") AUTOSAR中通信協(xié)議棧配置詳解
AUTOSAR中通信協(xié)議棧配置詳解

前言
通訊協(xié)議棧幾乎是CP AUTOSAR中最龐雜的一塊。由于其涉及的模塊比較多(僅實(shí)現(xiàn)CAN信號(hào)的收發(fā)就需要ECUC/CAN/CANIF/CANTP/PDUR/COM/XCP這么多模塊的協(xié)作!),且名詞概念眾多,入門很難。網(wǎng)絡(luò)上關(guān)于各個(gè)模塊的詳細(xì)介紹浩如煙海,其深度也讓人嘆為觀止。但沒(méi)有一篇文章把這些模塊串起來(lái)!
這就導(dǎo)致對(duì)于初學(xué)者來(lái)說(shuō),往往耐心的把各個(gè)模塊的詳細(xì)介紹都看完,甚至把AUTOSAR標(biāo)準(zhǔn)文檔讀完,依然不能建立一個(gè)全局的思路。導(dǎo)致在配置通訊協(xié)議棧時(shí)候,導(dǎo)入DBC之后,一看那么多錯(cuò)誤,無(wú)從下手或者解決了CANIF的錯(cuò)誤,PDUR又出現(xiàn)了新的錯(cuò)誤提示,解決了PDUR錯(cuò)誤,ECUC又報(bào)錯(cuò)...按下葫蘆浮起瓢,這種窘境,我相信絕對(duì)是每個(gè)AUTOSAR初學(xué)者都遇到過(guò)的。
本文試圖從一個(gè)全局的高度,自頂向下逐步細(xì)化開(kāi)來(lái)。讓你在建立全局觀之后熟悉通訊協(xié)議棧各模塊之間的關(guān)聯(lián)然后高屋建瓴學(xué)會(huì)配置每一項(xiàng)!也希望在此拋磚引玉,彼此交流心得,共同進(jìn)步。
1.DBC屬性與信號(hào)流
1.1 DBC屬性決定報(bào)文類型
不同的DBC屬性決定不同功能的報(bào)文, 一般實(shí)際項(xiàng)目中涉及的報(bào)文為4類:應(yīng)用報(bào)文,診斷報(bào)文,網(wǎng)絡(luò)管理報(bào)文,XCP報(bào)文。不同作用的報(bào)文其在協(xié)議棧中的信號(hào)流路徑是不同的。
參考Vector給出的《TechnicalReference_DbcRules_Vector》文檔,在DBC文件中對(duì)關(guān)鍵屬性Attributes的規(guī)定如下。
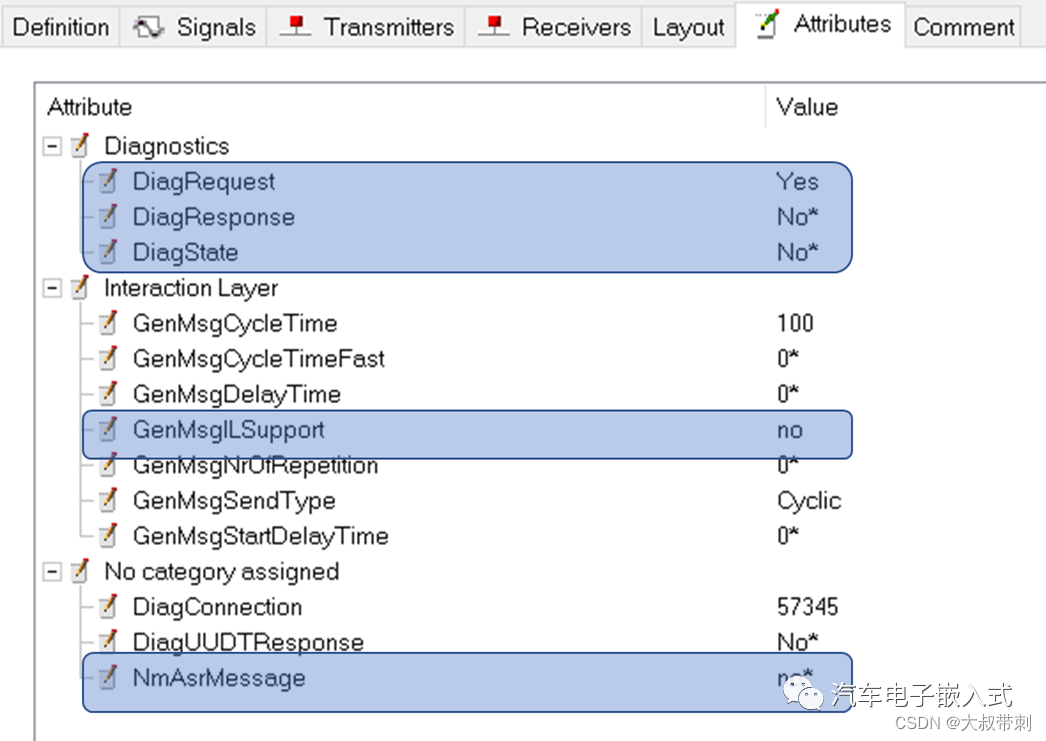
應(yīng)用報(bào)文:GenMsgILSupport:Yes
網(wǎng)絡(luò)管理報(bào)文Yes
XCP報(bào)文:
根據(jù)《TechnicalReference_DbcRules_Vector》規(guī)定只要Message中含有大寫XCP字樣,即可在導(dǎo)入DBC后被Vector的工具自動(dòng)識(shí)別為XCP報(bào)文。其他屬性同“應(yīng)用報(bào)文:GenMsgILSupport:Yes”
如果不用1的方式,也可以在CANIF模塊里手動(dòng)設(shè)置其上層模塊Upper Layer(PduUserTxConfirmationUL)為XCP模塊。其他屬性同“應(yīng)用報(bào)文:GenMsgILSupport:Yes”
診斷報(bào)文:
功能尋址Yes
物理尋址請(qǐng)求Yes
物理尋址響應(yīng)Yes(物理尋址和功能尋址的區(qū)別請(qǐng)自行擺渡)
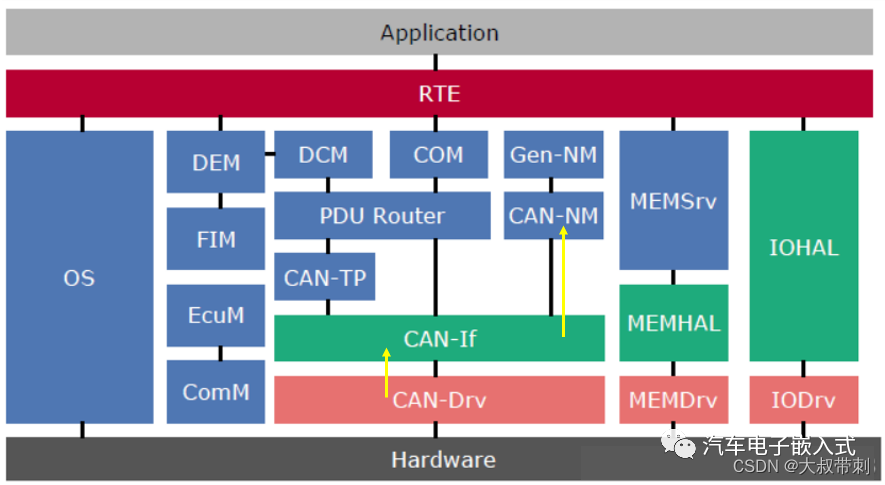
1.2 報(bào)文類型決定信號(hào)流路徑
以TX報(bào)文為例:
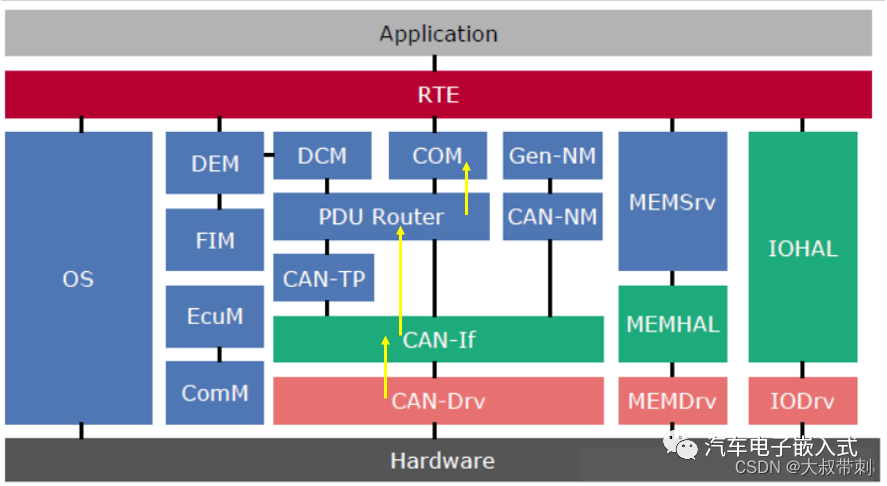
普通報(bào)文路徑:CAN->CANIF->PDUR->COM
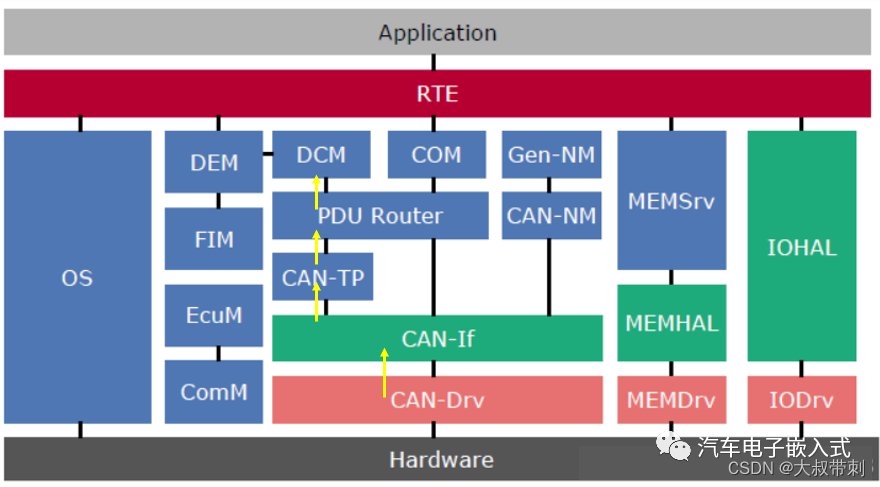
診斷報(bào)文路徑:CAN->CANIF->CANTP->PDUR->DCM
XCP報(bào)文路徑:CAN->CANIF->XCP
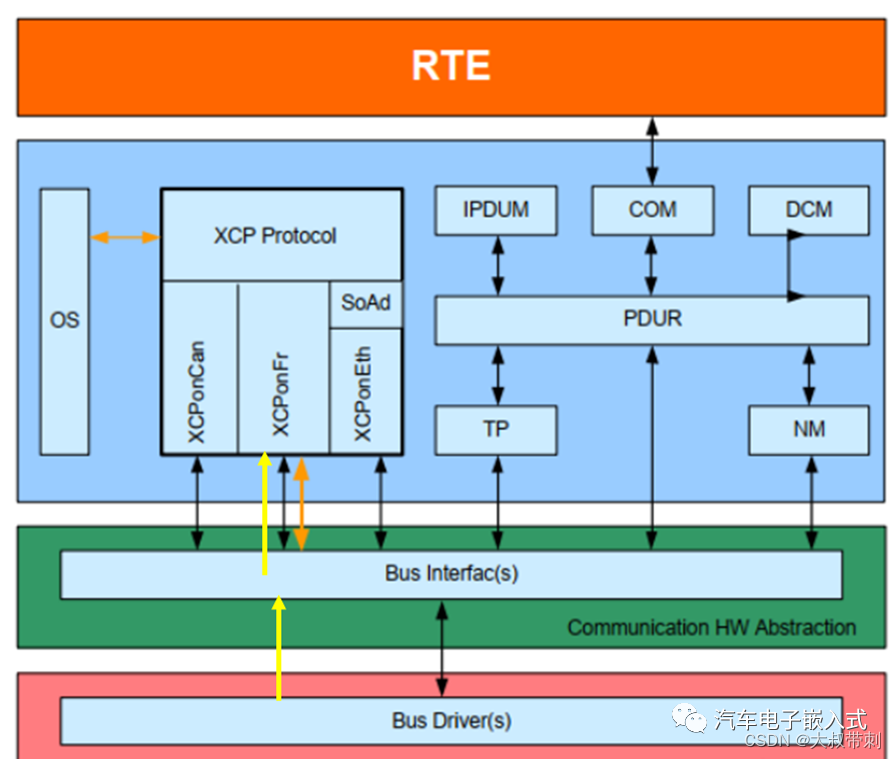
網(wǎng)絡(luò)管理報(bào)文路徑:CAN->CANIF->CANNM
之所以把PDUR標(biāo)紅,是因?yàn)樵谙旅娴呐渲弥蟹奖阄覀冏R(shí)別PDUR的相關(guān)模塊,這個(gè)要在PduRBswModules配置項(xiàng)中選擇的!從這里也可以直接確定,PDUR的PduRBswModules上下文最多只有CANIF,COM,CANTP,DCM。
2. 配置實(shí)踐
DBC如下:
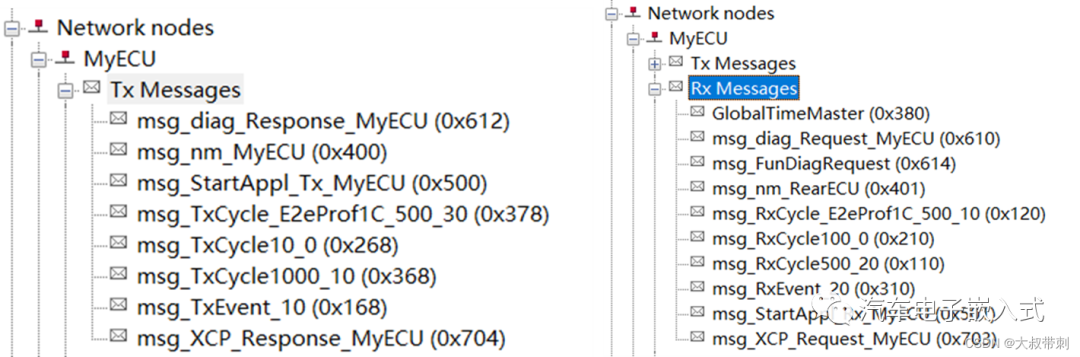
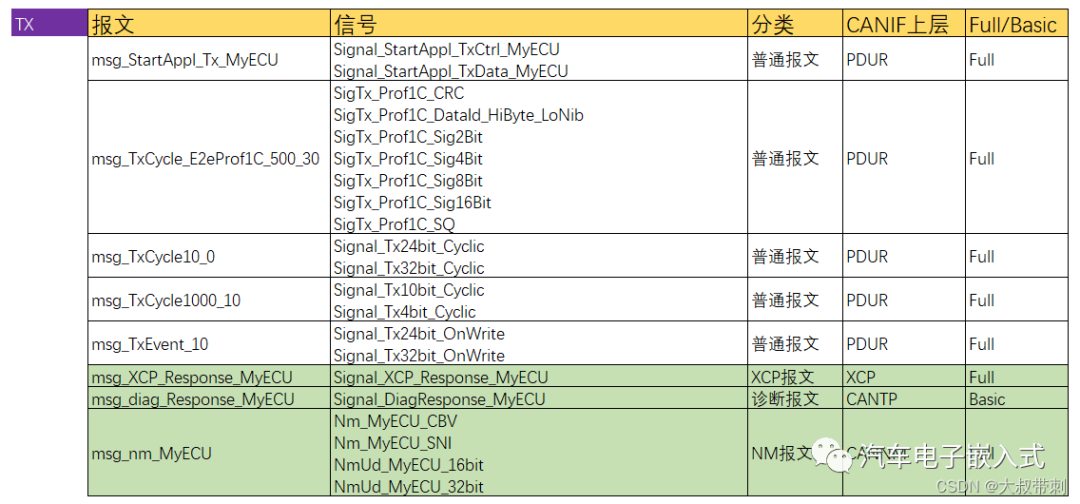
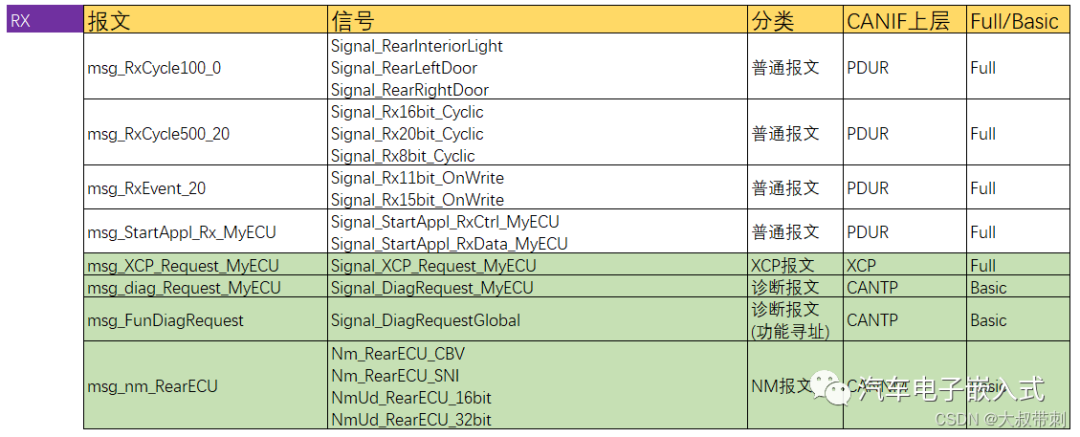
我習(xí)慣將DBC中所有報(bào)文簡(jiǎn)單羅列到一個(gè)表中,按報(bào)文功能進(jìn)行分類。這樣結(jié)合上面我們的總結(jié),就對(duì)于每個(gè)報(bào)文的路徑有一個(gè)全局的了解。如果項(xiàng)目比較大,報(bào)文較多的情況,建議將普通報(bào)文之外的報(bào)文(NM報(bào)文,XCP報(bào)文,診斷報(bào)文)列出來(lái),因?yàn)樗麄兲厥獍。?/p>
通過(guò)觀察DBC屬性,制作報(bào)文分類表格:
好,接下來(lái)進(jìn)入我們的實(shí)戰(zhàn)環(huán)節(jié)。
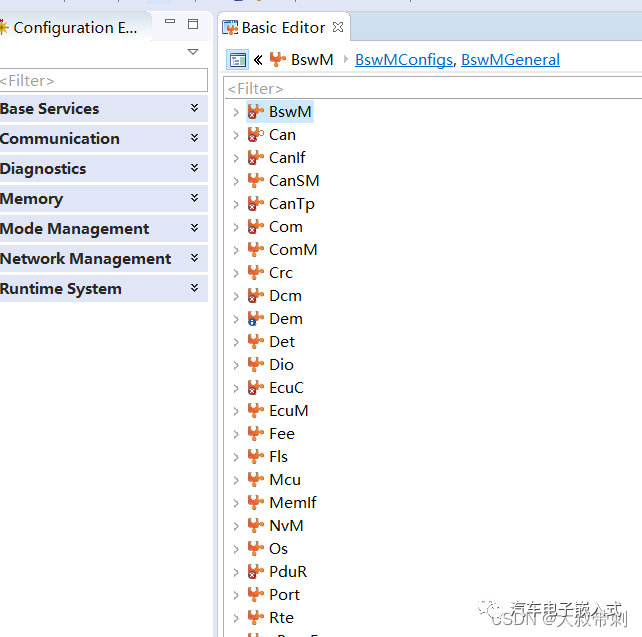
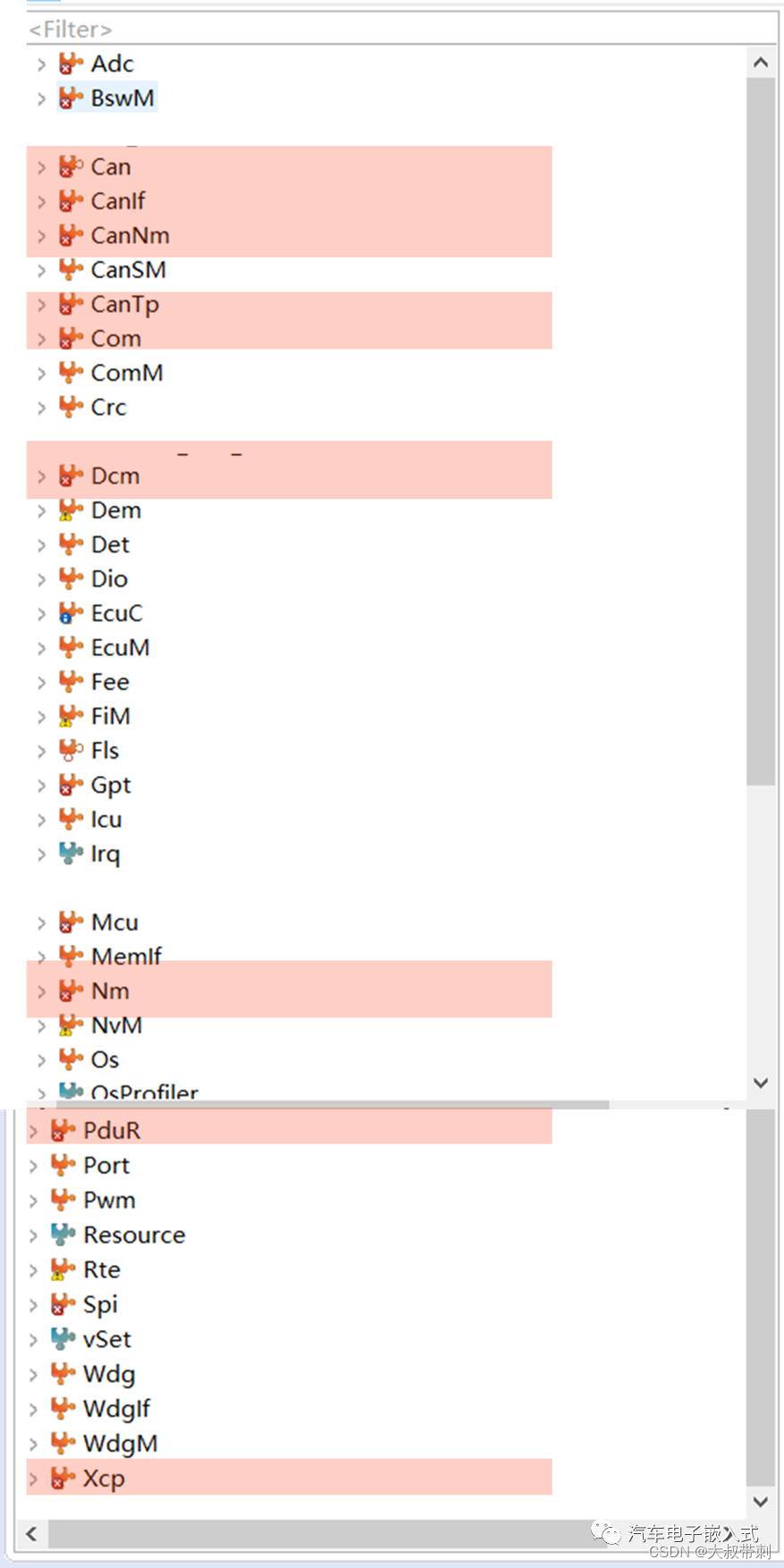
導(dǎo)入DBC,Update工程, 現(xiàn)在看工具自動(dòng)配置中遇到的錯(cuò)誤還是比較多的, 所以我們接下來(lái)的任務(wù)就是將這些模塊的錯(cuò)誤全部Fixed掉!
2.1 搞定信號(hào)路徑
2.1.1 ECUC模塊
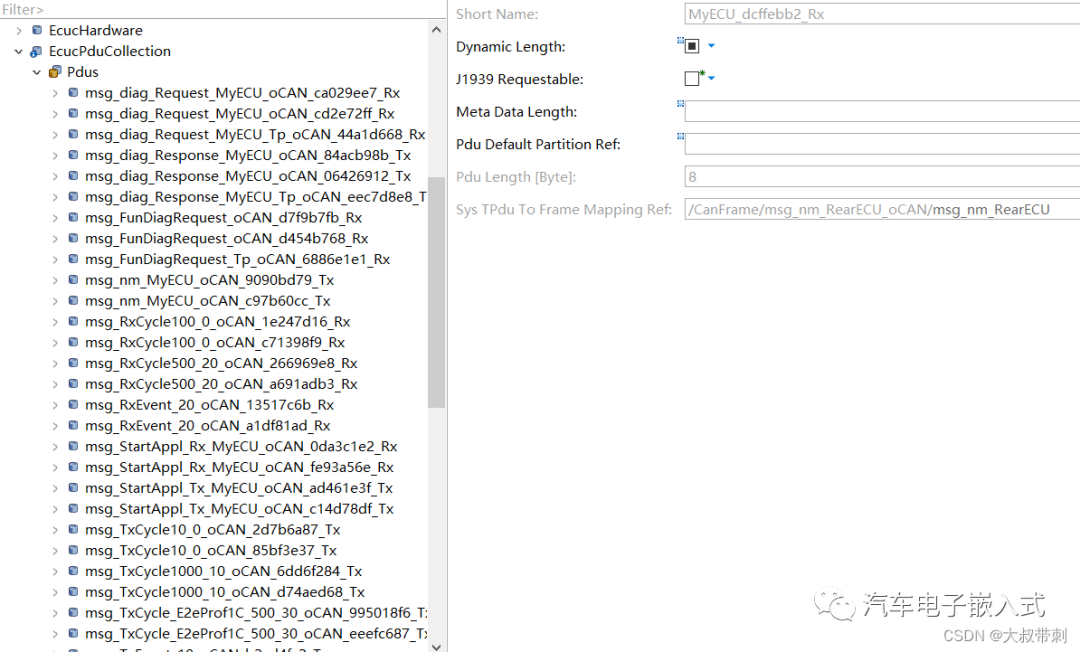
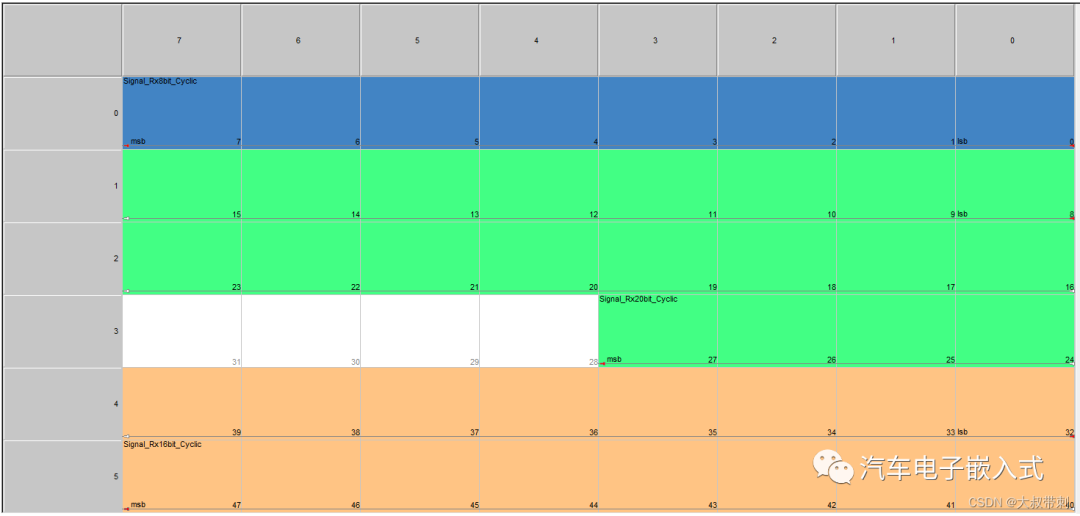
EcucPduCollection這個(gè)Container的作用.數(shù)據(jù)在CAN通信協(xié)議棧各層間都是以PDU形式傳輸?shù)模瑸榱藢⒏鲗覲DU關(guān)聯(lián)起來(lái),則需要定義全局 PDU(Global PDU)。由于全局PDU不屬于任何一個(gè)標(biāo)準(zhǔn)BSW模塊,所 以AUTOSAR提出了一個(gè)EcuC模塊來(lái)收集一些配置信息。在EcuC模塊中定義全局PDU時(shí)不需要關(guān)心其數(shù)據(jù)類型,只需要定義PDU長(zhǎng)度即可。
所以我們先對(duì)照DBC對(duì)照檢查以下,ECUC/EcucPduCollection對(duì)各個(gè)PDU(PDU是啥?你可以簡(jiǎn)單理解成一個(gè)PDU就對(duì)應(yīng)總線上的一個(gè)Message再附上一個(gè)地址信息的這么一個(gè)玩意--雖然這種說(shuō)法不準(zhǔn)確,但是它能有助于你去理解)的長(zhǎng)度定義是否正確,至于長(zhǎng)度之外的錯(cuò)誤,先忽略之,后面其他模塊配好之后,ECUC中相關(guān)錯(cuò)誤一般就自動(dòng)消失了.
2.1.2CAN模塊
CAN模塊是直接面向硬件的, 所以CAN模塊主要的配置分2部分:
對(duì)CAN控制器的配置,包括,參考時(shí)鐘, 波特率,采樣點(diǎn),幀類型,處理方式Polling/Interrupt;
和CANIF的聯(lián)系,即對(duì)Hoh和MailBox和Filter的配置)
CAN控制器的配置
本階段我們只關(guān)注CAN控制器的配置! (在后面的步驟中再重點(diǎn)配置Hoh和MailBox和Filte,所以本階段這三方面的錯(cuò)誤先忽略!)
CAN控制器的配置還是比較容易的,如果有什么錯(cuò)誤一般根據(jù)工具里面給出的提示即可輕易解決。這里科普2個(gè)基本知識(shí)點(diǎn), 也是CAN模塊一個(gè)稍微難懂的概念 - CAN的時(shí)鐘, CAN的重同步和采樣點(diǎn).
CAN時(shí)鐘

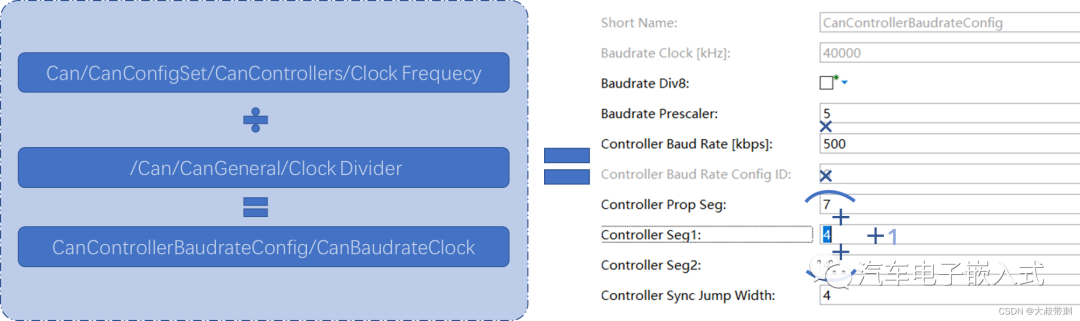
Can/CanConfigSet/CanControllers/Clock Frequecy這個(gè)值是從芯片的時(shí)鐘樹(shù)分頻而來(lái), 在MCAL的MCU模塊中指定.
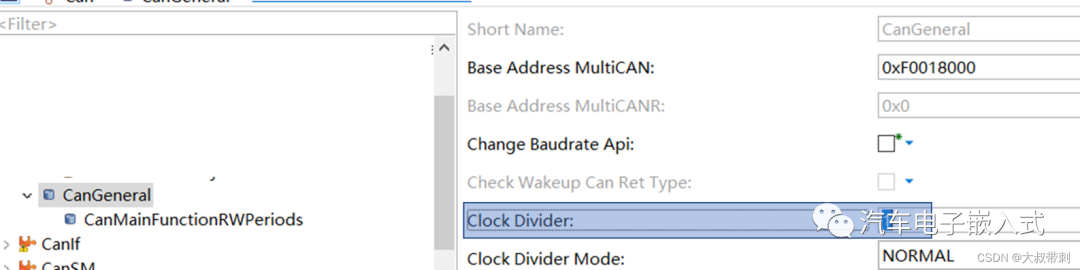
/Can/CanGeneral/Clock Divider是對(duì)上面Can/CanConfigSet/CanControllers/Clock Frequecy的分頻, 他們相除的結(jié)果在CanControllerBaudrateConfig/CanBaudrateClock中, 比如
Clock Frequecy = 40M, Clock Divider = 1, 則CanBaudrateClock= 40M = 40000KHz.

重同步和采樣點(diǎn)

參考文獻(xiàn)《CAN總線學(xué)習(xí)筆記(5)- CAN通信的位定時(shí)與同步》這篇博文有非常詳盡的介紹( 如果是Tir1,一般OEM會(huì)給出具體的采樣點(diǎn)參數(shù)值, Autosar工具也會(huì)給出參考值)我在這就蜻蜓點(diǎn)水說(shuō)以下計(jì)算原則。
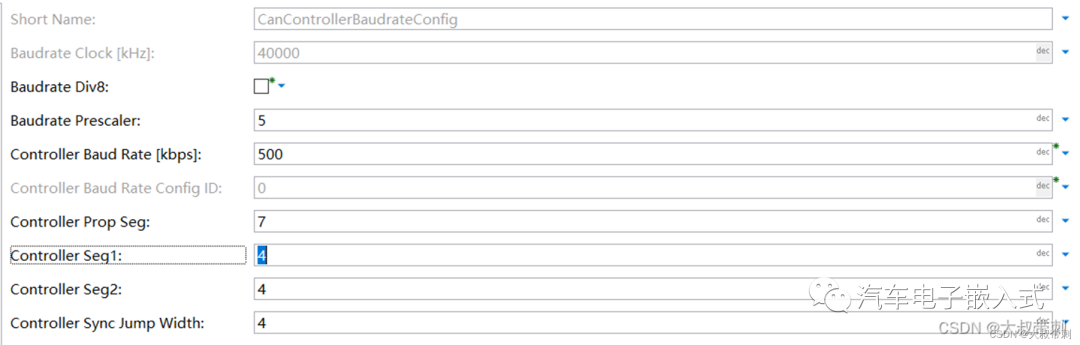
Sync Seg(同步段):長(zhǎng)度固定為1Tq, 所以配置工具中沒(méi)有它的配置.
在Vector的配置工具中, 定義Prop+Seg1 = TSeg1, Seg2 = TSeg2,一開(kāi)始感覺(jué)后別扭,后來(lái)發(fā)現(xiàn)這樣也好,計(jì)算采樣點(diǎn)位置更加方便了,比如采樣點(diǎn)為80%:
(同步段(1) + TSeg1)/(同步段+Tseg1+Tseg2) = 80%,
如果一個(gè)BitTime中Tq總和固定了,比如為16個(gè)Tq,
同步段(1) + TSeg1 + TSeg2 = 16
根據(jù)這個(gè)二元一次方程組則很容易算出各段的值.
Sync Seg固定為1, TSeg1 = 11, Seg2 = 4.
SyncJumpWidth:它的值是用于調(diào)整相位緩沖段1和相位緩沖段2的值, 用于CAN的同步,比如相位緩沖段1向前增長(zhǎng)了3個(gè),則相位緩沖段2向后減少3個(gè)Tq.---也就是一次同步中相位緩沖段改變的長(zhǎng)度.所以Sync Jump Width的設(shè)置有2個(gè)原則:
Sync Jump Width <= 3,
Sync Jump Width <= Min(Seg1, Seg2), 因?yàn)橐淮瓮秸{(diào)整的幅度不能超出相位緩沖段1和2中任意一個(gè)!
敲黑板了,下面畫重點(diǎn):
好了,截止目前,我們把CAN模塊的1/2錯(cuò)誤都消掉了, 剩下CanHardwareObjects這個(gè)容器里面的錯(cuò)誤,我們先放下。繼續(xù)下一步。
2.1.3CANIF模塊
CANIF的配置主要分2部分
向上:指定各個(gè)PDU的上層模塊
向下:對(duì)Hoh的配置(配置PDU的HOh,對(duì)應(yīng)MailBox和Bufffer,CAN幀的類型)
這一步我們只關(guān)注它"向上:指定各個(gè)PDU的上層模塊"的功能.
檢查各個(gè)PDU的上層模塊
主要配置/CanIf/CanIfInitCfg/CanIfRxPduCfgs和/CanIf/CanIfInitCfg/CanIfTxPduCfgs這兩個(gè)小container
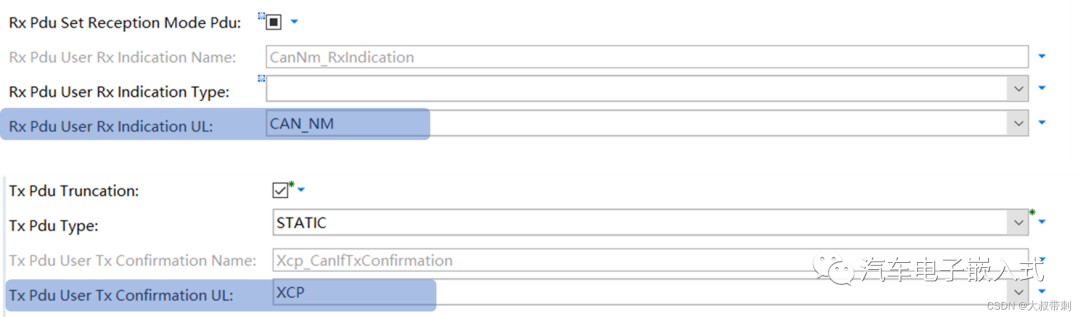
結(jié)合我們上面講的知識(shí), 檢查Davinci Cfg工具/CANIF/Pdu User Tx/Rx Confirmation UL這個(gè)配置項(xiàng)對(duì)PDU的上層配置是否正確, 即:
診斷報(bào)文: CANIF之上是CANTP,(CAN->CANIF->CANTP->PDUR->DCM)
NM報(bào)文:CANIF之上是CANNM,(CAN->CANIF->CANNM)
XCP報(bào)文:CANIF之上是XCP,(CAN->CANIF->XCP)
普通報(bào)文:CANIF之上是PDUR, (CAN->CANIF->PDUR->COM)
如果出現(xiàn)如下錯(cuò)誤:
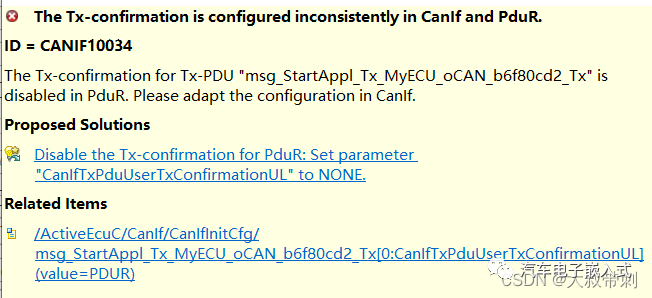
如果不需要Confirmation功能,則可以將Confirmation UL配置項(xiàng)中設(shè)為NONE -- 只要到對(duì)應(yīng)模塊中檢查該P(yáng)DU確實(shí)存在。比如:普通應(yīng)用報(bào)文PDUa,它的上層應(yīng)該是PDUR, 我們?nèi)DUR中檢查,如果它確實(shí)被映射到PDUR中了, 則可以在CANIF中將它的Confirmation UL設(shè)為NONE.
該容器(/CanIf/CanIfInitCfg/CanIfRxPduCfgs和/CanIf/CanIfInitCfg/CanIfTxPduCfgs)下其他的一些小錯(cuò)誤根據(jù)工具提示修改即可.

剩下的錯(cuò)誤在后面的操作中解決。
2.1.4XCP模塊
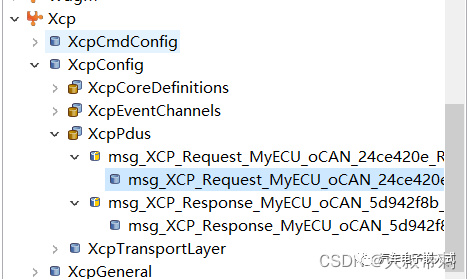
主要是配置XCP中用于接收和發(fā)送的PDU,如果XcpPdus這一塊有錯(cuò)誤,則檢查你在DBC中和CANIF中指定的XCP收發(fā)報(bào)文是否已經(jīng)在XCP中Mapping上了,其他小錯(cuò)誤根據(jù)提示修改即可。
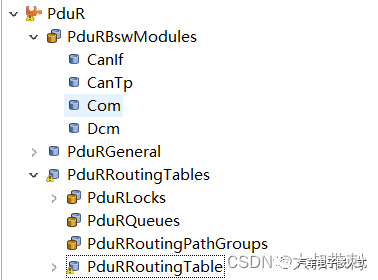
2.1.5PDUR模塊
PDUR主要有2個(gè)作用:對(duì)信號(hào)的路由,對(duì)不同總線信號(hào)的網(wǎng)關(guān)。
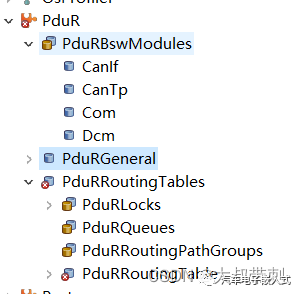
PduRBswModules指定PDUR的上下文模塊
根據(jù)我們上面的描述,PDUR向下向上的模塊分別是:
普通報(bào)文: CANIF->PUDR->COM
診斷報(bào)文:CANTP->PDUR>DCM
XCP報(bào)文和NM報(bào)文繞過(guò)PDUR。
所以如果你的網(wǎng)咯中沒(méi)有診斷報(bào)文,則PDURBswModules中,PDUR的上下層是CANIF和COM
如果有診斷報(bào)文,則PDURBswModules中,PDUR的上下層是CANIF,COM,DCM,CANTP.
PduRRoutingTables
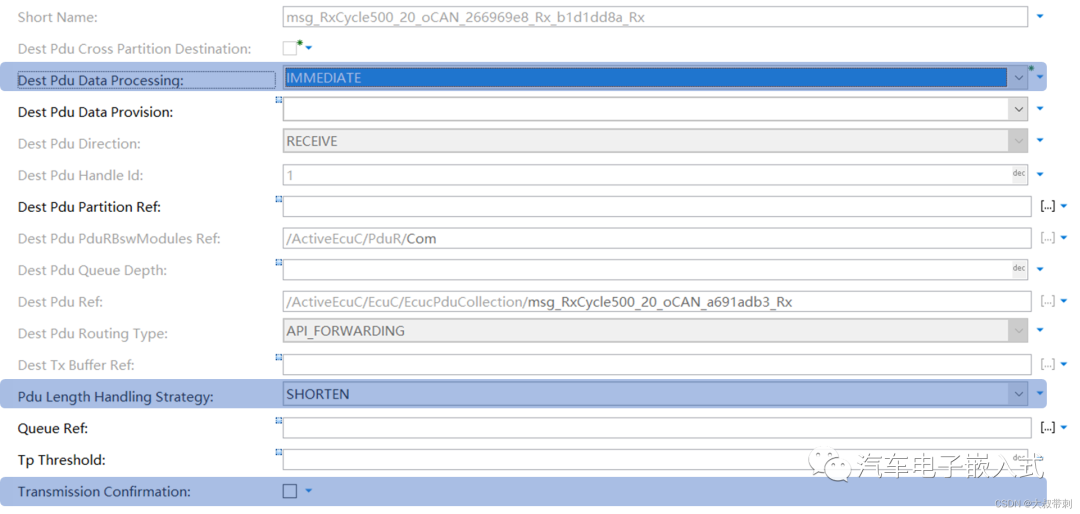
一般工具自動(dòng)生成的配置,出現(xiàn)錯(cuò)誤就在這三個(gè)地方。
PduR Transmission Confirmation這個(gè)錯(cuò)誤主要是由于PDUR的上下層Confirmation沒(méi)有一致,比如一個(gè)TX信號(hào),CANIF中將Confirmation UL指定為PDUR,而在PDUR中將Transmission Confirmation設(shè)為False,則自然會(huì)報(bào)錯(cuò);又或者在CANIF中將Confirmation UL設(shè)為NONE, 而在PDUR中將Transmission Confirmation設(shè)為True,則自然會(huì)報(bào)錯(cuò)。
其他小錯(cuò)誤根據(jù)提示修改即可。
2.1.6COM模塊
COM模塊非常簡(jiǎn)單,其作用就是將總線上的Msg進(jìn)行卸貨或者裝車,裝車:將信號(hào)組裝到Msg里面;卸貨:將Msg拆分成一個(gè)個(gè)的信號(hào),給應(yīng)用層或者CDD使用.
2.1.7CANTP模塊
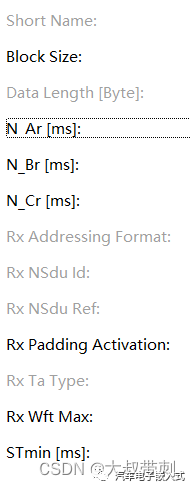
因?yàn)樵\斷協(xié)議中有多幀連續(xù)幀的概念,有些報(bào)文一幀是發(fā)不完的, 所以CANTp模塊的主要作用是對(duì)CAN I-PDU進(jìn)行分段和重新組裝,使得I-PDU的長(zhǎng)度不大于8個(gè)字節(jié),對(duì)CAN FD而言,CAN I-PDU不大于64個(gè)字節(jié)。
這里面的難點(diǎn)應(yīng)該就是一些時(shí)間參數(shù)的設(shè)定, 這個(gè)要結(jié)合UDS的14229/15765/11898和主機(jī)廠釋放的網(wǎng)絡(luò)規(guī)范進(jìn)行設(shè)定.
2.2 搞定Hoh和MailBox
(有朋友反應(yīng)這一塊有很多錯(cuò)誤,好吧,我們先講這一塊)
CAN模塊下面的CanHardwareObjects其實(shí)就是MailBox,是硬件上的存在。CANIF下面的Hoh包含Hrh(接收)和Hth(發(fā)送)是報(bào)文收發(fā)的句柄,是一個(gè)軟件概念。
結(jié)合我們上面的工作, 我接下來(lái)主要是對(duì)
CAN部分MailBox和Filter的配置
CANIF部分Hoh的配置
2.2.1 CAN模塊中MailBox配置
CanHardwareObjects
先檢查CanHardwareObjects這個(gè)容器下面, 檢查HardwareObject的數(shù)量.注意此時(shí)HardwareObject還沒(méi)有和CANIF中的PDU建立任何關(guān)系!--這模塊的HardwareObject我習(xí)慣叫它MailBox!
根據(jù)DBC中Message個(gè)數(shù), 設(shè)置CAN模塊下面每個(gè)CanHardwareObjects(就是MailBox)的CanHandleType,設(shè)為Full CAN還是Basic CAN.
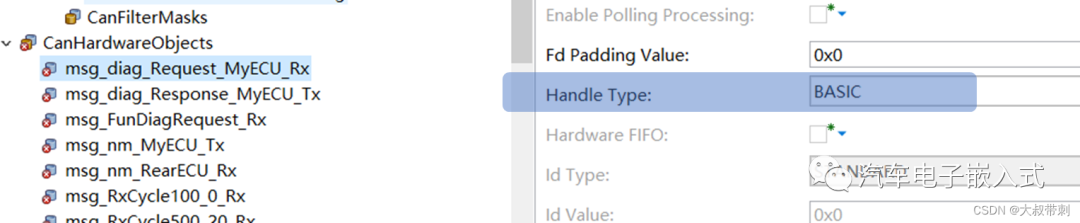
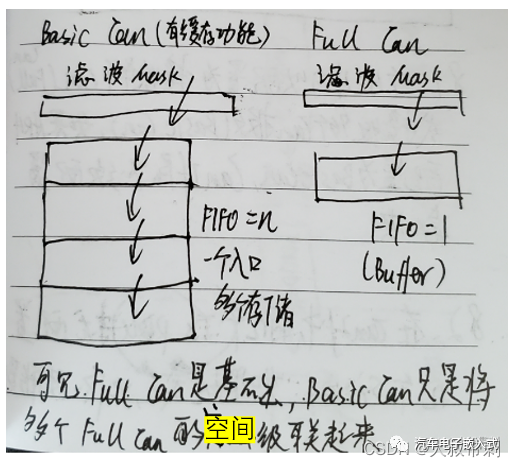
Full CAN和Basic CAN
先說(shuō)結(jié)論:
Full CAN一個(gè)Hoh對(duì)應(yīng)一個(gè)MailBox而B(niǎo)asic CAN一個(gè)MailBox可以處理多個(gè)PDU.
Full CAN是硬件濾波而B(niǎo)asic CAN軟件濾波,因此配成Basic的要設(shè)置濾波.
Full CAN一個(gè)Buffer對(duì)應(yīng)一個(gè)ID報(bào)文,無(wú)緩存功能而B(niǎo)asic CAN以FIFO的方式接受特定的多個(gè)報(bào)文,有緩存功能.
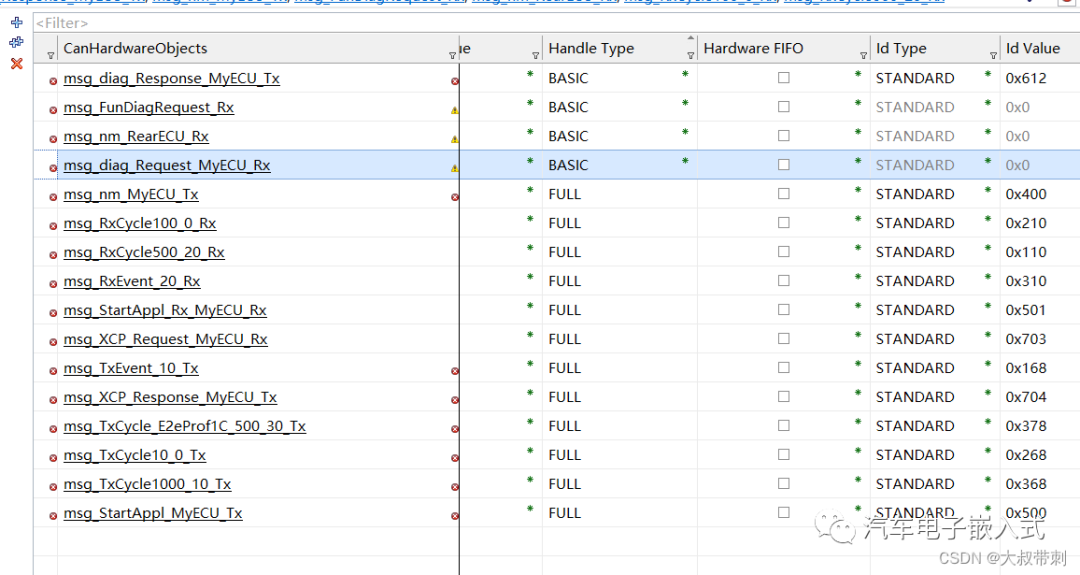
因此:
對(duì)于診斷報(bào)文和NM報(bào)文的接收?qǐng)?bào)文必須配置成Basic Can,
其他報(bào)文最好配成高效的Full CAN.
關(guān)于Full CAN和Basic CAN, 這篇文章講的很詳細(xì)《【AUTOSAR-CAN】CAN的 “BasicCAN架構(gòu)” 和 “FullCAN架構(gòu)”》, 這里我說(shuō)一下我的理解, 不一定很準(zhǔn)確,但有助于理解.
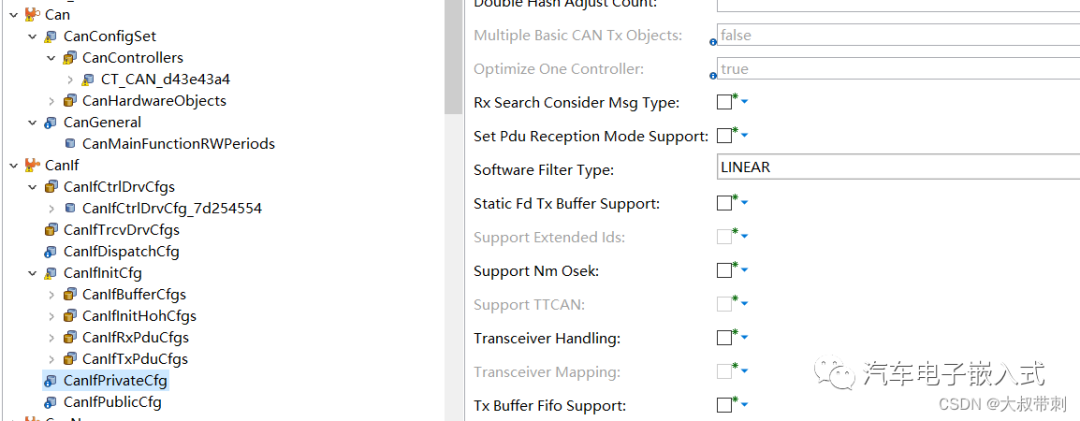
如果你在CanHardwareObjects這個(gè)容器下面配置的BasicCAN個(gè)數(shù)>1(Tx MailBox>1個(gè)或者Rx的MailBox>1個(gè))這個(gè)時(shí)候你應(yīng)該會(huì)遇到一個(gè)報(bào)錯(cuò):
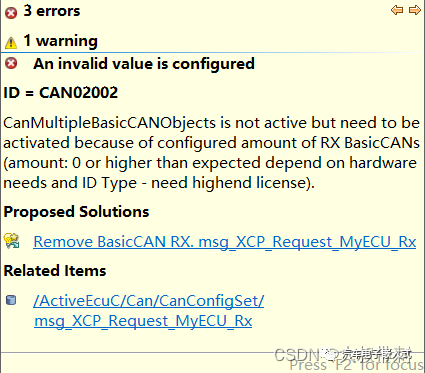
這是翻譯成人話就是你沒(méi)有使能Multi BasicCAN或者你么有更高級(jí)的授權(quán), 而這個(gè)時(shí)候你進(jìn)入CanGeneral這個(gè)容器下面卻發(fā)現(xiàn)不允許使能Multi BasicCAN!!
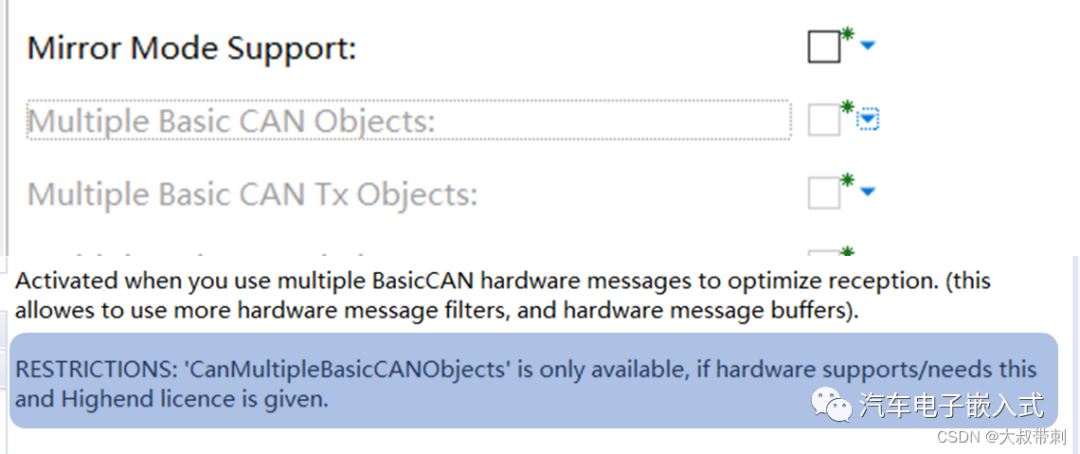
是不是很崩潰?---沒(méi)關(guān)系, 按下面這樣做:
將所有Tx的BasicCAN刪除到只剩一個(gè), Rx的BasicCAN刪除只剩一個(gè),然后命名(隨個(gè)人喜好)TxBasicCanMailBoxCommon和RxBasicCanMailBoxCommon.然后設(shè)置其Size大小為之前所有BasicCAN的MailBox總和!
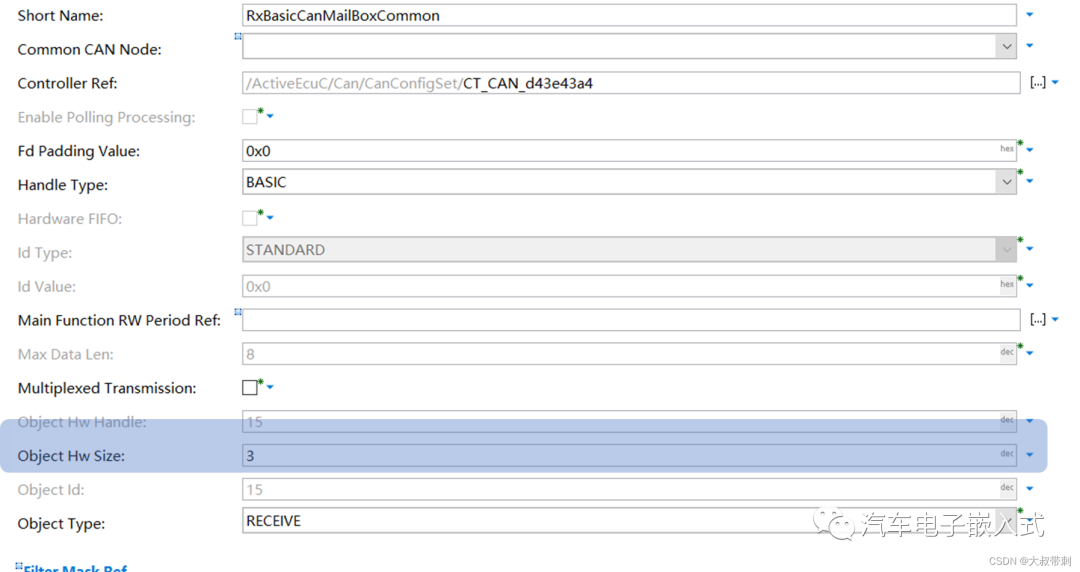
最后別忘了給接收的BasicCAN設(shè)置濾波,并綁定:
在CanFilterMasks下面設(shè)置濾波, 在BasicCAN的MailBox下面設(shè)置映射:
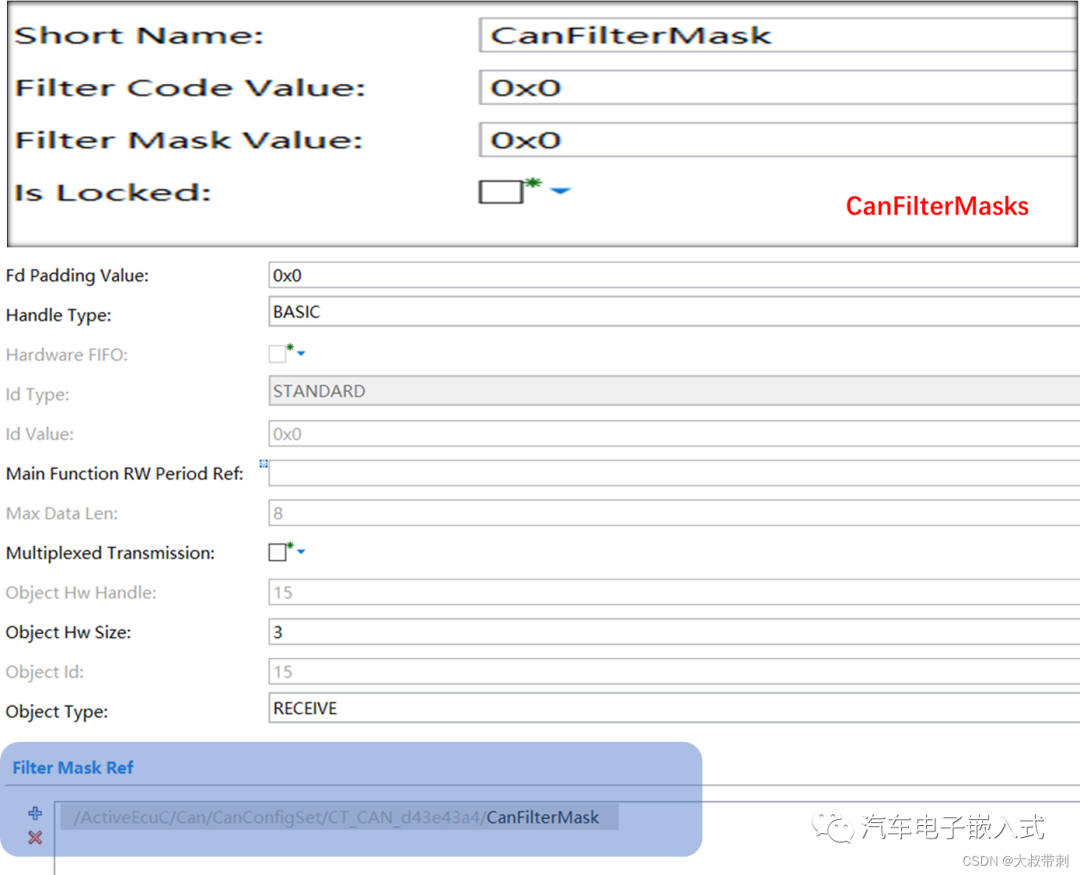
再科普以下濾波的設(shè)置:
濾波參數(shù)
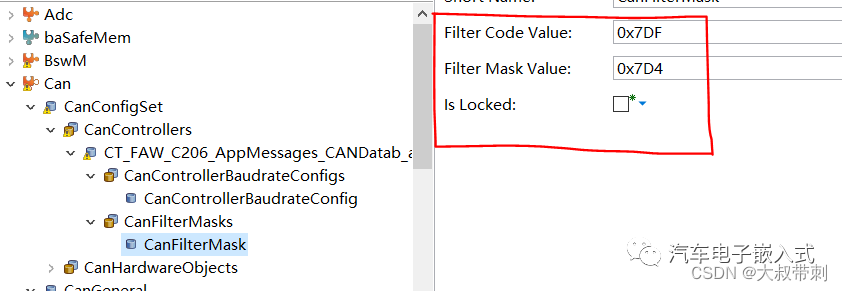
白名單模式計(jì)算原則是:received ID & Mask == Code & Mask.
有一個(gè)簡(jiǎn)便的方法就是,Code Value里面填寫ID大的那個(gè)ID值, Mask Value里面填寫ID小的那個(gè)ID值兩個(gè)數(shù)按位與后的值.
例如:我只想接受0x7DF和0x7D4這兩個(gè)報(bào)文,將其他報(bào)文過(guò)濾掉. 根據(jù)計(jì)算公式,對(duì)于0x7DF報(bào)文,
0x7DF & 0x7D4 == 0x7DF & 0x7D4
對(duì)于0x7D4報(bào)文, 0x7D4 & 0x7D4 == 0x7DF & 0x7D4
好了,縱然現(xiàn)在千般錯(cuò), 先放過(guò).去CANIF模塊!
2.2.2 CANIF模塊中的PDU(Rx和Tx PDU)
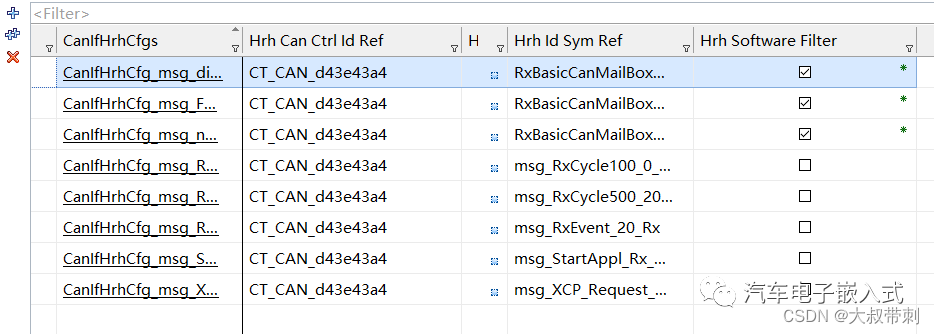
進(jìn)入/CanIf/CanIfInitCfg/CanIfInitHohCfgs/CanIfInitHohCfg/CanIfHrhCfgs這個(gè)下面,
將診斷Rx PDU和網(wǎng)絡(luò)管理的Rx PDU(他們是Basic Can)都映射到CAN模塊下面的RxBasicCanMailBoxCommon上!并勾選CanIfHrhSoftwareFilter.
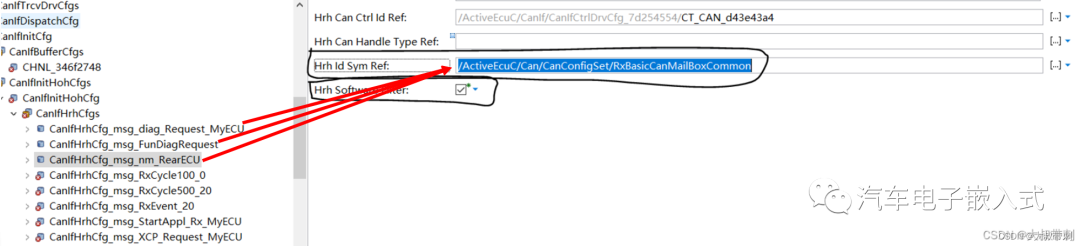
將XCP報(bào)文和普通應(yīng)用報(bào)文與CAN模塊下面的MailBox進(jìn)行一對(duì)一映射!--因?yàn)樗麄兪荈ULL CAN!
并取消CanIfHrhSoftwareFilter.
進(jìn)入/CanIf/CanIfInitCfg/CanIfInitHohCfgs/CanIfInitHohCfg/CanIfHthCfgs這個(gè)下面,安裝上面的步驟操作即可!
接下來(lái)為Tx的PDU配置Buffer即可!
其他一些錯(cuò)誤根據(jù)工具提示修復(fù)即可.這一塊相互綁定關(guān)系我做個(gè)圖譜:
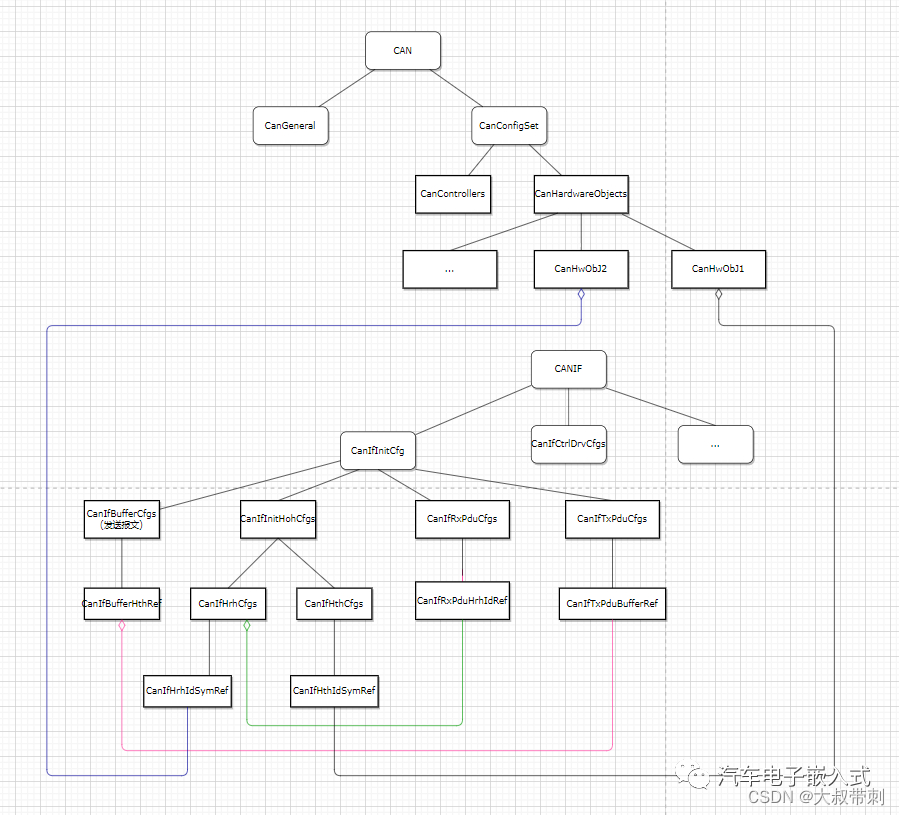
截止目前CAN和CANIF的錯(cuò)誤就全部消除了
審核編輯:湯梓紅
-
CAN
+關(guān)注
關(guān)注
59文章
3066瀏覽量
472734 -
信號(hào)
+關(guān)注
關(guān)注
12文章
2914瀏覽量
80122 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
398瀏覽量
23647 -
通訊協(xié)議
+關(guān)注
關(guān)注
10文章
298瀏覽量
21484
原文標(biāo)題:AUTOSAR實(shí)戰(zhàn)教程-通信協(xié)議棧CAN_CANIF_PDUR_CANTP_COM_XCP_ECUC配置一網(wǎng)打盡
文章出處:【微信號(hào):汽車電子嵌入式,微信公眾號(hào):汽車電子嵌入式】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
【LabVIEW串口通信】串行通信協(xié)議的可配置轉(zhuǎn)換問(wèn)題
如何配置局域網(wǎng)中的通信協(xié)議?
EPA通信協(xié)議棧設(shè)計(jì)中的關(guān)鍵技術(shù)研究

基于ARM的EPA通信協(xié)議棧優(yōu)化技術(shù)的研究與實(shí)現(xiàn)
基于嵌入式的實(shí)時(shí)通信協(xié)議棧研究與設(shè)計(jì)
局域網(wǎng)中通信協(xié)議的特點(diǎn)與配置分析
AUTOSAR通信協(xié)議棧的幾個(gè)問(wèn)題(一)
AUTOSAR實(shí)戰(zhàn)教程-通信協(xié)議棧介紹

AUTOSAR通信協(xié)議解析 如何實(shí)現(xiàn)AUTOSAR通信
AUTOSAR中通信堆棧的配置 AUTOSAR通信模塊測(cè)試方法
AUTOSAR通信實(shí)現(xiàn)中的常見(jiàn)問(wèn)題
AUTOSAR通信對(duì)自動(dòng)駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計(jì)
車載以太網(wǎng)通信協(xié)議棧如何測(cè)?UT和SP聯(lián)手!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論