") 如何用過(guò)熱時(shí)間常數(shù)實(shí)現(xiàn)伺服電機(jī)過(guò)載管理?
如何用過(guò)熱時(shí)間常數(shù)實(shí)現(xiàn)伺服電機(jī)過(guò)載管理?

當(dāng)需要較高的間歇功率密度值時(shí),工程師通常不希望使用傳統(tǒng)的均方根(RMS)計(jì)算,轉(zhuǎn)速-轉(zhuǎn)矩性能曲線就成為了挑選伺服電機(jī)和驅(qū)動(dòng)器的標(biāo)準(zhǔn)方法。但這樣做可能會(huì)導(dǎo)致電機(jī)或驅(qū)動(dòng)器容量不足。
對(duì)于大多數(shù)伺服應(yīng)用來(lái)說(shuō),使用經(jīng)典性能曲線與RMS計(jì)算是完全可以接受的。但如果應(yīng)用的間歇轉(zhuǎn)矩在一定時(shí)間段內(nèi)大于電機(jī)的持續(xù)轉(zhuǎn)矩,則不應(yīng)忽視所擬解決方案的熱時(shí)間常數(shù)。當(dāng)情況由于缺乏更多余量空間時(shí)而進(jìn)一步加劇時(shí),這些熱限值就會(huì)變成又一個(gè)隱患。
本文提出了一種在應(yīng)用中實(shí)際電流長(zhǎng)時(shí)間大于持續(xù)電流時(shí)加強(qiáng)伺服電機(jī)熱時(shí)間常數(shù)動(dòng)態(tài)影響嚴(yán)重程度風(fēng)險(xiǎn)管理和理解的可視化方法。
方法原理
伺服電機(jī)由于其內(nèi)部損耗而產(chǎn)生熱量,且每個(gè)電機(jī)的自身散熱能力決定了其額定連續(xù)容量。傳統(tǒng)的伺服電機(jī)應(yīng)用需要多種不同速率,同時(shí)要求轉(zhuǎn)矩在定義的運(yùn)動(dòng)曲線上小于或大于電機(jī)的額定間歇轉(zhuǎn)矩。傳統(tǒng)上,通過(guò)超過(guò)伺服電機(jī)連續(xù)能力的峰值電流來(lái)實(shí)現(xiàn)加減速要求。運(yùn)動(dòng)曲線大多情況下要求這些峰值電流的持續(xù)時(shí)間段最大不超過(guò)驅(qū)動(dòng)放大器一般允許的4-5
在這種常規(guī)間歇工作運(yùn)行情況下,通常不需要根據(jù)應(yīng)用的峰值轉(zhuǎn)矩要求,在電機(jī)的連續(xù)能力范圍內(nèi)選擇電機(jī)。我們只需利用均方根(RMS)方程來(lái)找到應(yīng)用的有效連續(xù)轉(zhuǎn)矩和速率要求,然后確保此等效操作要求落在所選電機(jī)的連續(xù)和熱能力范圍內(nèi);同時(shí)驗(yàn)證在所需的轉(zhuǎn)速下,所需的峰值轉(zhuǎn)矩小于所選電機(jī)和驅(qū)動(dòng)器提供的峰值轉(zhuǎn)矩。
應(yīng)用:特殊工況
將閉環(huán)運(yùn)動(dòng)控制技術(shù)擴(kuò)展到非傳統(tǒng)的應(yīng)用中,通常會(huì)導(dǎo)致超出常規(guī)間歇工作的特定要求和運(yùn)行工況。然而,即使在傳統(tǒng)應(yīng)用中,我們有時(shí)也會(huì)遇到必須滿足的特殊工況。
示例:
對(duì)于一旦發(fā)生急停必須在斷開(kāi)主電源之前在特定時(shí)間內(nèi)停止所有受控運(yùn)動(dòng)這一要求,對(duì)于大多數(shù)應(yīng)用來(lái)說(shuō),這通常不是問(wèn)題,但在具有巨大動(dòng)能的大型機(jī)器上,使軸運(yùn)動(dòng)停止所需的時(shí)間很容易超過(guò)電機(jī)驅(qū)動(dòng)組合典型的最長(zhǎng)4-5 秒的可用峰值電流時(shí)間。
這一要求雖然不需要更大的電機(jī),但通常需要更高的連續(xù)電流驅(qū)動(dòng),以確保提供急停減速期間所需的峰值電流。對(duì)于一些大型機(jī)器,急停時(shí)間要求在20到40秒范圍內(nèi)并不少見(jiàn)。
目前相當(dāng)多的伺服電機(jī)應(yīng)用具有特殊的運(yùn)行工況或面臨可能發(fā)生的特殊事件,在伺服電機(jī)定規(guī)和選型過(guò)程中需要考慮這些工況或事件。無(wú)論環(huán)境是否會(huì)影響電機(jī)的使用,均應(yīng)選擇合適的伺服電機(jī)和驅(qū)動(dòng)器組合以最大限度地降低由于特定事件或操作要求帶來(lái)的故障風(fēng)險(xiǎn),從而最大限度地提高可靠性和安全性。
過(guò)載:功率損耗的影響
根據(jù)應(yīng)用要求的復(fù)雜性,許多應(yīng)用都要求轉(zhuǎn)矩和電流高于電機(jī)的持續(xù)轉(zhuǎn)矩和電流(Ic 或 I_rated)作為所需RPM的因變量。因此,需要考慮電機(jī)功率損耗的潛在限制或控制,以便完成工作或特定事件,同時(shí)保護(hù)電機(jī)的絕緣系統(tǒng)免受熱過(guò)載的影響。對(duì)于評(píng)估中的這些特定情況或事件,盡管仍然需要確保整體產(chǎn)品選擇要求,過(guò)載情況可能因應(yīng)用不同而差異巨大。
對(duì)于這些具有某些潛在事件或其他情況的應(yīng)用,需要特定的峰值電流(I_actual)才能在合格的時(shí)間段內(nèi)產(chǎn)生特定的峰值轉(zhuǎn)矩(Tpk)。此時(shí),我們還需要了解并確定電機(jī)的繞組/線圈是否可以在不損壞電機(jī)絕緣的情況下維持所需的過(guò)載電流。
溫度每超過(guò)連續(xù)額定值10°C,電機(jī)絕緣的可用壽命(基于其連續(xù)額定值)就會(huì)大約減半。
我們可以使用以下公式估算電機(jī)線圈/繞組從冷啟動(dòng)(環(huán)境)到額定極限溫度(t_ ultimate)的時(shí)間:
t_ultimate = -TCT_coil(mounted) x ln[1-(W_loss(rated)/W_loss(actual))]
or
或
t_ult. = -TCT_winding x ln[1-(Ic2/I_actual2)]
其中W_loss(rated)替換為Ic2 或I_rated2,W_loss(actual)替換為I_actual 2
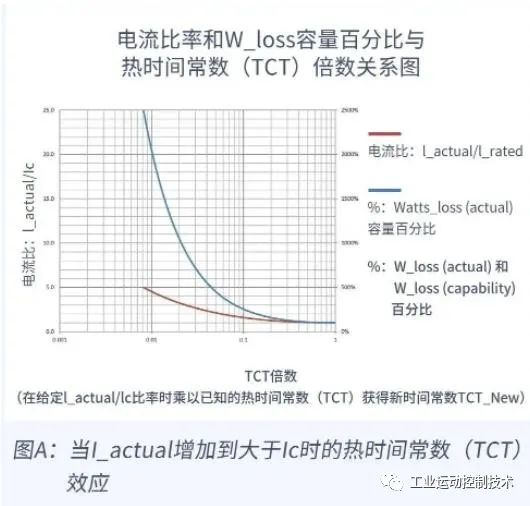
過(guò)載對(duì)熱時(shí)間常數(shù)(TCT)的影響
在下圖 A 中,特定條件下I_actual大于 Ic(motor)的I_顯著性可以通過(guò)W_loss(actual) / W_loss(rated)的百分比來(lái)表示,兩者都給出了相對(duì)于計(jì)算的熱時(shí)間常數(shù) (TCT)倍數(shù)的曲線圖。
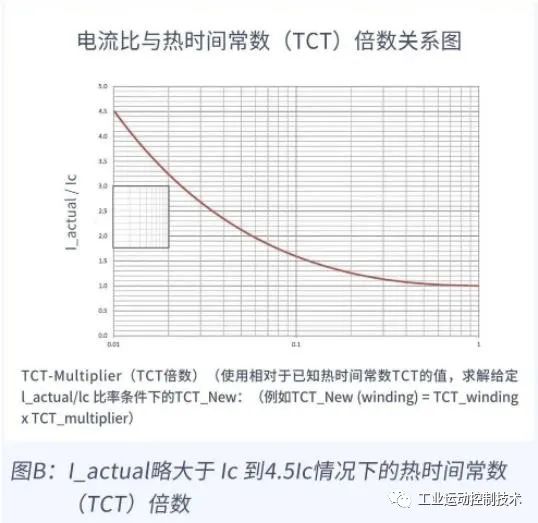
圖B允許我們以圖形方式確定特定的TCT,從而確定所評(píng)估的特定條件下達(dá)到極限溫度的時(shí)間,其方法是將圖形的X軸對(duì)應(yīng)(TCT)倍數(shù)作為所需I_actual相對(duì)于已知TCT的函數(shù),然后將該結(jié)果乘以 5,以確定達(dá)到極限溫度的時(shí)間。
示例:
問(wèn)題1:無(wú)論驅(qū)動(dòng)器的供電能力如何,假設(shè)我們從一開(kāi)始就處于25°C的環(huán)境溫度,電機(jī)能否在20秒時(shí)間內(nèi)承受3倍IC的峰值電流?假定最初提出的電機(jī)應(yīng)用在正常運(yùn)行時(shí)TCT_winding= TCT_coil(mounted)=60秒。
Q1 答:使用圖 B,我們只需轉(zhuǎn)到左側(cè)的垂直刻度 3 (3xIc) 并沿水平移動(dòng),直到與曲線相交,然后在半對(duì)數(shù)刻度上讀取相應(yīng)的 X 軸乘數(shù),將其和公布的TCT_winding相乘。
3Ic 時(shí) X對(duì)數(shù)軸的讀數(shù)約為0.023,因此,在3Ic時(shí),有效TCT_winding(3Ic) = 0.023 x 60 = ~1.38_sec。
因此,對(duì)于此應(yīng)用,我們將需要選擇更大的電機(jī)或具有更長(zhǎng)TCT_winding的電機(jī),或更改條件。
問(wèn)題2:由于問(wèn)題1中的電機(jī)無(wú)法在3Ic情況下實(shí)現(xiàn)耐受30秒,我們可以實(shí)現(xiàn)在Ipk為2Ic的情況下耐受20秒嗎?
Q2 答:同樣地,使用圖 B,我們可以獲取2Ic時(shí)X對(duì)數(shù)軸的讀數(shù)大約為0.057。因此,在 2Ic 時(shí),您的有效TCT_winding(2Ic) = 0.057 x 60 = ~3.42秒,從而可以知道5xTCT = 99.3%的溫升時(shí)間約為17.1秒,它仍然小于建議的20秒規(guī)格。
因此,即使將規(guī)格更改為2Ic時(shí)耐受20秒,我們也需要選擇更大的電機(jī)或具有更長(zhǎng)TCT_winding的電機(jī),或者再次更改條件規(guī)格。
結(jié)論
顯然,在機(jī)器設(shè)計(jì)規(guī)劃階段有許多因素需要考慮。針對(duì)給定應(yīng)用的伺服電機(jī)和驅(qū)動(dòng)器選擇,會(huì)影響機(jī)構(gòu)在所有條件下成功實(shí)現(xiàn)所需性能的機(jī)會(huì):正常運(yùn)行、急停和可預(yù)見(jiàn)的潛在事件。如果要求電機(jī)的轉(zhuǎn)矩和電流需要有上其中一類的要求,在較長(zhǎng)時(shí)間內(nèi)超過(guò)額定連續(xù)能力,利用簡(jiǎn)化的圖形方法(圖B)可以幫助廣泛的風(fēng)險(xiǎn)管理決策克服初始設(shè)計(jì)的挑戰(zhàn)。
-
控制
+關(guān)注
關(guān)注
5文章
1035瀏覽量
125300 -
管理
+關(guān)注
關(guān)注
2文章
389瀏覽量
27076 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2185瀏覽量
61284
發(fā)布評(píng)論請(qǐng)先 登錄
PLC怎么控制多臺(tái)交流伺服電機(jī)達(dá)到同步工作

伺服電機(jī)的控制方式簡(jiǎn)述

派克Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

三菱伺服電機(jī)抖動(dòng)聲響的調(diào)整
舵機(jī)與伺服電機(jī)的區(qū)別是什么?
可編程電源長(zhǎng)期過(guò)載會(huì)有什么影響?
網(wǎng)絡(luò)化多電機(jī)伺服系統(tǒng)監(jiān)控終端設(shè)計(jì)
步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別是什么?
什么是伺服電機(jī)編碼器?作用/關(guān)鍵技術(shù)/選型等一起看看吧!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論