 低電壓的柔性電子皮膚體現的神經形態感知-運動回路
低電壓的柔性電子皮膚體現的神經形態感知-運動回路

皮膚在人體中扮演著重要的角色,作為人體與外界的主要接口和保護層。它的感知能力和柔軟性使我們能夠感知外部刺激并在復雜環境中執行任務(圖1A)。然而,患有皮膚損傷或截肢的人可能會遇到感知和行動之間的困難。盡管假肢可以部分恢復運動功能,但仍存在局限性,如幻肢疼痛和手指靈活性不足,需要整合感覺反饋和柔韌性來解決。為了實現自然的人機界面,研究人員努力賦予電子系統以人體皮膚的特性。
目前,已經開發了復雜的硅電路來模擬外周神經系統,在假肢和機器人中實現類似皮膚的感知能力。然而,在一個單一的設備平臺上構建集成的、柔性的電子皮膚仍然是一個挑戰。盡管柔性電子學和電路制造取得了進展,但其應用仍受限于用于互連線路的主動矩陣陣列和傳感器信號放大。神經假肢的電子皮膚需要提供類似神經的脈沖列信號模式,以實現自然感覺和調節運動活動。雖然壓電、摩擦電和離子壓力傳感器可以生成類似尖峰列的信號模式,但生物感覺受體使用調頻信號編碼輸入幅度信息,需要信號數字化和調節電路以實現人工突觸,從而觸發身體運動(圖1B)。
最近,來自斯坦福大學的Weichen Wang等人報道了一種單片集成、低電壓驅動的軟性電子皮膚系統,該系統沒有任何剛性電子組件,可以模擬生物皮膚的感覺反饋功能,包括多模式接收、類似神經的脈沖列信號調節和閉環驅動(圖1C,D)。該系統采用了三層高介電常數(κ)、可伸縮介質的設計,將可伸縮電路的驅動電壓降低到幾伏特,以實現安全高效的在體操作。這一創新有望為截肢患者提供更好的假肢感知和控制能力,推動人機界面技術的發展。
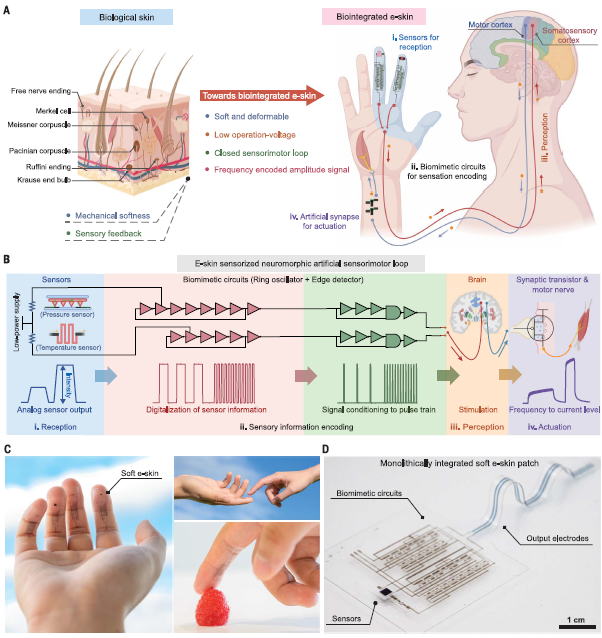
圖1 低電壓驅動的人造軟體電子皮膚系統實現了生物仿生的雙向信號傳輸。
# 低電壓驅動、高性能、可拉伸的有機晶體管
現有的可伸縮有機電子仍需要高工作電壓,有著安全和能耗方面的問題。而降低驅動電壓需要增加柵電容,需要具有高介電常數的薄介電層(圖2Ai)。丁腈-丁二烯橡膠(NBR)是一個很有前途的候選材料,其介電常數高,可以在廣泛的頻率范圍內保持良好的穩定性(圖2B),這一特性對于晶體管和電路的穩定運行至關重要。研究人員開發了一種直接光圖案化方法(最小可達2μm),采用紫外光誘導的疊氮交聯反應。交聯的NBR具有耐溶劑性,然而測試表明晶體管的轉移曲線顯示出大的滯后和低遷移率,這可能是由于高極性丁腈基團引起的半導體-介電界面處能級混亂。這種高κ值和高陷阱密度之間的權衡使得在可伸縮有機器件中實現低驅動電壓和高載流子遷移率頗具挑戰性。
為了克服這個挑戰,研究人員接著開發了一種三層電介質,通過用超薄的非極性聚(苯乙烯-乙烯-丁二烯-苯乙烯)(SEBS)彈性體涂層對高κ 的NBR進行鈍化,隨后使用疏水性的十八烷基三甲氧基硅烷(OTS)進行分子修飾(圖2A)。這種具有適當表面能的介電堆疊在可伸縮半導體層能夠中誘導出理想的納米限制形態,從而實現高載流子遷移率,與單層NBR電介質相比,在三層設計中,載流子遷移率提高了約50倍,同時保持了低驅動電壓(圖2C)。為了量化界面陷阱密度,研究人員測量了各種電介質設計的電荷傳輸的活化能(EA)。NBR-SEBS-OTS與直接旋涂半導體的組合顯示出最低的EA(圖 2D)。在SEBS和OTS層沉積后,擊穿電壓穩定增加,表明針孔減少,這種三層電介質同時實現了低工作電壓和高載流子遷移率(圖2E,F)。
研究人員利用具有良好耐溶劑性和可圖案化性的高κ三層電介質,取得了重要進展,實現了可擴展且無需轉移的低電壓驅動可伸縮晶體管陣列的制造(圖2Aii)。所得到的陣列顯示出可伸縮晶體管的特性,具有低柵漏電流、高遷移率高產率、高可伸縮性等優點(圖2Aiii)。與先前報道的低κ可伸縮電介質相比,高κ三層電介質通過通道寬度歸一化的跨導(Gm/Wch)提高了10倍以上,且實現了與剛性多晶硅晶體管相當亞閾值擺幅(圖2G)。晶體管性能關鍵指標(驅動電壓、亞閾值擺幅、跨導、開關比和泄漏電流)的改進使得我們的軟性晶體管可以以低功率運行,其動態(1.7 pJ)和靜態(0.25 pW)功耗都比現有可伸縮晶體管低100倍左右(圖2H)。
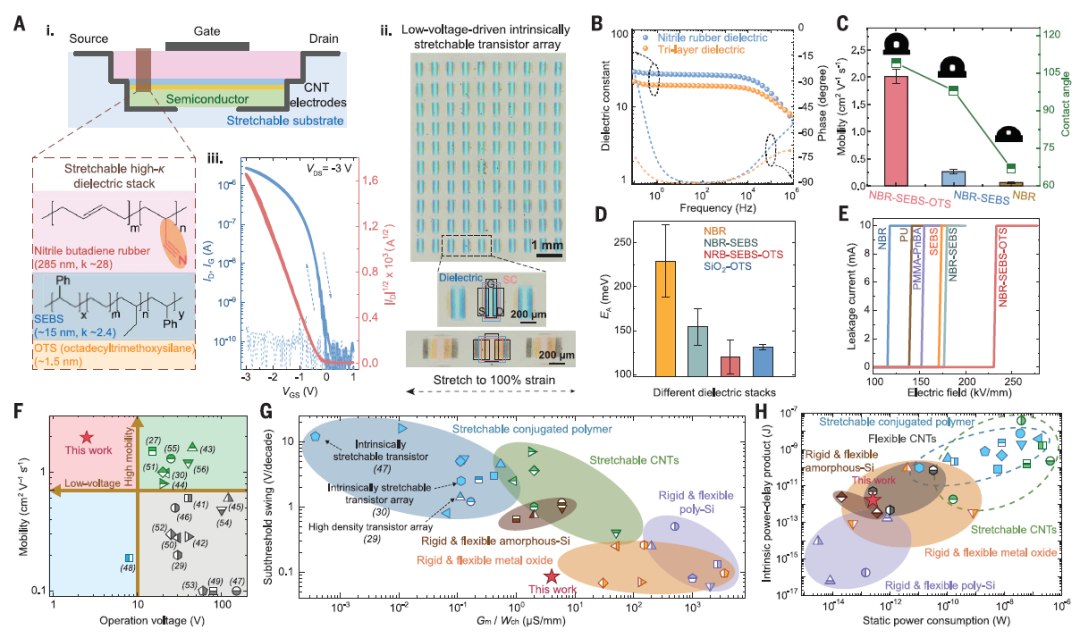
圖2用于高性能和低電壓可拉伸有機晶體管和電路的高κ三層電介質。
#用于產生仿神經脈沖的信號調節電路系統
研究人員通過優化單個晶體管的特性,成功集成了能直接在皮膚上運行的低電壓功能電路,實現了模擬生物皮膚感受器的感覺功能。他們開發了一個電路系統,其中包括傳感器、環形振蕩器(ROs)和邊緣檢測器(EDs),以模擬自然感知過程中刺激信號的轉換和傳輸(圖3A-D)。為了解決頻率調諧的問題,他們引入了一種新的設計,將傳感器放置在感測反相器中,通過調整感測反相器的上拉充電電流,實現了幅度解耦的頻率調制,具有寬動態范圍和穩定的振蕩幅度(圖3E-F)。
隨后,他們制造了多級RO用于區分來自多個傳感器的信息,這對于實現可伸縮的多模態感知能力具有重要意義。為了更好地模仿脈沖列的生物編碼過程,研究人員進一步開發了ED電路來“重塑”RO輸出信號。通過適當設計的延遲網絡和AND門,ED可以有效地捕獲輸入信號以生成穩定的脈沖信號(圖3Gi)。然后,通過延遲網絡、AND門和相應電路制造的最佳幾何設計,他們實現了一種可伸縮的ED,可以生成具有不同頻率的方波輸入的穩定脈沖信號,其持續時間約為4ms,幅度約為5V(圖3G)。
基于以上研究,他們隨之開發了一個單片集成的柔性電子皮膚貼片,其驅動電壓小于±5 V(圖3B,C)。他們還將基于碳納米管的可伸縮壓力傳感器和三維金字塔結構的薄膜溫度傳感器集成到系統中,分別模擬自然機械感受器和溫度感受器(圖3H)。當施加0-50 kPa的壓力或將溫度從22°C升至90°C時,脈沖列信號會生成并更快地響應壓力和溫度刺激水平(圖3I,J)。整個電子皮膚電路由54個可伸縮晶體管組成,實現了可伸縮有機電子的中等規模集成(圖3C,K)。
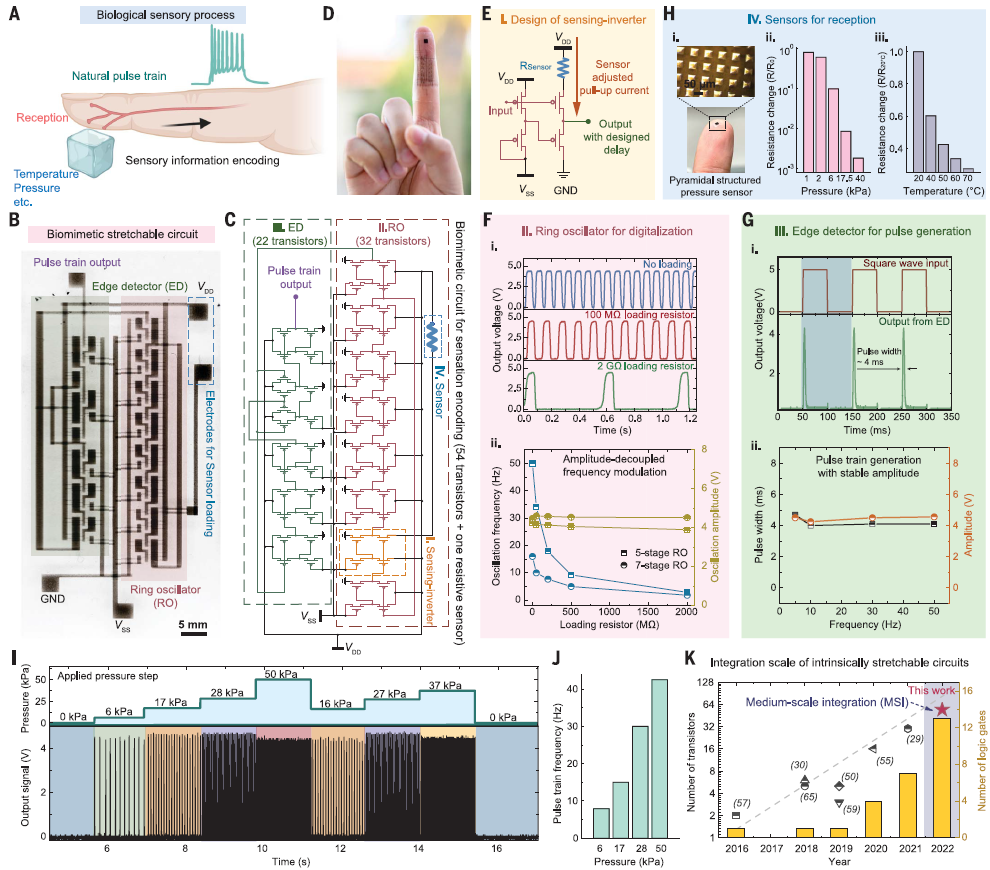
圖3 用于生成仿生脈沖序列的低壓驅動軟電路系統。
# 用于觸發下游執行動作的全固態人工突觸
自然感知反饋環路的一個特點是感知和行動之間的雙向信號通信。研究人員成功開發了能夠實現雙向信號通信的固態離子突觸晶體管,以完成感知和行動之間的傳遞(圖4A,C)。為了解決將頻率編碼的傳感器信息轉換為不同身體動作水平的挑戰,研究人員引入了基于離子門控的突觸晶體管設計,具有類似生物突觸的工作機制(圖4B,D)。通過混合高離子導電性的離子導電彈性體(ICE)和單離子導電的聚電解質(PiTFSI),他們開發了固態離子介質(圖4B),并通過疊氮交聯劑對這種離子介質進行了圖案化處理,制造出了全固態可伸縮的突觸晶體管陣列,具有良好的均勻性(圖4E)。實驗結果顯示,在不同頻率的突觸前脈沖輸入下,突觸后電流幅度發生了顯著變化,即1 Hz和100 Hz輸入之間的輸出差異約為4個數量級,而擴展到800 Hz時輸出差異約為7個數量級(圖4D)。此外,經過長時間在生理液體中浸泡后(8小時),全固態人工突觸的突觸后電流變化較小,而含有小分子離子液體的突觸則喪失了約98.2%的輸出電流(圖4F,G)。
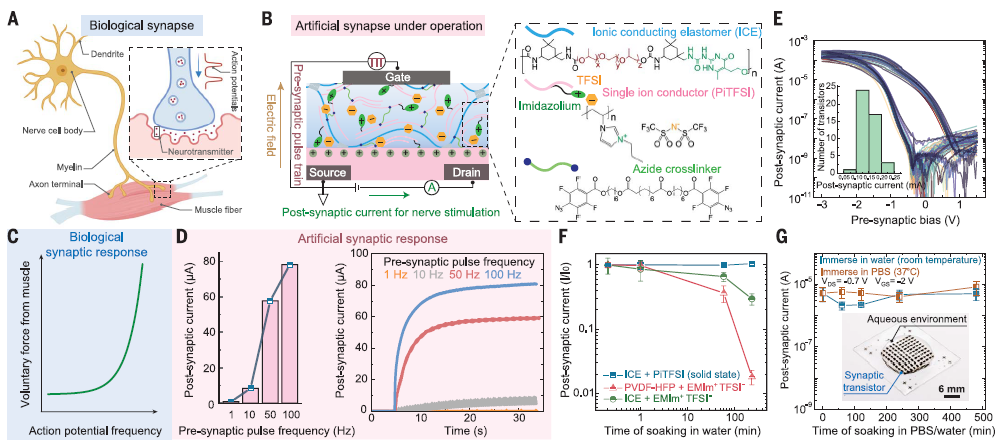
圖4 基于輸入門頻率的全固態軟人工突觸,用于驅動下游身體運動。
# 通過單片柔性電子皮膚演示感知-運動回路
經過在小鼠模型中的測試,全固態人工突觸的皮膚感知-肌肉激活回路在生物學上具有實用性(圖5A-C)。首先,研究人員將柔性電子皮膚與小鼠的體感皮層連接起來以模擬皮膚感知,并期望觸發運動皮層的反饋響應。隨后,通過人工突觸傳遞觸發的運動信號,刺激坐骨神經實現下游肌肉激活,從而完成人工感知-運動回路。
實驗結果表明,當傳感器受到不同大小的力量作用時,體感皮層的數字化輸入能夠成功地在運動皮層引發反應(圖5D,E)。經過進一步放大和信號處理后,利用記錄的觸發信號作為突觸晶體管的門控輸入,觀察到突觸后電流的幅度與施加的壓力成比例。與自然感知反饋過程類似,更強的力量刺激引起雙向電子皮膚系統產生更大的腿部抽搐角度,這與增加的壓力輸入相對應(圖5F,G)。這些結果證明了人工電子皮膚在神經假肢中應用的潛在可行性。此外,該電子皮膚貼片在實驗鼠皮膚上貼附了30小時,未觀察到皮膚刺激性反應。
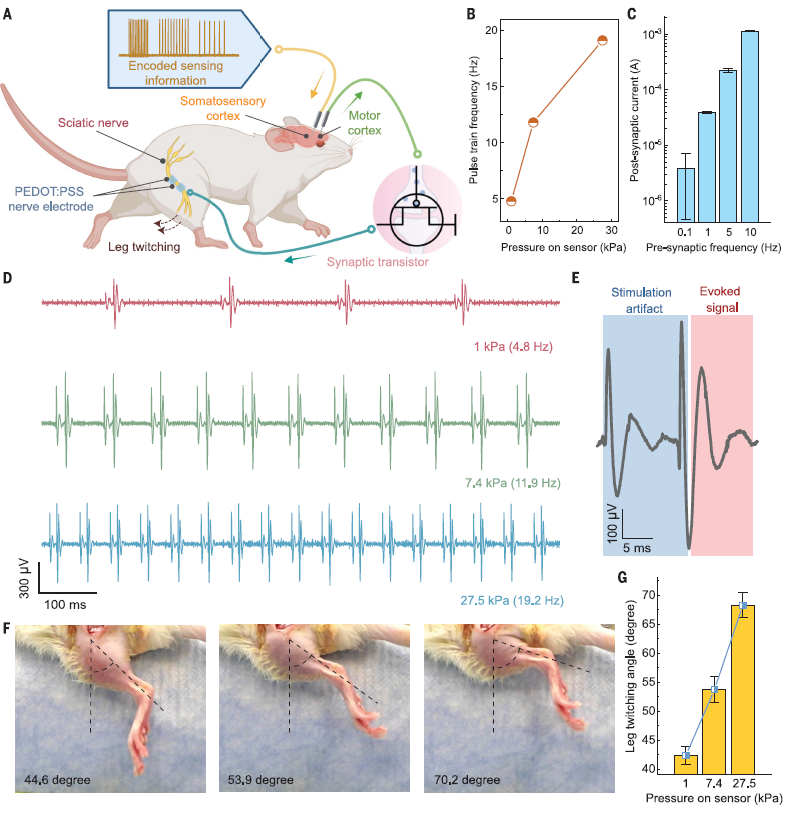
圖5 用于人工感知-肌動循環的低電壓驅動柔性電子皮膚系統。
綜上所述,我們的皮膚為我們的身體提供了一層保護層,但它也能提供詳細的感官反饋和與周圍環境的柔軟互動。研究人員通過合理的材料設計和器件工程,實現了一個單體集成的柔性電子皮膚系統,無需剛性電子組件且具有低驅動電壓、高電路復雜性和仿生感知反饋功能。這種神經形態系統將皮膚的所有所需電學和機械特性結合在一個單一的設備平臺上,這一進展將有助于為發展下一代假肢皮膚、人機界面和神經機器人奠定道路。
審核編輯:劉清
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791346 -
機器人
+關注
關注
213文章
31079瀏覽量
222268 -
晶體管
+關注
關注
78文章
10396瀏覽量
147768 -
柔性電子
+關注
關注
5文章
194瀏覽量
16582 -
驅動電壓
+關注
關注
0文章
100瀏覽量
13961
原文標題:重磅Science:真觸覺!低電壓的柔性電子皮膚體現的神經形態感知-運動回路
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
DRV8830低電壓電機驅動器:特性、應用與設計要點
2026電子皮膚賦能具身智能機器人專題論壇即將召開,共同探索觸覺感知新未來
柔性神經接口與設備是腦機接口的未來嗎?

讓機器感受觸覺:電子皮膚手套,正在重塑“觸摸”的未來?

腦機接口:運動康復與神經康復的創新突破
【「AI芯片:科技探索與AGI愿景」閱讀體驗】+具身智能芯片
【「AI芯片:科技探索與AGI愿景」閱讀體驗】+神經形態計算、類腦芯片
明治科普 | 讓機器人擁有&quot;觸感&quot;:電子皮膚如何實現?

全鏈融合·向新提效|明治傳感CEO出席2025電子裝備論壇,論道柔性智造“感知力”

非侵入性經皮脊髓電刺激(tSCS)的神經機制與脊髓損傷康復臨床應用
革命性神經形態微控制器 ?**Pulsar**? 的深度技術解讀

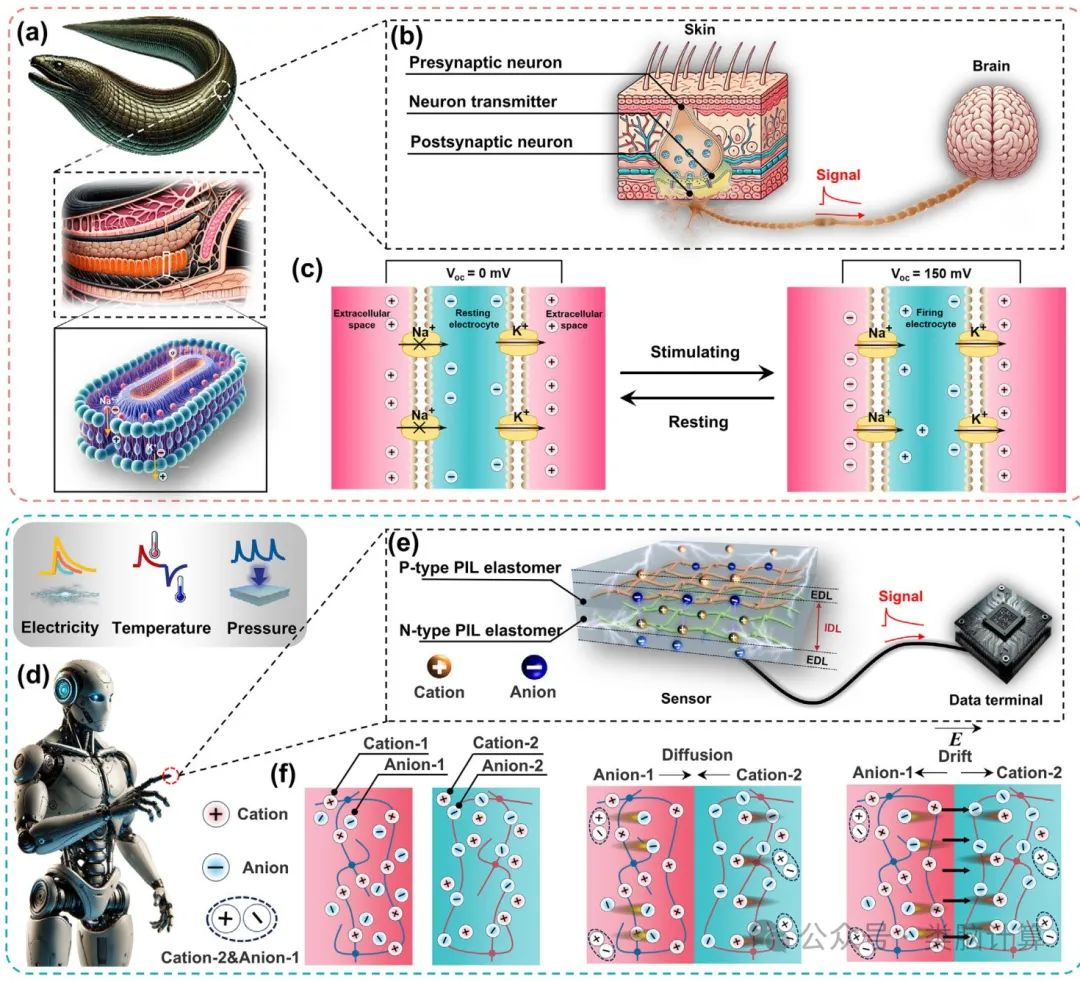
中國科學院:電鰻啟發離子電子人造皮膚,具有多模態感知和傳感器內儲層計算功能
研究基于多功能離子纖維傳感器系統的物體識別和抓取的人工觸覺感知



 工商網監
工商網監
評論