(jí)定位新時(shí)代
RTK技術(shù)揭秘:基線長度如何決定厘米級(jí)定位精度?
藍(lán)牙6.0,厘米級(jí)定位+超低功耗,你的設(shè)備該升級(jí)了!

思為無線UWB定位測(cè)距模塊簡介--厘米級(jí)精準(zhǔn)定位

云翎智能鐵路人員高精度工作記錄儀適配多場景厘米級(jí)定位解決方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論