") 無人機(jī)視覺跟蹤系統(tǒng)解決方案-米爾基于XCZU3EG/XCZU4EV/XCZU5EV核心板
無人機(jī)視覺跟蹤系統(tǒng)解決方案-米爾基于XCZU3EG/XCZU4EV/XCZU5EV核心板

近些年來,隨著自動控制領(lǐng)域的發(fā)展,攝像鏡頭的工藝和視覺識別算法越來越完善,基于這一基礎(chǔ),無人機(jī)視覺跟蹤技術(shù)成為炙手可熱的研究領(lǐng)域。什么是無人機(jī)視覺跟蹤技術(shù)呢?首先無人機(jī)通過攝像頭進(jìn)行視頻采集,對采集的信息進(jìn)行存儲,并通過算法識別設(shè)定的跟蹤目標(biāo),執(zhí)行預(yù)設(shè)任務(wù)。目前無人機(jī)視覺跟蹤技術(shù)已經(jīng)廣泛運(yùn)用在農(nóng)業(yè)生產(chǎn),軍事科研,物流運(yùn)輸?shù)阮I(lǐng)域。
在農(nóng)業(yè)生產(chǎn)領(lǐng)域,無人機(jī)視覺追蹤系統(tǒng)運(yùn)用在識別農(nóng)作物的生長情況中,進(jìn)行高空灌溉、驅(qū)趕害蟲等自動化農(nóng)業(yè)管理;在民用領(lǐng)域,無人機(jī)通常使用視覺跟蹤系統(tǒng)識別人體手勢,讓用戶通過手勢操控?zé)o人機(jī)的升降和擺動;在生物調(diào)研領(lǐng)域,該技術(shù)更多是為了追蹤記錄野生瀕危動物的生活習(xí)慣,維護(hù)生態(tài)系統(tǒng)平衡。
無人機(jī)跟蹤系統(tǒng)是如何組成的呢?首先,無人機(jī)通過高清攝像頭模塊,實(shí)時采集圖像數(shù)據(jù),系統(tǒng)通過信號檢測模塊和圖像預(yù)處理模塊將圖片信息轉(zhuǎn)變成數(shù)字信息,然后通過數(shù)據(jù)采集與處理模塊進(jìn)行采樣、量化,并對各圖片參數(shù)進(jìn)行分析過濾;將分析結(jié)果與設(shè)定的跟蹤目標(biāo)比較,進(jìn)行圖像識別跟蹤;跟蹤的圖像信息可以通過網(wǎng)絡(luò)傳輸?shù)?a href="http://www.3532n.com/v/tag/107/" target="_blank">手機(jī)和電腦實(shí)時顯示。
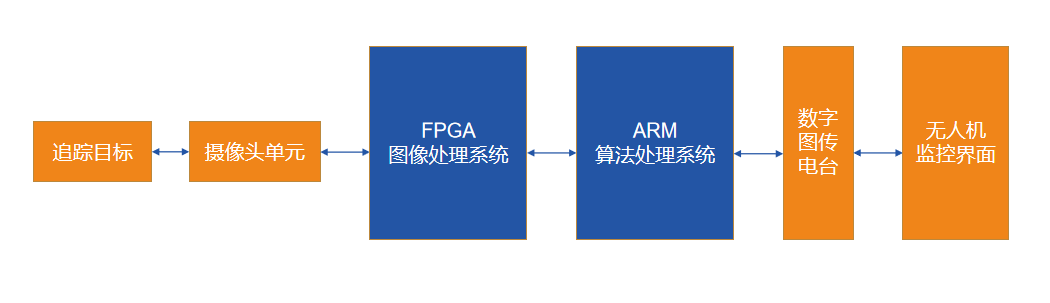 無人機(jī)視覺跟蹤流程圖
無人機(jī)視覺跟蹤流程圖
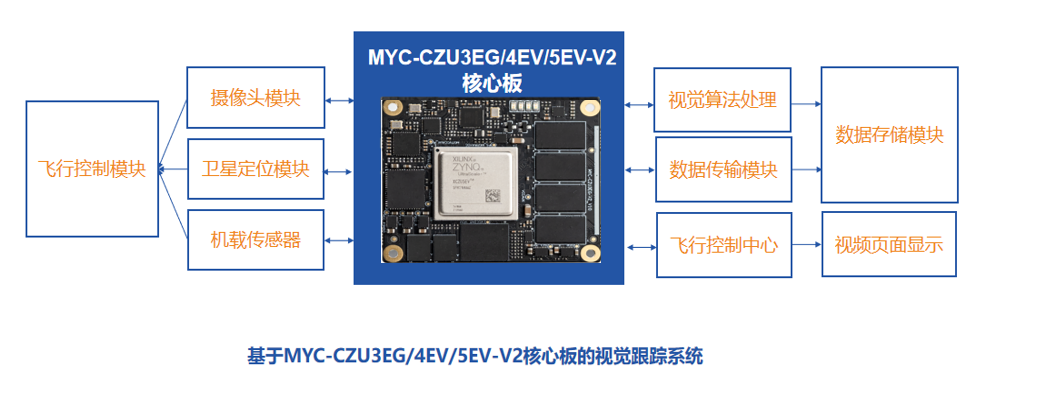
基于米爾電子MYC-CZU4EV/5EV-V2核心板設(shè)計(jì)的無人機(jī)視覺跟蹤系統(tǒng),可以分為圖像信號采集、數(shù)據(jù)處理、信息展示三部分;圖像采集主要通過攝像頭收集圖像信息,再由FPGA芯片高速采集將圖片信息傳輸?shù)綌?shù)據(jù)處理單元,數(shù)據(jù)處理單元由VCU和MCU組成,負(fù)責(zé)將采集的圖像數(shù)據(jù)通過算法把設(shè)定好的跟蹤目標(biāo)進(jìn)行標(biāo)注處理;而信息展示部分,則通過無線傳輸系統(tǒng)把信息同步顯示到無人機(jī)控制平臺和APP上面,實(shí)現(xiàn)實(shí)時視頻傳輸,掌握遠(yuǎn)程定位追蹤功能。
 ??
??
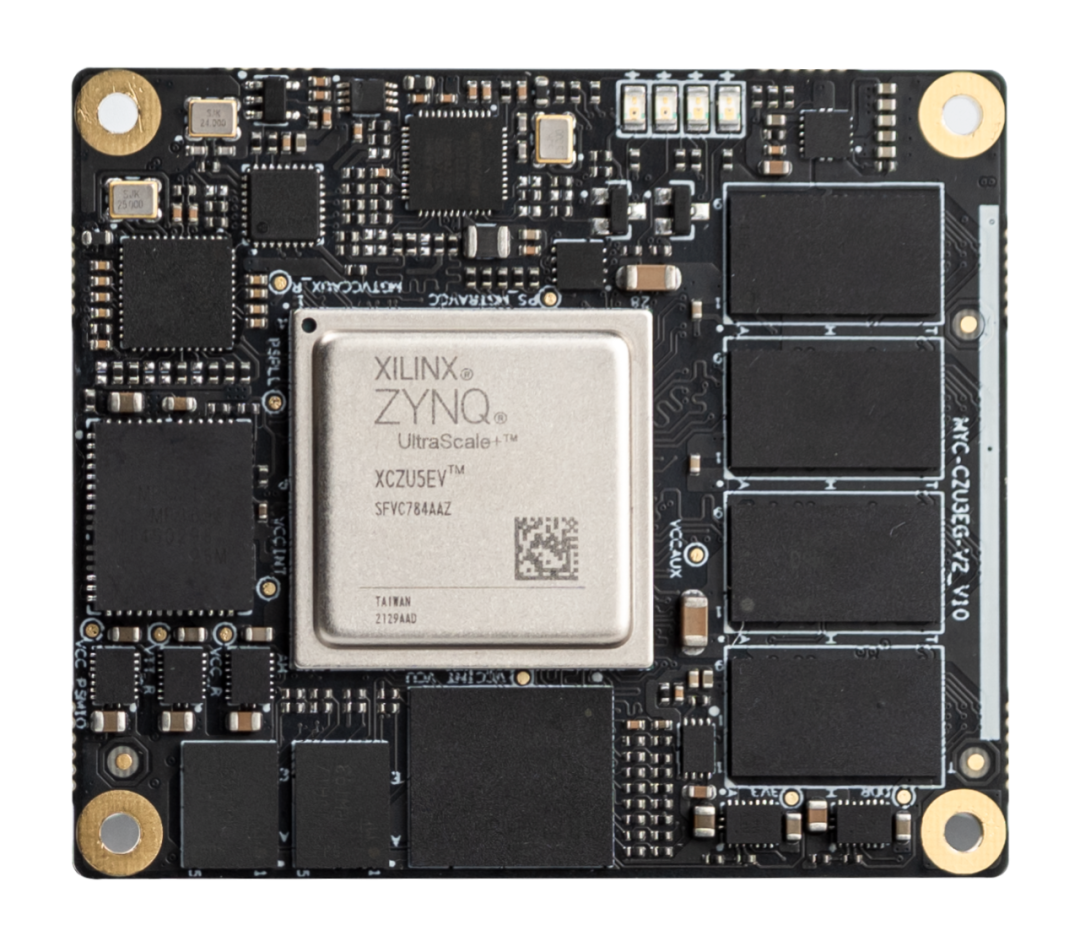
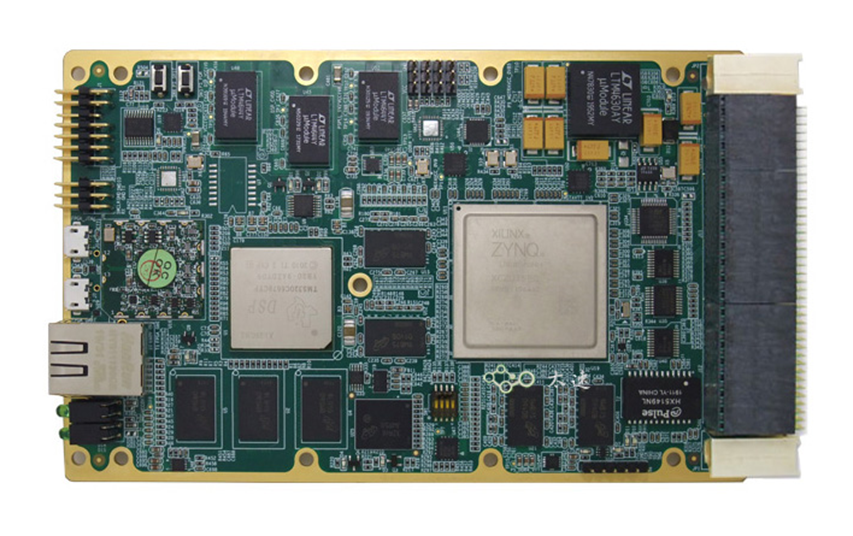
MYC-CZU3EG/4EV/5EV-V2核心板,搭載功能全面的高規(guī)格Zynq UltraScale+ MPSoC芯片,其中芯片的PS端集成了APU ARM Cortex-A53處理器,RPU Cortex-R5處理器,頻率高達(dá)667MHz的Arm Mali-400 MP2(GPU)。需要注意的是,4EV/5EV芯片比3EG芯片多了一個視頻編解碼器單元 (VCU),支持H.264/H.265編解碼。芯片搭載內(nèi)部存儲器,外部存儲器接口(DDR)和外設(shè)接口。這些外設(shè)接口主要包括USB總線接口,以太網(wǎng)接口,SD/eMMC接口,I2C總線接口,CAN總線接口,UART接口,GPIO等。高速接口如 PCIE,SATA,Display Port。
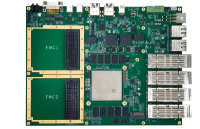
核心板圖片:
 ?
?
板卡資料:
機(jī)械參數(shù)
類型 | 分類 | 參數(shù) |
工作溫度 | 工業(yè)級 | -40℃~+85℃ |
商業(yè)級 | 0°C~+70°C | |
環(huán)境溫度 | -50℃~100°C | |
工作濕度 | 非冷凝 | 20%~90% |
冷凝 | 不支持 | |
電源供電 | 核心板 | 3.3V/5A |
核心板接口 | 2個160 Pin 0.5mm間距雙排高速高密度PCB連接器 | |
PCB規(guī)格 | 核心板 | 12層盲埋孔,沉金工藝生產(chǎn),獨(dú)立的接地信號參考層,無鉛 |
機(jī)械尺寸 | 核心板 | 60.0mmx52.0mm,板厚1.6mm,核心板模塊整體厚度約為8.25mm |
底板資源
序號 | 資源種類 | |||
PS 單元 | 1 | 1 路千兆以太網(wǎng) | ||
2 | 1路USB3.0typeC接口 | |||
3 | 1路Display Port接口 | |||
4 | 1路PCIE 2.1x1接口 | |||
5 | 1路SATA 3.1接口 | |||
6 | 1路CAN接口 | |||
7 | 1路RS232串口 | |||
8 | 1路TF卡接口 | |||
9 | 1路I2C接口 | |||
10 | 1個復(fù)位按鍵,2個用戶按鍵 | |||
11 | 1路JTAG | |||
12 | 內(nèi)置實(shí)時時鐘 | |||
序號 | 資源種類 | |||
PL 單元 | 1 | XADC接口 | ||
2 | 1路Xilinx標(biāo)準(zhǔn)LPFMC接口 | |||
3 | ||||
4 | 1路LCD DIP/LPC接口,RGB 24bit,與HDMI復(fù)用顯示信號 | |||
5 | ||||
6 | 2路PMoD | |||
7 | 5個電源指示燈 | |||
8 | 4路SFP+模塊接口(注:僅4EV/5EV使用) | |||
9 | 1路Arduino接口 | |||
-
核心板
+關(guān)注
關(guān)注
6文章
1399瀏覽量
32013 -
米爾電子
+關(guān)注
關(guān)注
2文章
189瀏覽量
1071
發(fā)布評論請先 登錄
索尼FCB-EV9500L與CM2001S SDI編碼板:賦能無人機(jī)云臺的專業(yè)級影像解決方案
基于無人機(jī)搭載FCB - EV9520L機(jī)芯的可視化應(yīng)急指揮系統(tǒng)
賦能低空經(jīng)濟(jì):索尼FCB-EV7100與SDI編碼板CM2001S的工業(yè)級視覺解決方案
高清協(xié)同,智聯(lián)空天:USB編碼板CM2001U與索尼FCB-EV9500L重塑無人機(jī)視覺系統(tǒng)
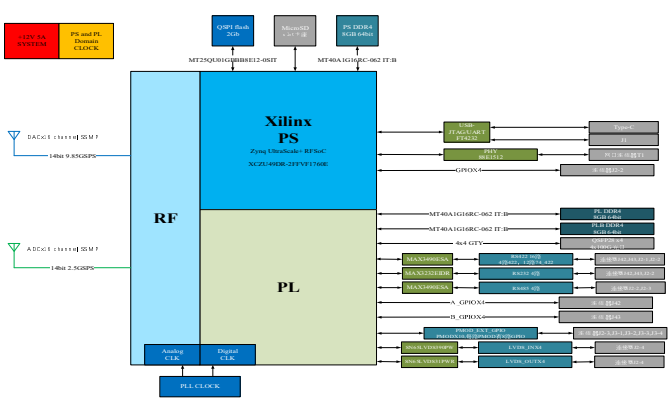
數(shù)字陣列板卡設(shè)計(jì)原理圖:889-基于RFSOC XCZU49DR的 16T16R的軟件無線電硬件
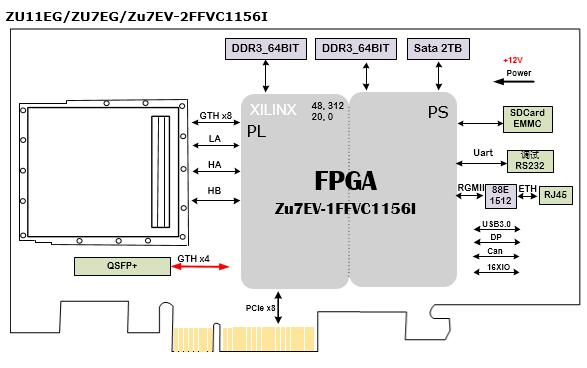
【TES817】青翼凌云科技基于XCZU19EG FPGA的高性能實(shí)時信號處理平臺
光纖圖像處理卡設(shè)計(jì)原理圖:520-基于ZU15EG 適配AWR2243的雷達(dá)驗(yàn)證底板 XCZU15EG架構(gòu)高速信號處理板
RK3576賦能無人機(jī)巡檢:多路視頻+AI識別引領(lǐng)智能化變革
SDI編碼板+FCB-EV9520L:應(yīng)急救援無人機(jī)的“穿透視覺”新方案
圖像信號分析處理卡設(shè)計(jì)原理圖:536-基于FMC接口的XCZU7EV 通用PCIe卡 視覺處理卡 工業(yè)控制卡
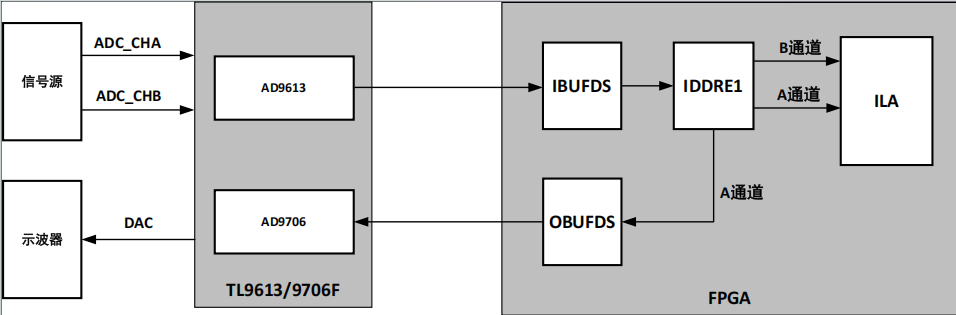
基于AD9613與Xilinx MPSoC平臺的高速AD/DA案例分享
XILINX XCZU67DR FPGA完整原理圖
527-基于3U VPX XCZU15EG+TMS320C6678的信號處理板



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論