") 減速器運行時如何降低齒輪噪音?
減速器運行時如何降低齒輪噪音?

齒輪驅(qū)動噪聲中的齒輪驅(qū)動噪聲已成為了行業(yè)的一個關(guān)鍵研究課題。很多外國學(xué)者指出減速器中齒輪嚙合剛度的變化是齒輪動載、振動和噪聲的主要因素。
為了降低噪音,將其動載荷和速度波動降低到最低,達到降噪的效果。這種方法在實踐中被證明是一種更有效的方法。但用這種方法,減速器工藝上需要修形設(shè)備,很多公司往往無法實施。
經(jīng)過多年的研究,提出了優(yōu)化齒輪參數(shù)的齒輪設(shè)計方法,如變位系數(shù)、齒系數(shù)、壓力角、中心距等,將嚙合沖擊速度降至較小,嚙合沖擊速度與嚙合沖擊速度的比值在一定值范圍內(nèi)。減小或嚙合節(jié)圓沖擊的減速器齒輪設(shè)計方法也能顯著降低齒輪噪聲。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
減速電機
+關(guān)注
關(guān)注
1文章
302瀏覽量
11273 -
齒輪減速電機
+關(guān)注
關(guān)注
1文章
182瀏覽量
5822
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
高壓試驗變壓器運行時,哪些操作不能做?
/T9641-1999標(biāo)準(zhǔn)和實際案例,跟大家梳理高壓試驗變壓器運行時的禁忌操作,幫你規(guī)范操作,規(guī)避風(fēng)險。首先,嚴(yán)禁調(diào)壓器不在零位時合閘通電。根據(jù)JB/T9641-1999第

伺服電機經(jīng)減速器之后的精度問題
伺服電機經(jīng)減速器之后的精度問題一直是工業(yè)自動化領(lǐng)域中的關(guān)鍵議題。減速器的引入雖然可以放大扭矩、降低轉(zhuǎn)速,但同時也可能帶來傳動誤差、回程間隙、剛性不足等問題,這些因素都會直接影響系統(tǒng)的最終定位精度
Kubernetes容器運行時containerd與CRI-O如何選擇
Kubernetes 1.24版本正式移除了dockershim,Docker不再是K8s的默認(rèn)容器運行時。這個變化直接影響了所有K8s集群的運維方式——升級到1.24+必須切換到containerd或CRI-O。
電抗器噪音太大,居然違法?教你三招安靜運行
測定》規(guī)定,電抗器在額定運行時的聲級應(yīng)符合國家或行業(yè)標(biāo)準(zhǔn)。許多地區(qū)對廠區(qū)、辦公區(qū)噪音有明確限值,晝間一般不超過5560分貝,夜間不超過4550分貝。超標(biāo)運行不僅擾

降低LDO功耗延長運行時間
響應(yīng),那么相關(guān)設(shè)備就能在維持主要性能的同時最大限度地延長整機電池的運行時間。
靜態(tài)電流是指LDO空載和非開關(guān)但啟用狀態(tài)下消耗的電流,對于LDO來說這一電流的主要貢獻來自電壓參考和誤差放大器
發(fā)表于 01-08 07:13

成都匯陽投資關(guān)于人形機器人打開增量空間,減速器國產(chǎn)替代進行時
? ? 精密減速器是人形機器人和工業(yè)機器人的重要零部件 精密減速器在工業(yè)機器人成本中占比 35%,在特斯拉人形機器人成本中占比約 16%,減速器的性能直接影響機器人的性能 。精密減速器
使用Nuclei Studio IDE計算程序運行時間
在使用Nuclei Studio IDE進行程序運行時,我們想知道我們編寫的程序運行時間有多長怎么辦呢?可以選擇調(diào)用IDE里面時間記錄函數(shù)_gettimeofday(),該函數(shù)用于記錄程序運行到本
發(fā)表于 10-28 08:25
判斷伺服行星減速機出現(xiàn)噪音的異常
伺服行星減速機在正常運行時,其噪音水平應(yīng)在一定范圍內(nèi)。若噪音突然增大或出現(xiàn)異常聲響,如尖銳、不規(guī)則或周期性的噪音,則可能表明

MTB如何在運行時介入Jlink調(diào)試器?
目前我們的應(yīng)用程序在運行時會偶發(fā)死機現(xiàn)象,有沒有辦法能夠在CYW43907芯片不復(fù)位的情況下介入調(diào)試器,查看導(dǎo)致死機的問題
發(fā)表于 07-08 07:46
PLC設(shè)備運行時間數(shù)據(jù)采集到運維管理平臺如何實現(xiàn)
在工廠設(shè)備管理工作中,往往需要統(tǒng)計各個設(shè)備的運行時間,能夠衡量其運行性能,主要為了方便管理人員對設(shè)備進行定期維護,以保障設(shè)備處于穩(wěn)定高效的運行狀態(tài),減少故障停機導(dǎo)致生產(chǎn)停工的問題。 對此,物通博聯(lián)
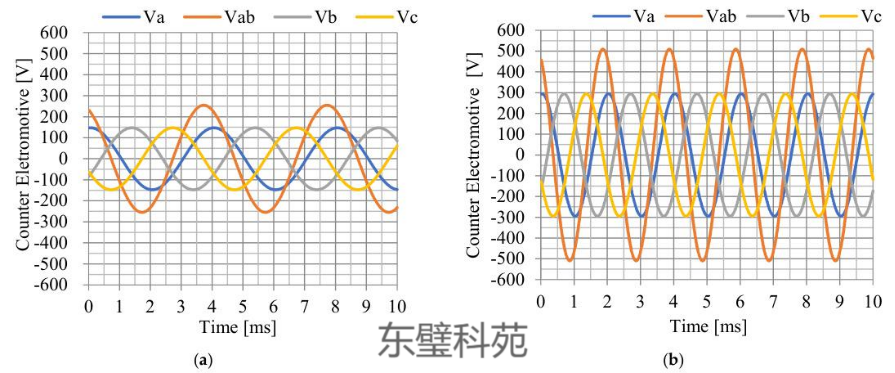
步進電機在高速運行時反電動勢波形與其動態(tài)響應(yīng)變化
步進電機高速運行時,反電動勢幅值增大、頻率升高,導(dǎo)致電流建立延遲、扭矩下降及動態(tài)響應(yīng)滯后。所以在步進電機高速運行的方案中,我們需要通過優(yōu)化電機選型(如低電感、適中極數(shù))、升壓驅(qū)動及BEMF反饋控制,可緩解高速性能衰減,避免PWM飽和導(dǎo)致的扭矩崩潰。
機器人關(guān)節(jié)諧波減速器解讀
諧波減速器在機器人關(guān)節(jié)中的作用與工作原理 諧波減速器主要由 波發(fā)生器、柔輪和剛輪 三部分構(gòu)成。工作時,波發(fā)生器上的橢圓形凸輪裝入柔輪內(nèi)部,通過滾珠軸承驅(qū)動使柔輪產(chǎn)生可控的周期性彈性變形



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論