") 伺服電機(jī)是如何構(gòu)造的?及伺服電機(jī)的工作原理
伺服電機(jī)是如何構(gòu)造的?及伺服電機(jī)的工作原理

伺服電機(jī)的構(gòu)造
伺服電機(jī)是直流電機(jī),具有以下5個部分:
1.定子繞組:這種類型的繞組繞在電機(jī)的固定部分。它也被稱為電機(jī)的勵磁繞組。
2.轉(zhuǎn)子繞組:這種類型的繞組繞在電機(jī)的旋轉(zhuǎn)部分。它也被稱為電機(jī)的電樞繞組。
3.軸承:有兩種類型,即字體軸承和背面軸承,用于軸的運(yùn)動。
4.軸:電樞繞組耦合在鐵桿上稱為電機(jī)的軸。
5.編碼器:它具有近似傳感器,可確定電機(jī)的轉(zhuǎn)速和電機(jī)的每分鐘轉(zhuǎn)數(shù)。
伺服電機(jī)機(jī)構(gòu)
它由三種基本類型組成:
1.控制裝置
2.輸出傳感器
3.反饋系統(tǒng)
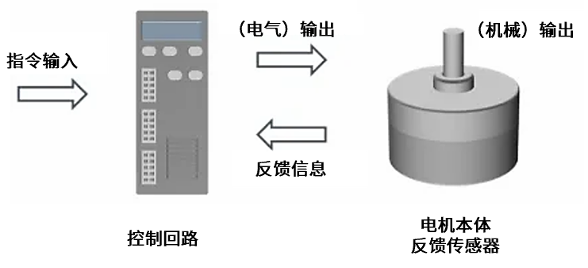
伺服電機(jī)工作在自動閉環(huán)系統(tǒng)的現(xiàn)象上。該閉環(huán)系統(tǒng)需要控制器。該控制器由比較器和反饋路徑組成。它有一個輸出和兩個輸入。在這種情況下,為了產(chǎn)生輸出信號,比較器用于比較所需的參考信號,并且該輸出信號由傳感器感測。電機(jī)的輸入信號稱為反饋信號。根據(jù)反饋信號,電機(jī)開始工作。比較器信號稱為電機(jī)的邏輯信號。當(dāng)邏輯差值較高時,電機(jī)將在所需時間內(nèi)打開,當(dāng)邏輯差值較低時,電機(jī)將在所需時間內(nèi)關(guān)閉。基本上,比較器用于確定電機(jī)是ON還是OFF。電機(jī)的正常運(yùn)行可以在良好的控制器的幫助下完成。
伺服電機(jī)控制:
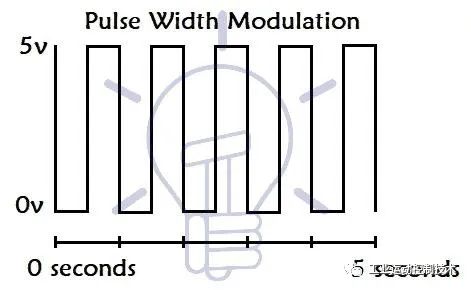
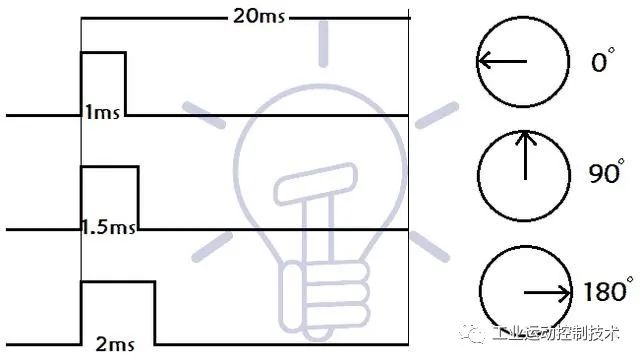
伺服電機(jī)可以通過PWM方法控制,即脈寬調(diào)制。它們向電機(jī)發(fā)送寬度不一致的電信號。寬度脈沖在1毫秒至2毫秒的范圍內(nèi)變化,并在一秒鐘內(nèi)重復(fù)50次將其傳輸?shù)剿欧姍C(jī)。脈沖的寬度控制旋轉(zhuǎn)軸的角位置。其中,使用了三個術(shù)語來表示伺服電機(jī)的控制,即最大脈沖,最小脈沖和重復(fù)率。
例如,舵機(jī)以1毫秒的脈沖移動,使電機(jī)向0°轉(zhuǎn)動,而以2毫秒的脈沖將電機(jī)向180°轉(zhuǎn)動,在角位置之間,脈沖寬度自行互換。因此,伺服以寬度為90.1毫秒的脈沖轉(zhuǎn)向5°。
每個伺服電機(jī)中都有三根電線或引線。兩根線使用正電源和接地電源,而第三根線用于控制信號。
伺服電機(jī)的工作原理
伺服具有位置傳感器,直流電動機(jī),齒輪系統(tǒng),控制電路。從電池獲取電力時,直流電機(jī)以高速和低扭矩運(yùn)行。該速度較低,扭矩將高于連接到直流電機(jī)的齒輪和軸組件。軸的位置由位置傳感器從其確定位置進(jìn)行感應(yīng),并向控制電路提供信息。信號由位置傳感器的控制電路解碼,并處理旋轉(zhuǎn)方向以獲得正確的位置。它需要4.8 V至6 V的直流電源。
減速齒輪箱連接到一個軸上,該軸會降低電機(jī)的轉(zhuǎn)速。減速齒輪箱的輸出軸與與編碼器或電位器連接的電機(jī)相同。然后將編碼器的輸出連接到控制電路。伺服電機(jī)的電線也連接到控制電路。電機(jī)通過微控制器通過PWM的形式發(fā)送信號進(jìn)行控制,PWM解碼控制電路以所需角度旋轉(zhuǎn)電機(jī),控制電路沿順時針或逆時針方向移動電機(jī),這樣軸也沿所需方向旋轉(zhuǎn)。編碼器將反饋信號發(fā)送到控制電路。當(dāng)電機(jī)達(dá)到所需角度時,控制電路會根據(jù)從編碼器接收的信號相應(yīng)地停止電機(jī)。
例如,如果電機(jī)處于30°,并且微控制器為電機(jī)提供60°的角度,則控制電路沿順時針方向旋轉(zhuǎn)電機(jī)。當(dāng)電機(jī)達(dá)到60°時,編碼器向控制電路發(fā)送信號以停止電機(jī)。
-
電機(jī)
+關(guān)注
關(guān)注
143文章
9592瀏覽量
154127 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2185瀏覽量
61290 -
電樞
+關(guān)注
關(guān)注
0文章
26瀏覽量
8040
發(fā)布評論請先 登錄
伺服電機(jī)和伺服減速機(jī)如何配選的
PLC怎么控制多臺交流伺服電機(jī)達(dá)到同步工作

交流伺服電機(jī)及其調(diào)速分類和特點(diǎn)

伺服電機(jī)的控制方式簡述

派克Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

三菱伺服電機(jī)抖動聲響的調(diào)整
舵機(jī)與伺服電機(jī)的區(qū)別是什么?
伺服電機(jī)中的回原點(diǎn)方式

伺服電機(jī)的工作原理、構(gòu)成以及應(yīng)用
什么是伺服電機(jī)編碼器?作用/關(guān)鍵技術(shù)/選型等一起看看吧!

伺服電機(jī)測試流程分析
如何應(yīng)對伺服電機(jī)過熱故障?
伺服電機(jī)編碼器怎么選型




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論