") 自動(dòng)駕駛場(chǎng)景理解模塊
自動(dòng)駕駛場(chǎng)景理解模塊

場(chǎng)景理解
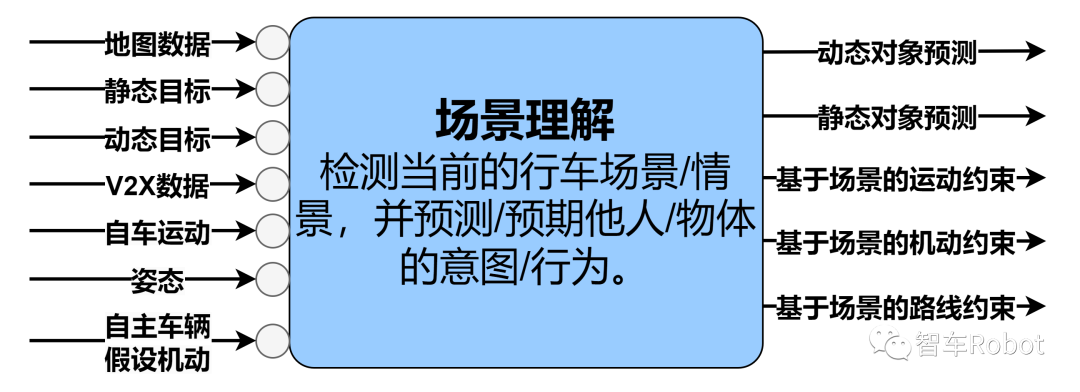
場(chǎng)景理解功能模塊圖場(chǎng)景理解功能模塊體現(xiàn)了負(fù)責(zé)“理解”當(dāng)前駕駛場(chǎng)景的算法。如果自主車輛要在共享的駕駛空間中進(jìn)行智能操縱,則有必要預(yù)測(cè)/預(yù)見(jiàn)該空間內(nèi)其他實(shí)體的行動(dòng)。場(chǎng)景或方案理解不僅僅是識(shí)別當(dāng)前情況的“狀態(tài)”,還包括對(duì)其演變方式的預(yù)測(cè)。
此功能模塊中的算法可能能夠模擬多種因果場(chǎng)景,以幫助為自主車輛選擇最佳行動(dòng)方案。然而,場(chǎng)景理解本身不會(huì)對(duì)自主車輛應(yīng)該采取的行動(dòng)做出任何決定,也不會(huì)選擇要模擬的行動(dòng)方案。
場(chǎng)景理解輸入:
?地圖數(shù)據(jù):提供當(dāng)前駕駛場(chǎng)景中基礎(chǔ)設(shè)施的布局。對(duì)預(yù)測(cè)其他道路使用者/實(shí)體的意圖/行為有用。
?靜態(tài)對(duì)象:識(shí)別駕駛場(chǎng)景中對(duì)自主車輛和其他道路實(shí)體可能占用的可行駛空間有影響的不可移動(dòng)對(duì)象。靜態(tài)對(duì)象可能具有動(dòng)態(tài)變化的狀態(tài),如交通燈變紅或收費(fèi)站變?yōu)殛P(guān)閉。
?動(dòng)態(tài)對(duì)象:用于預(yù)測(cè)當(dāng)前駕駛場(chǎng)景可能如何演變,主要關(guān)注動(dòng)態(tài)對(duì)象的軌跡和狀態(tài)變化。動(dòng)態(tài)對(duì)象的一個(gè)預(yù)測(cè)示例是車輛剛打開左轉(zhuǎn)燈然后左轉(zhuǎn)。
?V2X數(shù)據(jù):可能提供可以利用的信息來(lái)預(yù)見(jiàn)當(dāng)前駕駛場(chǎng)景的演變,如即將改變的交通燈。
?自車運(yùn)動(dòng):為預(yù)測(cè)引擎提供自主車輛自車運(yùn)動(dòng)信息。
?姿態(tài):允許預(yù)測(cè)引擎在地圖上放置自主車輛。
?自主車輛假設(shè)機(jī)動(dòng):為預(yù)測(cè)引擎提供自主車輛的假設(shè)機(jī)動(dòng)。這種機(jī)動(dòng)可能會(huì)引發(fā)其他道路使用者的反應(yīng),需要預(yù)測(cè)。例如,改道可能會(huì)強(qiáng)迫該車道上迎面而來(lái)的另一個(gè)道路使用者進(jìn)行危險(xiǎn)制動(dòng)。在行為規(guī)劃做出決定之前,可能會(huì)向場(chǎng)景理解功能模塊提交多個(gè)自主車輛機(jī)動(dòng)假設(shè)。
場(chǎng)景理解輸出:?動(dòng)態(tài)對(duì)象預(yù)測(cè):用于安全計(jì)劃改變自主車輛當(dāng)前軌跡。
?靜態(tài)對(duì)象預(yù)測(cè):用于安全計(jì)劃改變自主車輛當(dāng)前軌跡。
?基于場(chǎng)景的運(yùn)動(dòng)約束:根據(jù)駕駛場(chǎng)景條件約束自主車輛的運(yùn)動(dòng)。
?基于場(chǎng)景的機(jī)動(dòng)約束:根據(jù)駕駛場(chǎng)景條件約束自主車輛的計(jì)劃?rùn)C(jī)動(dòng)。
?基于場(chǎng)景的路線約束:根據(jù)駕駛場(chǎng)景對(duì)自主車輛的路線規(guī)劃加以約束。
?場(chǎng)景數(shù)據(jù):提供可以利用的集體駕駛條件視圖,以確保自主車輛在其設(shè)計(jì)參數(shù)內(nèi)運(yùn)行。
-
模塊
+關(guān)注
關(guān)注
7文章
2837瀏覽量
53283 -
汽車電子
+關(guān)注
關(guān)注
3045文章
8956瀏覽量
172796 -
車輛
+關(guān)注
關(guān)注
0文章
85瀏覽量
15826 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
793文章
14879瀏覽量
179788
發(fā)布評(píng)論請(qǐng)先 登錄
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
谷歌的自動(dòng)駕駛汽車是醬紫實(shí)現(xiàn)的嗎?
【話題】特斯拉首起自動(dòng)駕駛致命車禍,自動(dòng)駕駛的冬天來(lái)了?
自動(dòng)駕駛真的會(huì)來(lái)嗎?
自動(dòng)駕駛的到來(lái)
AI/自動(dòng)駕駛領(lǐng)域的巔峰會(huì)議—國(guó)際AI自動(dòng)駕駛高峰論壇
UWB主動(dòng)定位系統(tǒng)在自動(dòng)駕駛中的應(yīng)用實(shí)踐
如何讓自動(dòng)駕駛更加安全?
自動(dòng)駕駛汽車的處理能力怎么樣?
轉(zhuǎn)發(fā):聊聊邊緣計(jì)算在自動(dòng)駕駛中的應(yīng)用場(chǎng)景
自動(dòng)駕駛車的人車交互接口設(shè)計(jì)方案
自動(dòng)駕駛系統(tǒng)要完成哪些計(jì)算機(jī)視覺(jué)任務(wù)?
自動(dòng)駕駛系統(tǒng)設(shè)計(jì)及應(yīng)用的相關(guān)資料分享
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)
自動(dòng)駕駛汽車是如何進(jìn)行“場(chǎng)景理解”的?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論