 瑞薩e2studio----定時器GPT配置輸入捕獲
瑞薩e2studio----定時器GPT配置輸入捕獲


1.概述
本篇文章主要介紹如何使用e2studio對瑞薩單片機定時器輸入捕獲,同時輸入一個PWM驗證是否正確。
2.硬件準備
首先需要準備一個開發板,這里我準備的是芯片型號 R7FA2L1AB2DFL 的開發板。
3.新建工程

4.工程模板
5.保存工程路徑
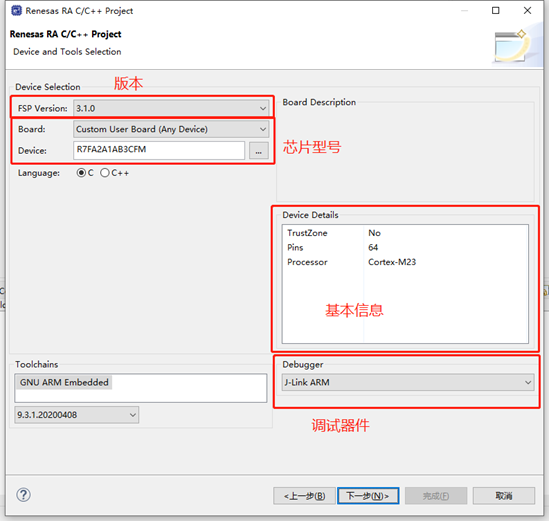
6.芯片配置
本文中使用R7FA2L1AB2DFL來進行演示。
7
7.工程模板選擇
8.選擇定時器

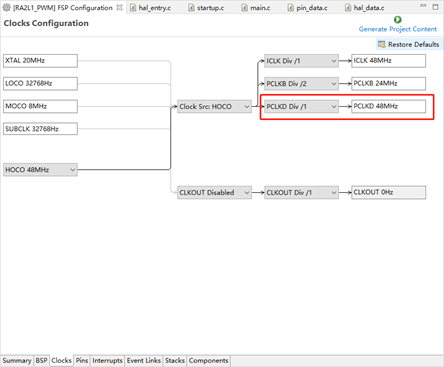
時鐘源在這設置的是PCKLD 48M 。
可以通過修改該頻率來修改占空比頻率。
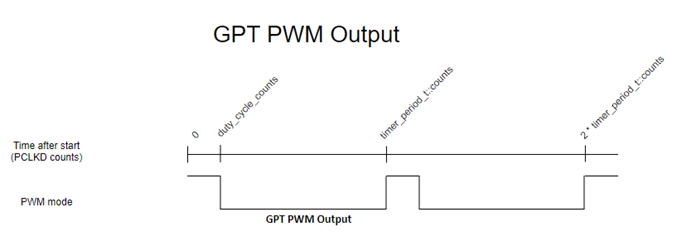
9.PWM(脈沖寬度調制)
脈沖寬度調制是一種模擬控制方式,根據相應載荷的變化來調制晶體管基極或MOS管柵極的偏置,來實現晶體管或MOS管導通時間的改變,從而實現開關穩壓電源輸出的改變。這種方式能使電源的輸出電壓在工作條件變化時保持恒定,是利用微處理器的數字信號對模擬電路進行控制的一種非常有效的技術。脈沖寬度調制是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中。
在瑞薩RA系列MCU中有兩種定時器,一種是通用PWM定時器GPT,另外一種是異步通用定時器AGT。
頻率=主頻/period
+占空比=cycle/period
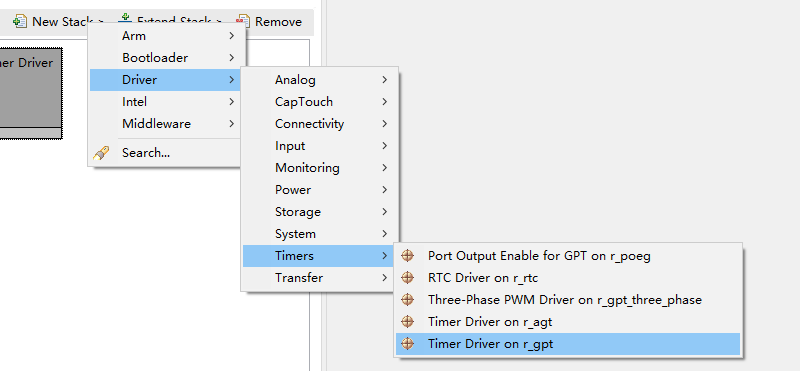
10.定時器配置
點擊Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
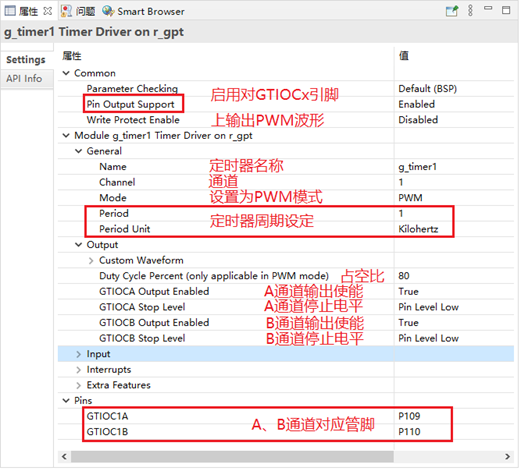
11.定時器輸出PWM配置
設置PWM輸出,輸出頻率為1kHz,占空比為80%。
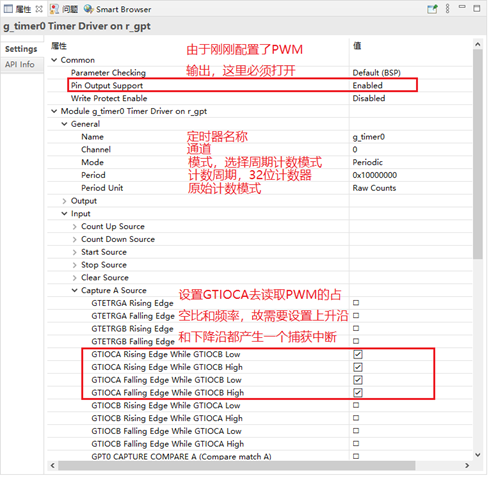
12.定時器輸入捕獲配置
點擊Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
設置定時器輸入捕獲,由于需要讀取PWM的占空比和頻率,故需要設置上升沿和下降沿都產生一個捕獲中斷。
13.設置e2studio堆棧

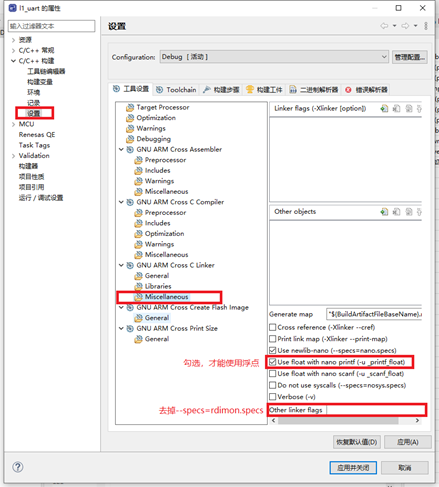
14.e2studio的重定向printf設置
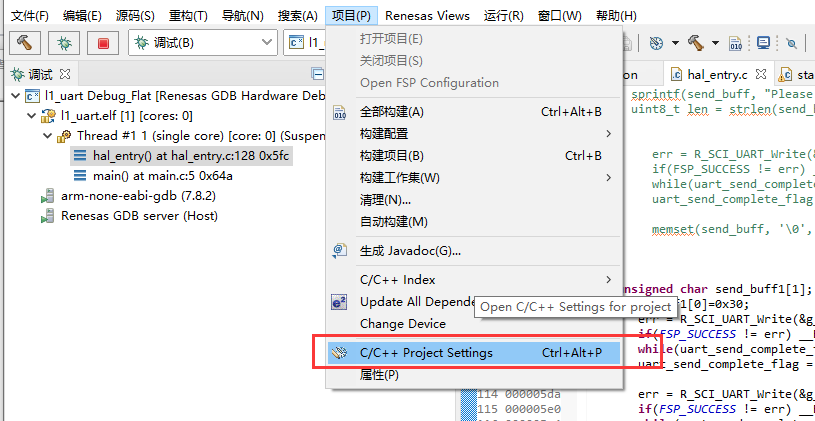
C++ 構建->設置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
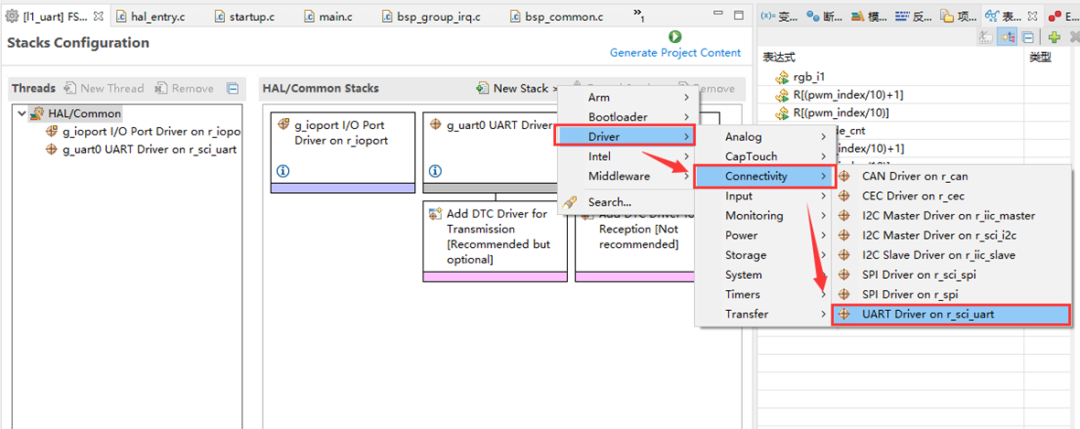
15.UART配置
點擊Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
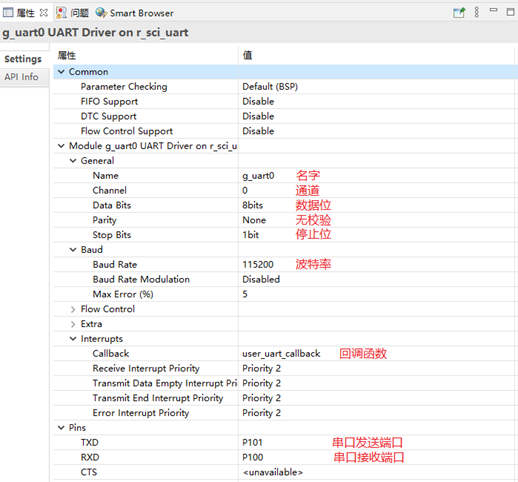
16.UART屬性配置
配置串口,用于打印數據。
17.printf輸出重定向到串口
打印最常用的方法是printf,所以要解決的問題是將printf的輸出重定向到串口,然后通過串口將數據發送出去。
注意一定要加上頭文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i;i++)>
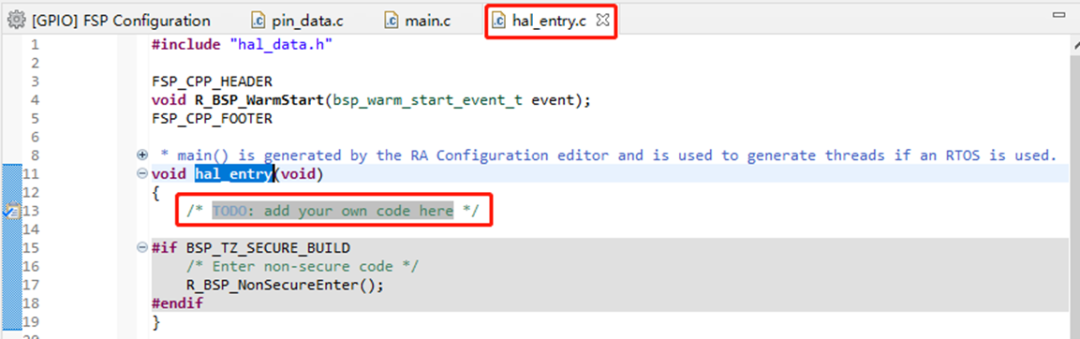
18.工廠文件
打開hal_entry.c,可以看到在hal_entry函數內,注釋著可以在這輸入自己的代碼。
19.占空比與頻率計算
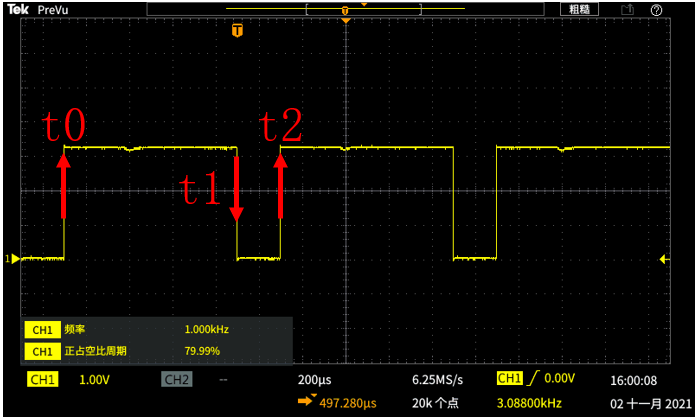
占空比=(t1-t0)/(t2-t0)
頻率=(t2-t0)/時鐘頻率= =(t2-t0)/48M
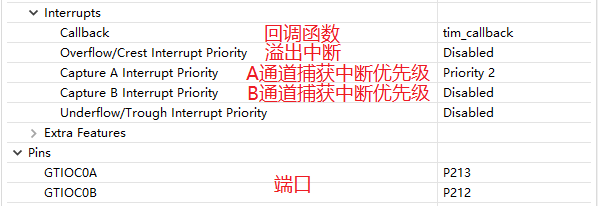
20.回調函數tim_callback()
由于設置了上升沿和下降沿都會進入回調函數中,故需要判斷引腳電平來判斷是屬于高電平還是低電平。
bsp_io_level_t p_port_value_port_213;
/*讀取端口電平狀態,如果是低電平則發生的是下降沿,高電平則是上升沿*/
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_13, &p_port_value_port_213);
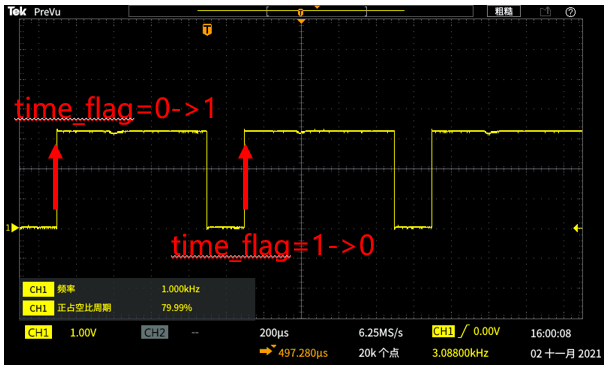
周期需要2個上升沿去判斷,設定第一個上升沿time_flag由0變為1,則第二個上升沿則為time_flag由1變為0.
計算周期需要注意定時器周期計數器溢出,若存在time_flag= 0->1讀取的計數值大于time_flag= 1->0讀取的計數值,則一個周期為g_capture_num = current_period_counts + g_capture_num1 - g_capture_num0。
若沒有溢出,則g_capture_num = g_capture_num1 - g_capture_num0。
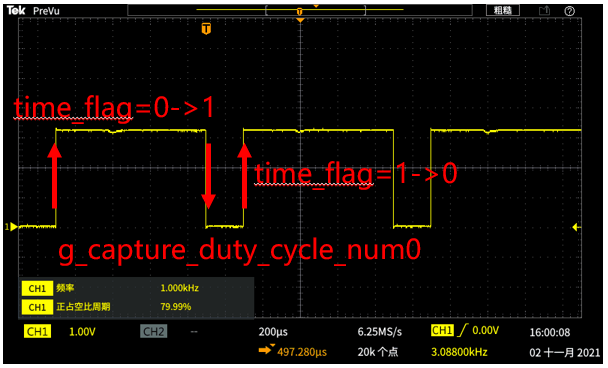
頻率則需要計算下降沿到time_flag=1的一個周期,在除以g_capture_num(48M)。
計算頻率需要注意定時器周期計數器溢出,若存在time_flag= 0->1讀取的計數值大于g_capture_duty_cycle_num0讀取的計數值,則一個周期為g_capture_num = current_period_counts + g_capture_num1 - g_capture_num0。若沒有溢出,則g_capture_duty_cycle_num = g_capture_duty_cycle_num0 - g_capture_num0。
21.代碼
#include "hal_data.h"
#include
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;//串口發送完畢標志位
volatile bool time_flag = 0;//上升沿標志位
volatile uint64_t g_capture_num =0;//兩個上升沿之間的周期
volatile uint64_t g_capture_num0 =0;//第0個上升沿定時器計數值
volatile uint64_t g_capture_num1 =0;//第1個上升沿定時器計數值
volatile uint64_t g_capture_frequency = 0;//頻率
volatile float g_capture_duty_cycle =0;//占空比
volatile int g_capture_duty_cycle_num =0;//+占空比周期
volatile uint64_t g_capture_duty_cycle_num0 =0;//下降沿定時器計數值
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;ievent) || (TIMER_EVENT_CAPTURE_B == p_args->event))
{
bsp_io_level_t p_port_value_port_213;
/*讀取端口電平狀態,如果是低電平則發生的是下降沿,高電平則是上升沿*/
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_13, &p_port_value_port_213);
/* Get the current period setting. */
timer_info_t info;
(void) R_GPT_InfoGet(&g_timer0_ctrl, &info);
uint64_t frequency = info.clock_frequency;//定時器時鐘頻率
uint32_t current_period_counts = info.period_counts;//定時器周期
if(p_port_value_port_213==BSP_IO_LEVEL_HIGH)//上升沿
{
if(time_flag==0)
{
time_flag=1;
g_capture_num0=p_args->capture;
g_capture_duty_cycle_num=0;
}
else
{
time_flag=0;
g_capture_num1=p_args->capture;
if(g_capture_num1>=g_capture_num0)
g_capture_num=g_capture_num1-g_capture_num0;
else
g_capture_num=current_period_counts+g_capture_num1-g_capture_num0;
g_capture_frequency= frequency/g_capture_num;//計算頻率
}
}
else
{
if(time_flag==1)
{
g_capture_duty_cycle_num0=p_args->capture;
if(g_capture_duty_cycle_num0>=g_capture_num0)
g_capture_duty_cycle_num=g_capture_duty_cycle_num0-g_capture_num0;
else
g_capture_duty_cycle_num=current_period_counts+g_capture_duty_cycle_num0-g_capture_num0;
g_capture_duty_cycle=(g_capture_duty_cycle_num*100/(float)g_capture_num);//占空比
}
}
}
}
void hal_entry(void)
{
/* TODO: add your own code here */
err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
/* Initializes the module. */
err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer0_ctrl);
/* Enable captures. Captured values arrive in the interrupt. */
(void) R_GPT_Enable(&g_timer0_ctrl);
/* Initializes the module. */
err = R_GPT_Open(&g_timer1_ctrl, &g_timer1_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
R_BSP_SoftwareDelay (20, BSP_DELAY_UNITS_MILLISECONDS);
/* Start the timer. */
(void) R_GPT_Start(&g_timer1_ctrl);
R_BSP_SoftwareDelay (20, BSP_DELAY_UNITS_MILLISECONDS);
while(1)
{
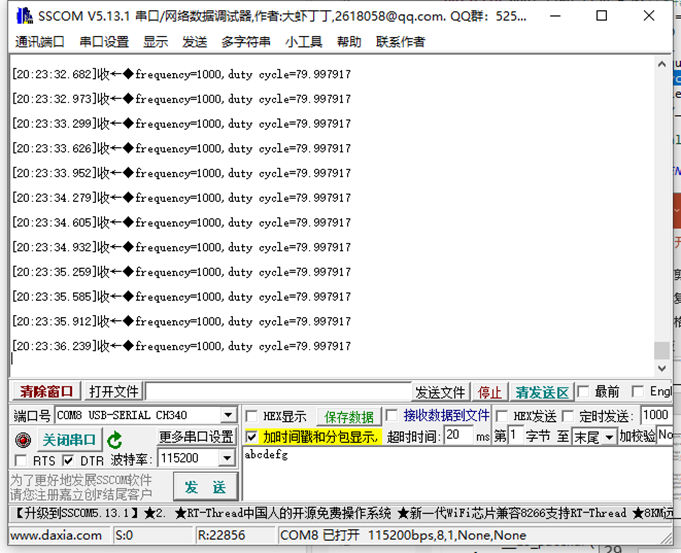
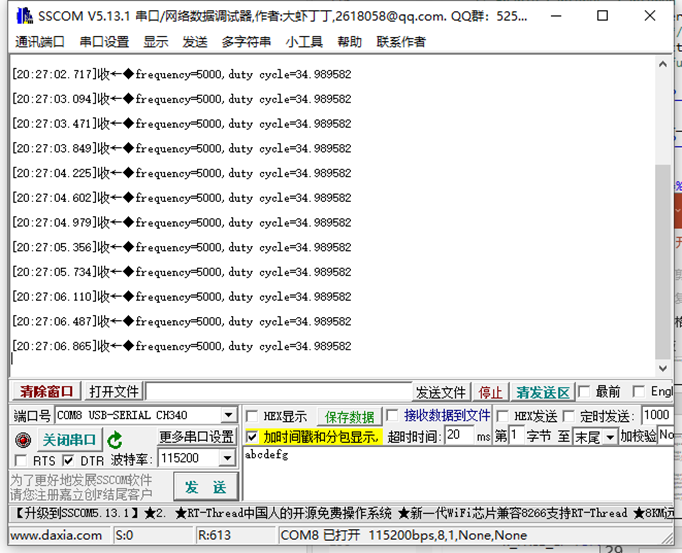
printf("\nfrequency=%lld,duty cycle=%f",g_capture_frequency,g_capture_duty_cycle);
g_capture_num=0;
g_capture_duty_cycle=0;
R_BSP_SoftwareDelay (200, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
} ;i++)>
22.結果演示
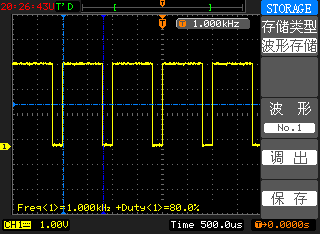
頻率1K 占空比80%
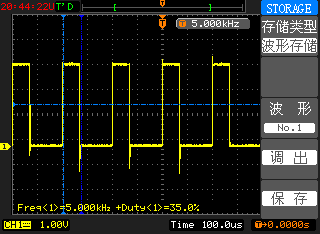
頻率5K 占空比35%
23.視頻教學
視頻教學稍后會在B站官方賬號更新,請留意B站視頻更新~

原創:ByRA_Billy Xiao
原文標題:瑞薩e2studio----定時器GPT配置輸入捕獲
文章出處:【微信公眾號:RA生態工作室】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
mcu
+關注
關注
147文章
18924瀏覽量
398002 -
ARM
+關注
關注
135文章
9552瀏覽量
391827 -
嵌入式
+關注
關注
5198文章
20442瀏覽量
333967 -
開發板
+關注
關注
26文章
6289瀏覽量
118042
發布評論請先 登錄
相關推薦
熱點推薦
瑞薩RL78/F22 MCU基于e2studio開發環境創建觸摸應用樣例工程
瑞薩RL78/F22 MCU基于e2studio開發環境創建觸摸應用樣例工程

【瑞薩RA6E2地奇星開發板試用】開發板介紹及環境搭建
一、開發板簡介
“地奇星”是立創聯合瑞薩(Renesas)推出的高性價比 Cortex-M33 入門級開發板,基于 R7FA6E2BB3CNE 芯片打造,主打高性能 + 安全 + 豐富外設,非常適合
發表于 12-22 00:40
【瑞薩RA6E2地奇星開發板試用】介紹、環境搭建、工程測試
RA6E2開發板 - 立創開源硬件平臺 .
開發環境
開發環境支持 e^2^ studio 和 Keil ,這里主要介紹和使用前者。
下載并安裝 瑞
發表于 12-07 15:27
【瑞薩RA6E2】瑞薩E2S軟件安裝過程,等待過程玩下97_e2 studio_ZGZZ
;amp;vd_source=7ab92f6a337b22fda39554fd6e70f01a
本報告旨在記錄基于瑞薩RA6E2 MCU評估板的初步開發體驗。主要內容包括:
軟件開發環
發表于 12-01 22:42
【瑞薩RA6E2】PWM 驅動舵機
外設使用 PCLKD 時鐘,默認設置為 2 分頻 100MHz
由于 RA6E2 只有 16 位定時器,100MHz / 50Hz = 2000000 > 65535,100
發表于 11-04 00:03
【RA4E2開發板評測】3、瑞薩RA4E2微控制器PWM輸出教程
。需要通過IOPORT配置將GPIO引腳設置為PWM輸出功能。
2. 定時器/PWM模塊配置
RA4E2的PWM功能通常由通用
發表于 09-17 09:14
【RA4M2-SENSOR】3、使用GPT定時器-PWM輸出
_cfg);
R_GPT_Start(&g_timer2_ctrl); // 啟動定時器GPT2
printf(\"實驗02 PWM實驗\\\\r\\\\n\"
發表于 09-01 15:20
瑞薩RA單片機在e2 studio環境下printf編譯出錯的問題解析
最近看到有一些網友在討論關于:瑞薩RA單片機在e2 studio環境下printf編譯出錯的問題。


【瑞薩RA2L1入門學習】+e2_studio軟件安裝及使用
一、e2_studio軟件安裝及使用
注冊e2 studio | Renesas 瑞薩電子
下載軟件
安裝
4.創建工程
更改工程位置
新
發表于 03-27 13:25
e2studio和Keil簡介及如何安裝e2studio開發環境
(簡稱為e2或e2s)是瑞薩電子的一款包含代碼開發、構建和調試的開發工具。e2studio基于開




 工商網監
工商網監
評論