 高精地圖到底需要采集哪些要素?
高精地圖到底需要采集哪些要素?

高精地圖是L3級以上自動駕駛的必備組件,對于自動駕駛汽車而言,高精度地圖具備以下三大功能:路徑規劃、地圖匹配、輔助環境感知。它可以將車輛位置精準地定位于車道之上、幫助車輛獲取準確有效的當前位置及環境信息,并為車輛規劃制定最優路線。
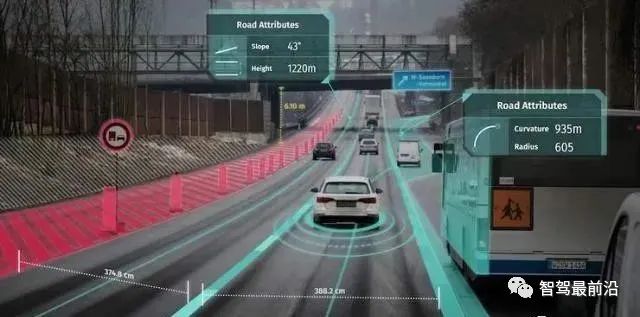
不同于傳統導航地圖,高精度地圖的適用對象是汽車,為了保證自動駕駛汽車的安全性,地圖數據需要保持“高精度、 高動態、多維度”等特點。
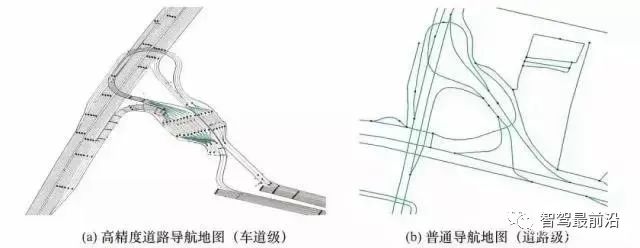
高精度地圖與普通導航地圖的對比
那么一張高精度地圖到底是由哪些元素構成的呢?
一般而言,電子地圖是通過不同的圖層去描述,然后將圖層疊加來進行表達。在一張電子地圖里,水系、鐵路、街區、建筑物可能會分別位于不同圖層,每一個圖層可以理解為一張透明薄膜 ,多圖層被繪制疊加后才能真正為我們所用。
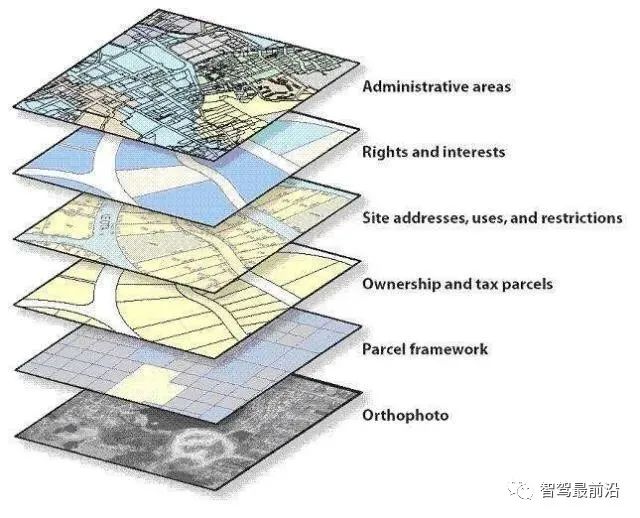
高精度地圖也一樣,同樣是分層繪制而成。它能更加真實地反映道路實際樣式,因此包含更多的圖層數量和道路數據細節。
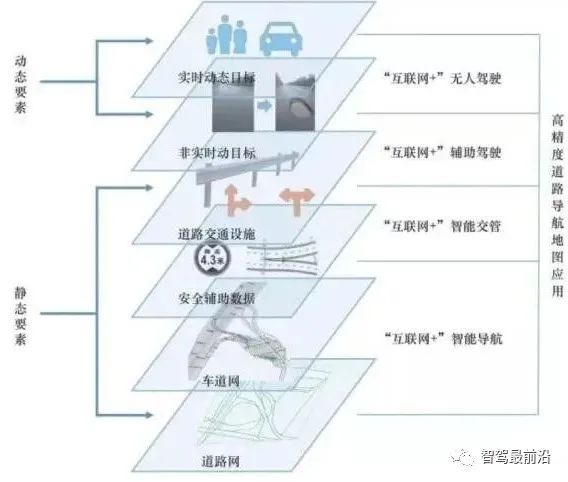
高精度地圖應用分析
易圖通副總裁羊鋮在接受采訪時曾表示:高精度地圖可分為車道級路網、定位、動態地圖三個圖層。車道級路網以及所包含的元素列表大家做得都比較類似。而目前業界分歧最大其實是定位層以及動態地圖層。
事實上,國外部分主流圖商也會將高精地圖分為:Road Model, Localization Model 和 Lane Model 這三層。雖然叫法不一,但大體上都是認為:Road Model用于導航規劃;Localization Model用于在地圖中定位車輛;Lane Model用于感知和考慮當前道路和交通狀況的路線規劃。

車道級路網圖層
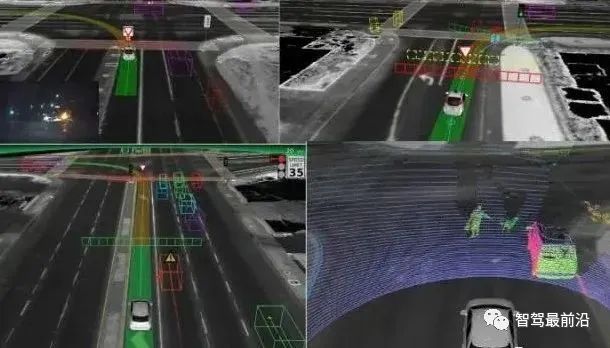
車道級路網圖層(Road Model), 需要為自動駕駛汽車提供準確的道路信息,因此要對路網精確的三維表征(厘米級精度)進行描述,比如路面的幾何結構、道路標示線的顏色與形狀、每個車道的(坡度、曲率、航向、高程等)數據屬性,甚至還要將道路隔離帶(及材質)等信息及其所在位置進行詳盡描述。
此外,在采集道路周邊環境時,所生成的點云數據中包含了極為豐富的地理空間信息,如道路標識牌、路燈、安全島、綠化帶、里程樁、桿狀物路燈、攝像頭、交通護欄等特征點線,以及相關屬性信息(等級、材質、類型、寬度等)。在制作高精度地圖時,這些要素信息通過點云的提取,既方便又能達到較高的空間幾何精度。
車道級路網數據,根據采集的特征點線,以及相應的屬性信息,在 ArcGIS 軟件中,經過符號化處理、圖面整飾、暈渲后即可形成色彩協調、圖面美觀的顯示地圖。
定位層
定位層(Localisation Model)主要用于輔助自動駕駛車輛定位。
關于定位層,高精地圖包含的元素取決于無人駕駛車輛本身采用了什么樣的傳感器。其次,定位層還與應用場景緊密相關,比如在無人礦區或地下停車場所自動駕駛時所需要的高精地圖信息要素也不一樣。
目前自動駕駛汽車在“定位”方面的解決方案差異性較大,有太多不同的傳感器包括攝像頭、激光雷達組合方案,目前定位技術主要集中在Feature Based和Dense Information Based這兩種方法上,高精度地圖制圖也主要圍繞這兩種方式。
因此在未來,圖商有可能會根據不同的場景、不同的傳感器生成不同的高精地圖。
動態層
動態層(Lane Model),主要用于自動駕駛汽車感知和考慮當前道路和交通狀況的路線規劃,但只有當車輛在地圖中準確定位時,動態地圖層(Lane Model)才能輔助車輛進行環境感知。
目前也有些圖商基于項目的研發,主張動態層信息要素需要具備如下要求:
Highly accurate geometry model;
Lane attributes ;
Traffic Regulations,Road Furniture And Parking;
Lane connectivity;
動態交通信息示例圖
實際上,現階段大家對于高精度地圖動態層需要哪些信息要素也還沒有定論,仍處于探討研究的階段。
因此對于“高精度地圖到底需要采集哪些要素”這個問題的答案其實是開放性的。
-
導航
+關注
關注
7文章
577瀏覽量
43928 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179866 -
高精地圖
+關注
關注
0文章
28瀏覽量
2965
原文標題:高精地圖到底需要采集哪些要素?
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛中的“無圖”真的不需要地圖嗎?

自動駕駛高精地圖定位模塊車規電容:低 ESR + 抗振動 10G 等級設計
隱式地圖:自動駕駛的“數字直覺“

得一微YEESTOR eMMC實現高精地圖高效存儲
從高精地圖到輕地圖,再到“無圖”,誰才是真需求?

四維圖新攜手北京車網推出時空要素數據集
什么樣的地圖在自動駕駛中才能稱為“輕圖”?

高德地圖與通義實驗室達成深度合作
實時生成式地圖對于自動駕駛來說有什么作用?

如何制作一張自動駕駛高精度地圖?

鴻蒙地圖功能開發【3. 代碼開發】##地圖開發##
鴻蒙地圖功能開發【1. 開發準備】##地圖開發##
康謀方案 | 高精LiDAR+神經渲染3DGS的完美融合實踐




 工商網監
工商網監
評論