 這款三維空間導航模塊,為您的巡檢機器人賦能
這款三維空間導航模塊,為您的巡檢機器人賦能

多傳感器、高精度、多接口的定位導航模塊是智司為了賦予各類機器人在各種地形中定位、導航、避障等能力而研發生產的產品,現已運用在室外機器人巡檢、機器人環境感知、多機器人協同等場景。
產品特點
適配任意底盤,通用性強
無論哪一款機器人底盤,無論是人形還是機械狗,無論是輪式還是履帶,無論是否是機器人,都能夠使用這款導航模塊。
小小身體,大大能量
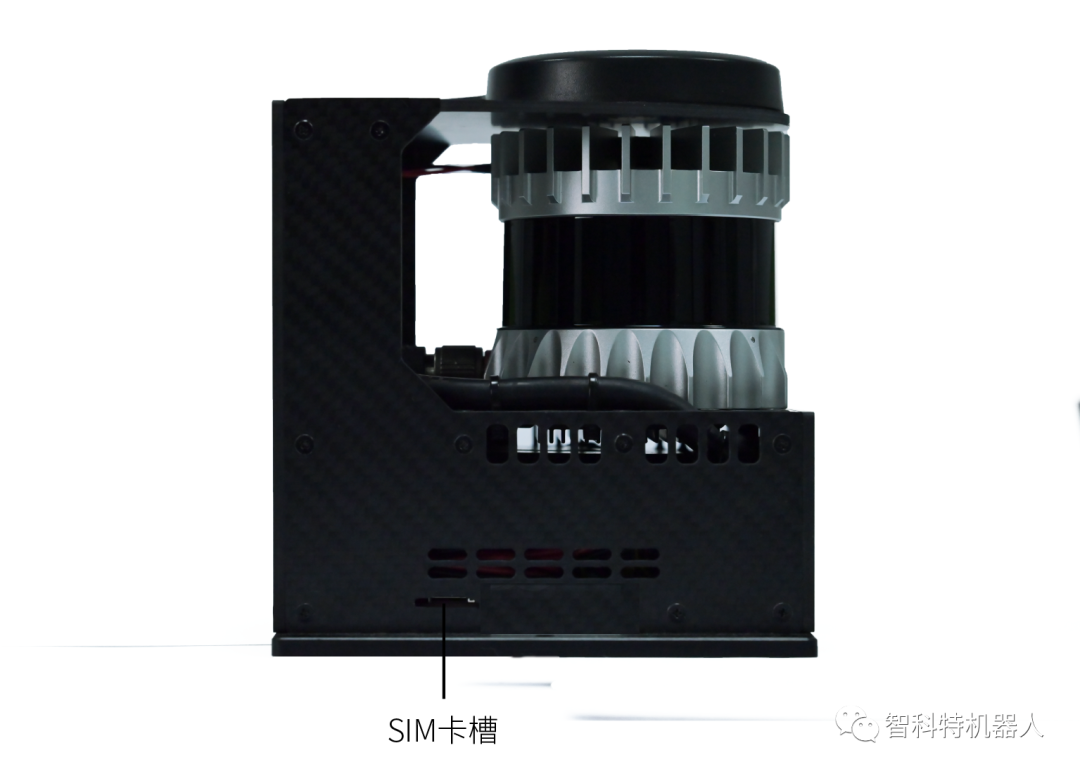
整個模塊只有巴掌大小,包含了機器人大腦與各類傳感器,單一模塊能夠完成自主測控、處理信息、定位導航等任務。
獨立模塊,即插即用
有手即可安裝,不需調試即可使用,產品軟硬件完成度極高,讓你快速深入自己的研究任務中。


參數表
| 智科特導航模塊 | |
| 激光雷達 | Ouster OS0-32 |
| 范圍:0.3-50m | |
| 精度:0.3 - 1 mL:±2 cm,1 - 10 m:±1 cm;10 - 15 m:±1.5 cm;>15 m:± 5 cm | |
| 水平視角:360° /垂直視角:±45° | |
| 測距:0.3cm | |
| 垂直分辨率:2.8°(32線),水平分辨率:0.35°(1024線) | |
| 激光等級:Class 1 人眼安全,符合 IEC/EN 60825-1: 2014 | |
| IMU | 型號:InvenSense ICM-20948 |
| 3軸陀螺儀,三軸加速度計 | |
| 最大量程±8g,±1000°/s | |
| 單目相機 | 視場角:110° |
| 分辨率:1280X730 | |
| 幀率:30FPS | |
| 機載計算機 | Intel NUC i5 Gen11 |
| 外部端口 | HDMI,USB3.0,RJ-45網口 |
| 操作系統 | Ubuntu 20.04 |
| 全局定位系統 | GPS:L1,L2;BEIDOU:B1,B2;GLONASS:G1,G2;Galileo:E1,E5 |
| 差分定位精度:平面<2CM、高程<5CM | |
| 輸出頻率:10Hz | |
| 重量 | 1.5KG |
| 操作溫度 | 0°-50° |
| 電源 | 外置電池包,直流供電 |
| 電池工作時間 | 3小時 |
| 掛載方式 | 手持,機載 |
| 建圖頻率 | 10Hz |
| 輸出格式 | .pcd(3D) |
| 后期處理 | 地面校正,平面校正,全局閉環檢測,地圖拼接,離線地圖優化 |
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222259
發布評論請先 登錄
相關推薦
熱點推薦
沉船殘骸、古代港口遺址的光學三維掃描測量逆向-激光三維掃描儀
需控制在±0.1mm內,水下殘骸銹蝕層、遺址破損區域需無損傷記錄,傳統考古測繪易造成二次破壞,且難以還原三維空間布局。激光三維掃描儀憑借非接觸式、低損傷、全維度掃描優勢,成為此類遺址逆向測繪、數字化存檔與考古研究的

杰和IB3-771:以RK3588賦能機場巡檢機器人
設備擴展”為核心能力,為機場巡檢機器人注入AI智慧,構建全天候、無死角的安全防護體系。IB3-771的核心優勢源于RK3588的6TOPSNPU算力與本地數據處理

RTK-SCAM-60雙目相機規格書
產品概述本產品是一款高精度、5V供電的雙目立體視覺相機。它由兩個經過精密同步和校準的獨立相機組成,固定基線為60mm,專為三維空間感知與距離測量而設計。通過內置的立體匹配算法,可直接輸出高精度

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
,以其"三屏異顯"和"八路攝像頭"的強悍能力,為機器人開發者提供了前所未有的強大算力平臺。米爾電子基于其MYD-LR3576
發表于 10-29 16:41
深度解讀人形機器人電感產品需求及應用選型技巧
不同場景對電感器的高性能需求,并被廣泛應用于機器人通信導航模塊、電源模塊、電機驅動模塊、機器人控制板等模
巡檢機器人落地攻略:RK3576驅動12路低延遲視覺
場景化 · 可執行 · 指標清晰 · 調優可復用01|從“人巡”到“機巡”:電力站一周上線紀實周一,項目組進場。需求很直接:變電站夜間值守薄弱、盲區多、報警后回看取證慢;希望一臺巡檢機器人替代夜巡
發表于 10-24 16:53
橋接智能制造:PROFINET與Devicenet混合架構賦能汽車擦凈機器人升級
橋接智能制造:PROFINET與Devicenet混合架構賦能汽車擦凈機器人升級

詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統、定位系統、導航系統、智能交互系統和運動系統協同工作,來實現為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統
傳感器類型 :機器人配備了多種傳感器
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
的cv_bridge庫,可以輕松實現ROS圖像消息與OpenCV格式的轉換,這在實際開發中極為便利。
視覺巡線與二維碼識別的應用
視覺巡線是機器人自主導航的經典案例,書中從仿真到真實機器人
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
整書的內容非常多有476頁。非常厚,像本厚厚的工具書
拿出文章中的小節加以書寫吧
視覺應用:二維碼識別
二維碼識別是視覺應用中的一個重要部分,它在機器人導航、物品追蹤和信息交互等方面有
發表于 04-27 11:42
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
出有用的信息,如障礙物的位置和形狀。對于攝像頭數據,可以使用 OpenCV 等圖像處理庫進行圖像識別、目標跟蹤等操作,為機器人的導航和決策提供支持。
運動控制:運動控制是機器人開發的核
發表于 04-27 11:24
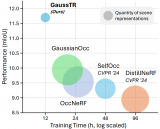
一種基于基礎模型對齊的自監督三維空間理解方法
三維空間理解是推動自動駕駛、具身智能等領域中智能系統實現環境感知、交互的核心任務,其中3D語義占據預測 (Semantic Occupancy Prediction) 對三維場景進行精準的體素級建模。然而,當前主流方法嚴重依賴大規模標注數據,制約了模型的可擴展性和泛化能力



 工商網監
工商網監
評論