 梁山派開發板-21年電賽F題-送藥小車-賽題分析
梁山派開發板-21年電賽F題-送藥小車-賽題分析

送藥小車代碼倉庫:https://gitee.com/lcsc/medical_car
更好的觀看體驗請去:https://dri8c0qdfb.feishu.cn/wiki/UjwwwO0KZii5bykPcE4cJZafnAg
送藥小車立創開源平臺資料:https://oshwhub.com/li-chuang-kai-fa-ban/21-dian-sai-f-ti-zhi-neng-song-yao-xiao-che
1.賽題分析
原始題目
題目分析
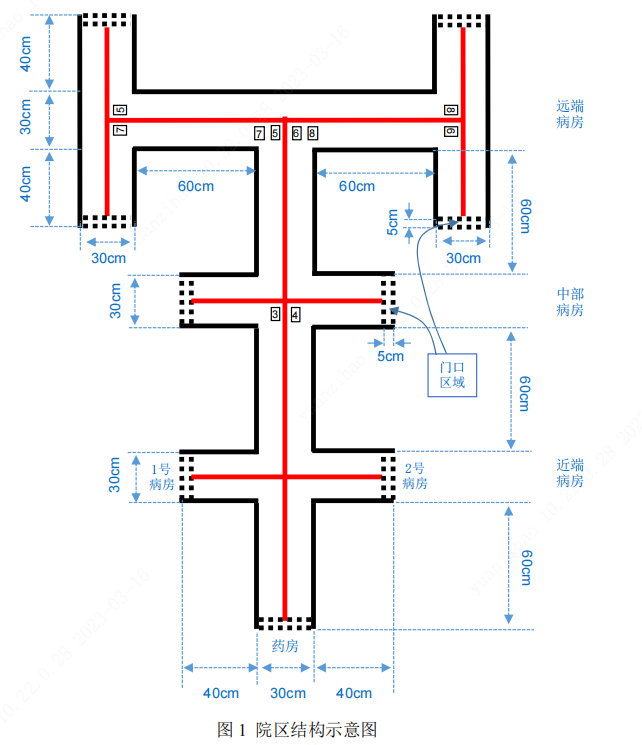
結構相關
小車長×寬×高不大于 25cm×20cm×25cm,只能使用普通車輪。在轉彎時不能碰到走廊邊緣,所以小車要盡可能小,越小越不容易碰到走廊邊緣。
藥品重約 200g。
硬件相關
兩個小車均由電池供電。
兩車之間要能無線通訊。
外界不能有任何附加電路與控制裝置。
要有一個 RGB 燈(通過不同的 PWM 值控制來切換顏色)或者直接三個紅,黃,綠燈。
作品應能適應無陽光直射的自然光照明及頂置多燈照明環境,測試時不得有特殊照明條件要求。
軟件相關
每次測試開始時,只允許按一次復位鍵,裝載藥品后即刻啟動運送時間記時,卸載藥品后即刻啟動返回時間記時。不能人工干預,測試項目只能測試一次。
在藥房處識別病房號的時間不超過 20s,發揮部分 1 中自選暫停點處的小車 2 與小車 1 的車頭投影外沿中心點的紅實線距離不小于 70cm。
有任何一個指示燈處于點亮狀態的小車必須處于停止狀態,運送過程中不允許在同一走廊上錯車或超車。
功能(得分)相關
近端病房號位置固定不變,中部病房和遠端病房號(3-8 號)在測試時隨機設定。
檢測到藥品裝載完成后就開始自動運送。
單個小車運送藥品到指定的近端病房并返回到藥房,運送時間和返回時間均小于 20s,超時扣分。
基本要求
根據走廊上的標識信息自動識別,尋徑將藥品送到指定病房,投影要在門口區域內,
到了指定病房后,點亮紅色指示燈,等待卸載藥品。
人工卸掉藥品后,小車自動熄滅紅色指示燈,開始返回。
自動返回藥房,點亮綠色指示燈。
發揮部分
兩個小車協同運送到同一指定的中部病房,小車 1 到達病房后等待卸載藥品,小車 2 識別病房房號裝載藥品后啟動運送,到達自選暫停點后暫停,點亮黃色指示燈,等待小車 1 卸載;小車 1 卸載藥品后開始返回,同時控制小車 2 熄滅黃色指示燈,繼續運送。(從小車 2 啟動運送開始,到小車 1 返回藥房且小車 2 到達病房的總時間越短越好,不計算小車 2 黃燈亮時的暫停時間,不超過 60s)
兩個小車協同運送到不同的遠端病房送、取藥品,小車 1 送藥,小車 2 取藥。小車 1 識別病房號裝載藥品后開始運送,小車 2 在藥房處識別病房號等待小車 1 的取藥開始指令;小車 1 到達病房后卸載藥品,開始返回,同時向小車 2 發送啟動取藥指令;小車 2 收到取藥指令后開始啟動,到達病房后停止,亮紅色指示燈(從小車 1 返回開始,到小車 1 返回到藥房且小車 2 到達取藥病房的總時間越短越好,不超過 60s)
其他
如何基于梁山派制作一個送藥小車
從上面的題目我們可以分析出,完成題目的基礎要求有這些:
主控
驅動小車前進和轉彎的動力裝置(只能用普通車輪)
驅動方式選擇
后驅+前置舵機轉向方式(就是平常路上開的那種小轎車的結構,適用于路線直角轉彎比較少的地方,相信大家也知道汽車過直角彎有多麻煩,這種對轉彎半徑要求較高,并且還需要考慮后兩輪差速問題)
四輪驅動+差速轉彎(比如最近比亞迪新出的仰望 U8,他的輪子由四個電機獨立控制,每一個電機可以單獨控制輪子實現正轉和反轉,當左側兩個輪子和右側兩個輪子以相反的方向轉動時,就可以實現原地轉向)
兩輪驅動+萬向輪||牛眼輪(對于這個比賽我認為用兩個輪子+一個或兩個從動輪就夠用了,而且輪子電機少,做出來的小車尺寸也更小,不容易壓到題目中說的走廊邊緣。這個的轉彎就是給兩個電機不同的轉動方向就行了)
電機選擇
直流減速有刷電機
轉速范圍廣,轉速高,扭矩大。
控制簡單,使用方便。
價格低廉。
需要外接減速器,體積較大。
轉速波動較大,精度不高。
不適合高精度運動控制。
轉動精度高,不需要編碼器。
可以實現高精度定位和運動控制。
適合低速高精度運動。
轉矩小,轉速慢。
需要驅動器,控制復雜。
價格相對較高。
FOC 無刷電機
轉速范圍廣,轉速高,扭矩大。
轉速精度高,控制精度高。
能夠實現高效能、低噪音的運行。
硬件成本相對較高。
控制復雜,需要配合專門的控制器使用。
對控制算法的要求較高。
直流電機電機驅動選擇
輪子選擇
檢測地圖中紅線以及檢測門口區域(黑色)
視覺識別
Openmv(現在最火的嵌入式機器視覺模塊,使用 MicroPython 驅動,可以把它當成一個可編程攝像頭)
K210(是國內廠家勘智研發的一款采用 RISC-V 處理器架構,典型設備功耗 1w,算力1TOPS 的 AI 芯片,自帶 SRAM,可以在本地完成數據的處理和存儲,國內廠家也根據 openmv 的 IDE 重新制作了 Canmv IDE 和 Maixpy IDE)
樹莓派,卡片個人電腦,可以在上面直接運行 OpenCV,進行循跡和數字識別,性能比上面兩個都強得多,但是開發難度也是最大的,它可以用很高清的攝像頭,用它來參賽簡直可以說是降維打擊。
光電二極管灰度傳感器(主要是利用光電二極管對光線的敏感性,通過測量物體表面反射的光線強度來確定物體表面的灰度值,探測到不同顏色地面時會產生不同的電壓值,電壓值會隨被測面的顏色變化而變化,所以理論上可以識別任意顏色)
模擬式(模擬式需要單片機自帶 AD 采集(模擬量采集),采集到的信息更準確,需要在單片機端自己設置閾值來進行判斷當前識別的顏色)
數字式(他就是基于模擬式,一般會自帶一個處理芯片或者比較器,通過手動調整電路板上的旋轉電阻器來設置靈敏度,針腳直接輸出的就是高低電平)
紅外反射傳感器(只適用于黑線識別,調整非常麻煩,基本上是不能用,雖然他簡單,不易受光線影響,但是他是無法區分白和紅的,而本次題目中是紅線)
線性CCD,可以說他是只有一個像素的攝像頭,是一個一維的攝像頭,他可以很容易識別紅色與白色。
小車底板和固定藥品裝置,固定攝像頭機構,供電電池,緊急開關
小車底板一般常用的板材有
亞克力板
碳纖板
玻纖板
電木板
鋁合金板
固定藥品裝置
固定攝像頭裝置
供電電池
緊急開關
用來識別任務目標房號和走廊上房號的數字識別模塊
用來指示小車工作狀態的的 LED 燈
Reverse Voltage: 5V(最大反向電壓,超過這個就會壞)
Forward Current: (正向電流)
R: 25mA
G: 25mA
Y: 25mA
Forward Voltage: (正向電壓)
R: 2.0V
G: 3.3V
Y: 2.0V
R:電阻值:120Ω,功率 0.075 -貼片電阻 0603 以上-立創商城編號:C22787
G:電阻值:68Ω,功率 0.0425 -貼片電阻 0402 以上-立創商城編號:C25254
Y:電阻值:120Ω,功率 0.075 -貼片電阻 0603 以上-立創商城編號:C22787
用于雙車通訊的無線模塊
WiFi 模塊:WiFi 模塊可以實現高速無線網絡連接,但是其功耗較高,不適合低功耗應用。
藍牙模塊:藍牙模塊具有低功耗、短距離通信等特點,但是其傳輸速率較慢,適用于數據量較小的場景。
Zigbee 模塊:Zigbee 模塊具有低功耗、低成本、自組網等特點,適用于物聯網應用。
LoRa 模塊:LoRa 模塊具有長距離、低功耗、低成本等特點,適用于物聯網應用。
NB-IoT 模塊:NB-IoT 模塊具有低功耗、廣覆蓋等特點,適用于物聯網應用。
其他附加
可以加一個無源蜂鳴器來進行提示和報警,當電池電壓過低或者出現錯誤時進行蜂鳴器報警。
可以加一個六軸或者九軸的姿態傳感器,通過姿態解算可以得到當前航向角,可以讓小車在一定時間內保持車頭朝向不變,這樣就算車輪打滑小車的車頭朝向也不會大變。但是這個方法對姿態傳感器的數據要求和算法處理的要求也很高。
預留灰度傳感器的接口,別萬一識別巡線效果拉了,硬著頭皮也走不下去就G了,多給自己留條后路。
加一個 CAN 芯片,如果你想用 can 芯片控制電機的話就可以用了,大疆的 robomaster 系列電機和市面上的一些高性能電機都是可以用 CAN 通訊來控制的
加一個 sbus 電路,參加完比賽做個小遙控車也不錯。
-
單片機
+關注
關注
6078文章
45550瀏覽量
672782 -
智能小車
+關注
關注
87文章
565瀏覽量
83499 -
GD32
+關注
關注
7文章
434瀏覽量
27538 -
LoRa
+關注
關注
355文章
1908瀏覽量
238326
發布評論請先 登錄
沐曦股份與百度飛槳黑客松硬核賽題來襲

啟明云端WTDKP4C5-S1開發板入選樂鑫2026“全國大學生嵌入式芯片與系統設計競賽”推薦開發板名單

工程師必入!288 元解鎖賽靈思開發板

賽元MB0036核心開發板(評測)
openDACS 2025 開源EDA與芯片賽項 賽題七:基于大模型的生成式原理圖設計
【精選直播】openDACS 2025 開源EDA與芯片大賽 賽題五 賽題七 直播宣講會

【精選直播】openDACS 2025 開源EDA與芯片大賽 賽題六 賽題三 直播宣講會
【精選直播】openDACS 2025 開源EDA與芯片大賽 賽題二 賽題四 直播宣講會
【精選直播】openDACS2025開源EDA與芯片賽宣講 賽題一:網表評估和優化
【賽題補充說明】2025全國大學生FPGA創新設計競賽紫光同創杯賽

【賽題教程】基于RK3568+PG2L50H實現八路視頻輸入參考方案
【嘉楠堪智K230開發板試用體驗】高校競賽-2025電賽-E題
【賽題知多少】 紫光同創賽題答疑專場|2025年全國大學生嵌入式芯片與系統設計競賽FPGA賽道
挑戰杯丨2025中國青年科技創新“揭榜掛帥”擂臺賽啟動,誠邁科技賽題等你來戰!

【賽題宣講會通知】2024全國大學生FPGA創新設計競賽紫光同創賽道專場




 工商網監
工商網監
評論