") 三維空間桁架結(jié)構(gòu)在給定支撐和載荷條件下的應(yīng)力、變形分布情況
三維空間桁架結(jié)構(gòu)在給定支撐和載荷條件下的應(yīng)力、變形分布情況

導(dǎo)讀:前不久,與平臺(tái)某講師聊天過程中,獲悉一位仿真優(yōu)質(zhì)內(nèi)容創(chuàng)作者——于老師,工學(xué)博士,博士后,教授,碩士研究生導(dǎo)師,擁有20年的CAE方面的教學(xué)和從業(yè)經(jīng)驗(yàn),長(zhǎng)期堅(jiān)持在網(wǎng)絡(luò)上為本校學(xué)生提供免費(fèi)有限元分析教學(xué)工作,并為他們提供免費(fèi)答疑服務(wù),深受大家的喜愛。
本文根據(jù)某公司提供的圖紙,分析三維空間桁架結(jié)構(gòu)在給定支撐和載荷條件下的應(yīng)力、變形分布情況,以便對(duì)該結(jié)構(gòu)在安裝前是否合理給出意見和建議。結(jié)合公司提供的數(shù)據(jù),為桁架的制作安裝等提供支持。
一、桁架結(jié)構(gòu)的原始數(shù)據(jù)和模型圖
該桁架結(jié)構(gòu)為典型的三維空間結(jié)構(gòu),不僅高度方向有較多層級(jí),寬度方向也有幾個(gè)平面分別支撐,并且每個(gè)平面都根據(jù)需要做了不同的加固。桁架結(jié)構(gòu)的G4立面圖如圖1所示,EL67500、EL58200、EL55600、EL48000四個(gè)平面結(jié)構(gòu)如圖2所示。
該結(jié)構(gòu)在高度方向上共五個(gè)層面,標(biāo)高分別是41600mm、48000mm、55600mm、58200mm、67500mm。在標(biāo)高48000mm到67500 mm之間的K5立面的加固情況如圖3所示,完成的部分三維立體結(jié)構(gòu)圖如圖6所示,
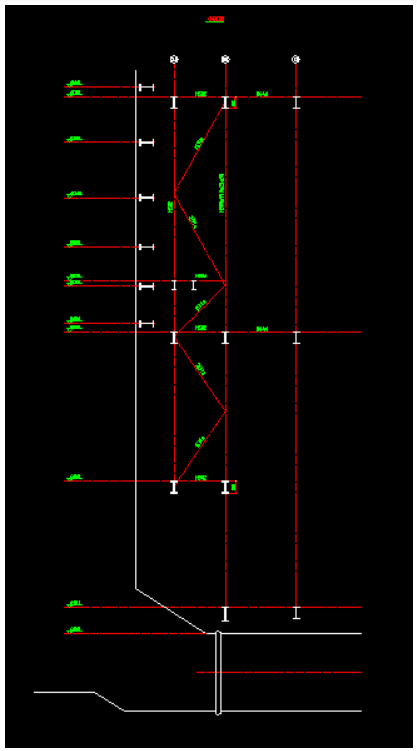
圖1 G4立面圖
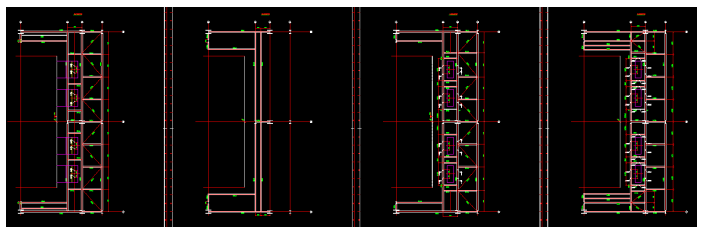
圖2 EL67500、EL58200、EL55600、EL48000四個(gè)平面圖
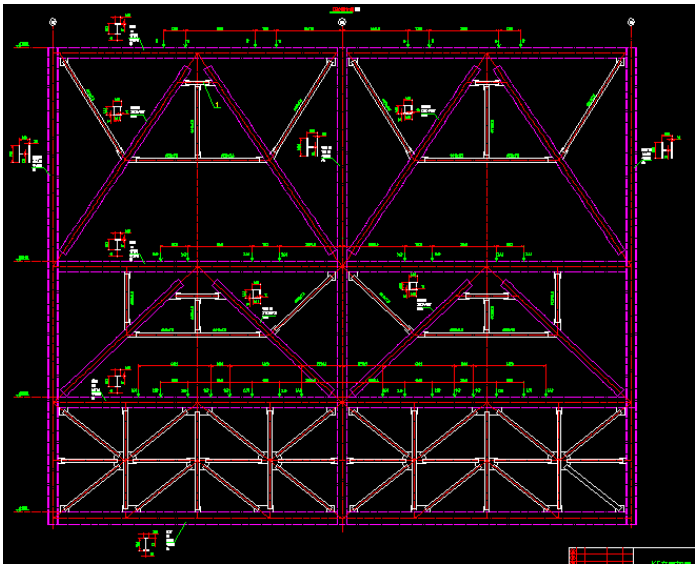
圖3 K5立面加固圖
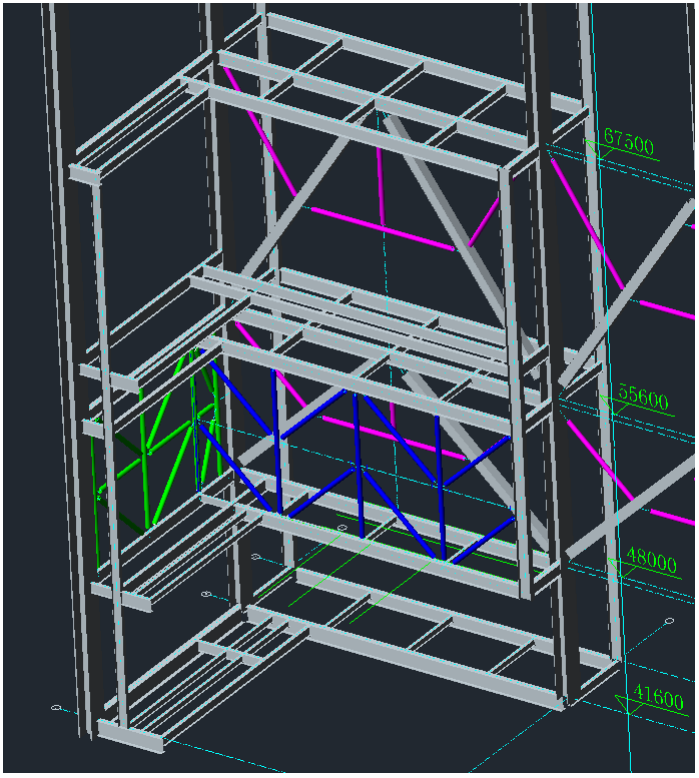
圖6 桁架部分結(jié)構(gòu)三維立體圖
二、桁架結(jié)構(gòu)有限元線體模型的構(gòu)建
本次分析的桁架結(jié)構(gòu)為五層級(jí)的立體結(jié)構(gòu)形式,涉及到的型鋼類型較多。考慮到立體結(jié)構(gòu)模型的分析較為復(fù)雜,故整個(gè)模型都在有限元軟件里建立,這樣避免了模型導(dǎo)入時(shí)帶來的點(diǎn)與點(diǎn)的連接可能出現(xiàn)錯(cuò)誤的問題。建模時(shí)通過線體建模的方式,按照公司提供的CAD圖紙的結(jié)構(gòu)尺寸進(jìn)行建模,并根據(jù)實(shí)際情況對(duì)每個(gè)線體賦予不同的型鋼截面。建模完成的桁架三維線體結(jié)構(gòu)如圖7所示。
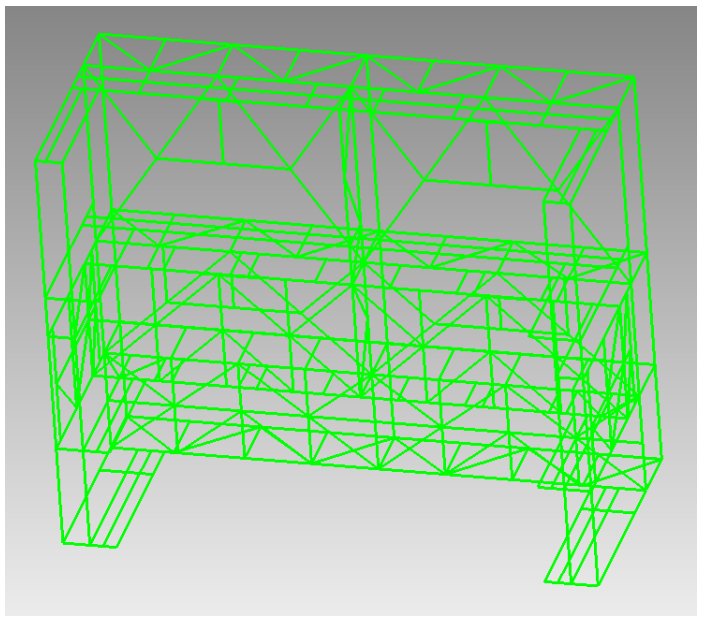 圖7 桁架三維線體結(jié)構(gòu)模型
圖7 桁架三維線體結(jié)構(gòu)模型
三、桁架所用型鋼的截面尺寸
桁架結(jié)構(gòu)中采用了多種型鋼,包含了H型鋼,槽鋼等,具體的型材的截面結(jié)構(gòu)和尺寸等如圖8所示。
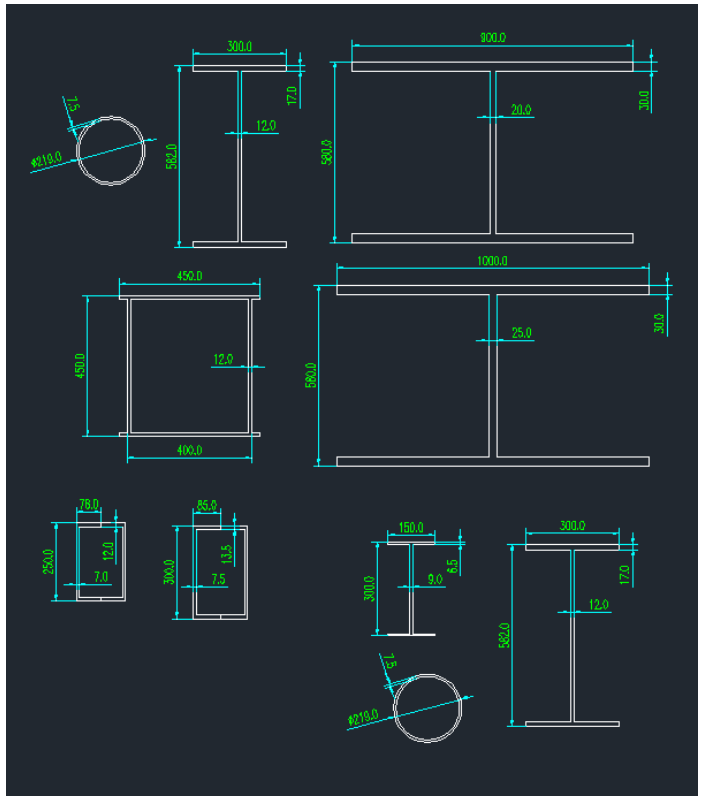
圖8 型材的截面結(jié)構(gòu)尺寸
查機(jī)械設(shè)計(jì)手冊(cè),按機(jī)械設(shè)計(jì)手冊(cè)數(shù)據(jù)進(jìn)行截面繪制并按上述要求賦給相應(yīng)的線體,賦予截面后的三維結(jié)構(gòu)如圖9所示。對(duì)結(jié)構(gòu)進(jìn)行網(wǎng)格劃分。劃分網(wǎng)格后的有限元模型如圖10所示。
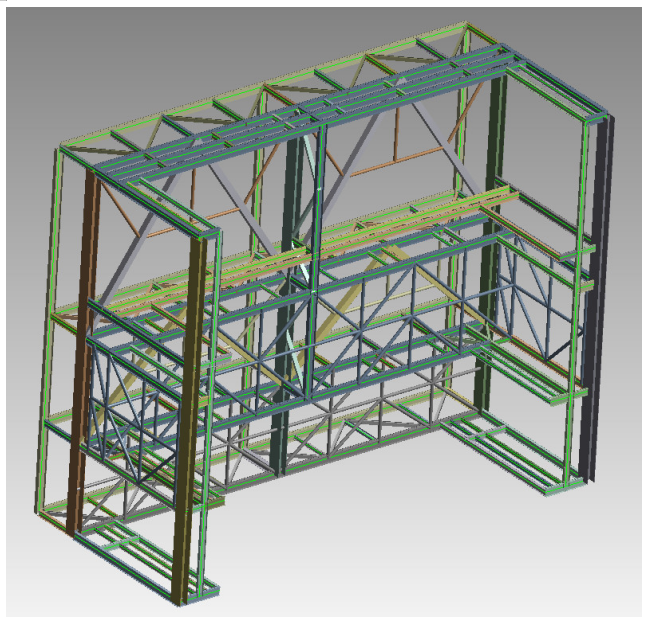
圖9賦予截面后的桁架的三維結(jié)構(gòu)圖
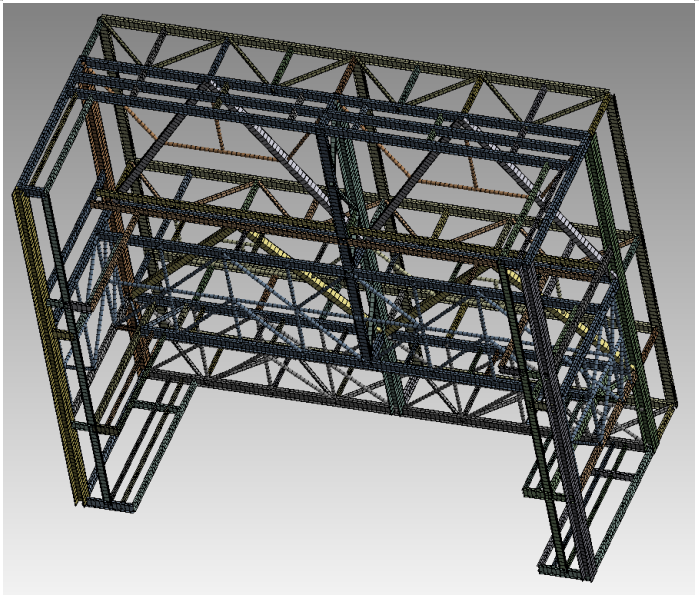
圖10桁架有限元網(wǎng)格劃分結(jié)果
四、桁架的載荷及約束
公司提供的載荷、約束等數(shù)據(jù)如下:
約束條件:該結(jié)構(gòu)的頂面和底面與所有主立柱相連點(diǎn)處施加固定約束。
施加載荷:標(biāo)高48000層有16個(gè)2.5t的支點(diǎn)載荷與16個(gè)1.4t的吊點(diǎn)載荷,故施加16個(gè)25000N、16個(gè)14000N(重力加速度取10m/s2)的集中力。
(1)標(biāo)高55600層有16個(gè)3.4t支點(diǎn)載荷,施加16個(gè)34000N(重力加速度取10m/s2)的集中力。
(2)標(biāo)高67500層有16個(gè)1t支點(diǎn)載荷與8個(gè)2t吊點(diǎn)載荷,故施加16個(gè)10000N、8個(gè)20000N(重力加速度取10m/s2)的集中力。
(3) 給整個(gè)結(jié)構(gòu)施加重力加速度(考慮桁架本身的自重)。
具體約束和加載情況如圖11所示。
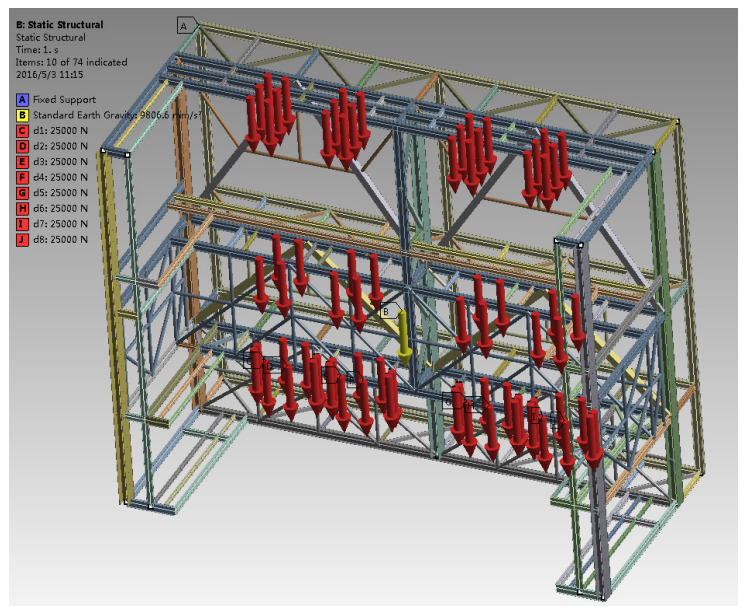
圖11桁架約束及加載情況
六、有限元分析結(jié)果及說明
1、桁架最大組合應(yīng)力分析
經(jīng)過分析計(jì)算,得出桁架的最大組合應(yīng)力云圖如圖12所示。
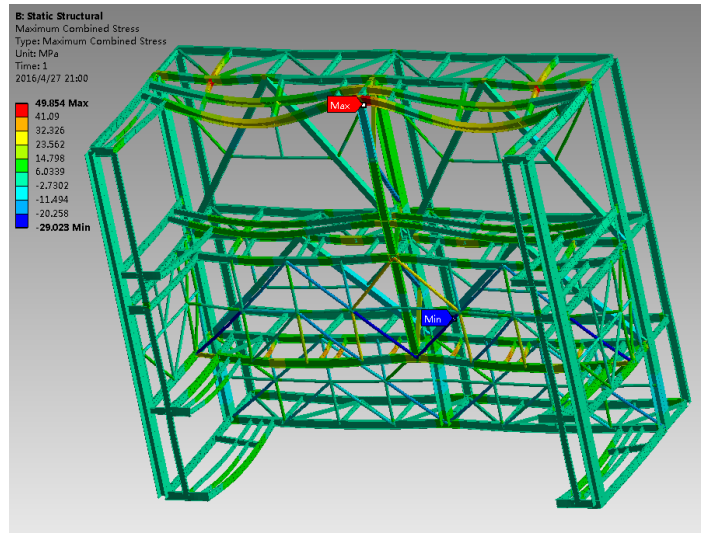
圖12 桁架最大組合應(yīng)力云圖
由該應(yīng)力云圖可以看出,該桁架在設(shè)定約束和載荷下的最大組合拉應(yīng)力值為49.854MPa,產(chǎn)生在桁架頂部中央位置靠前處(如圖12所標(biāo)Max處),最小組合壓應(yīng)力產(chǎn)生在中間靠下處的某一根(如圖12所標(biāo)Min處),為29.023 MPa,桁架所受的應(yīng)力均在材料的允許范圍之內(nèi),而材料的屈服極限為235MPa,安全系數(shù)為235/49.854=4.7137。這里所說的最小組合應(yīng)力,并不是數(shù)值最小,而是從方向上來討論,與前述組合應(yīng)力方向相反,但數(shù)值并最不是最小的。
2、桁架變形分析
桁架產(chǎn)生的變形云圖如圖13所示。
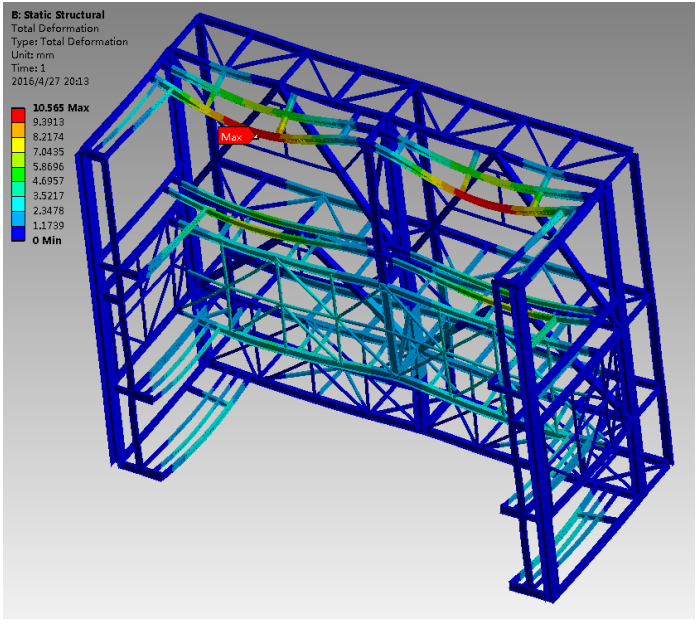
圖13 桁架總變形云圖
由圖13變形云圖可以看出,整體桁架受力后產(chǎn)生的變形符合預(yù)期的設(shè)想,桁架的變形關(guān)于中心面對(duì)稱。載荷主要位于標(biāo)高48000、55600、67500的梁上,故這些位置產(chǎn)生了較大變形。最大變形發(fā)生在標(biāo)高67500層與K4.5立面的交叉處的梁,最大變形值10.565mm。原因是此處受到了較大的載荷,并且在該層下面支撐也較少,但該變形值總的來說也不大。考慮到鋼梁中心面左側(cè)變形最大的梁的長(zhǎng)度為16.12m,根據(jù)《鋼結(jié)構(gòu)設(shè)計(jì)規(guī)范》3.5.1條所指向的附錄A,最大變形可以在L/400=40.3mm之內(nèi)。故該變形值在允許范圍之內(nèi)。
為了便于觀察,特分析得出X,Y,Z三個(gè)方向的變形云圖(分別代表正視、側(cè)視、俯視),其變形情況如圖14-16所示。
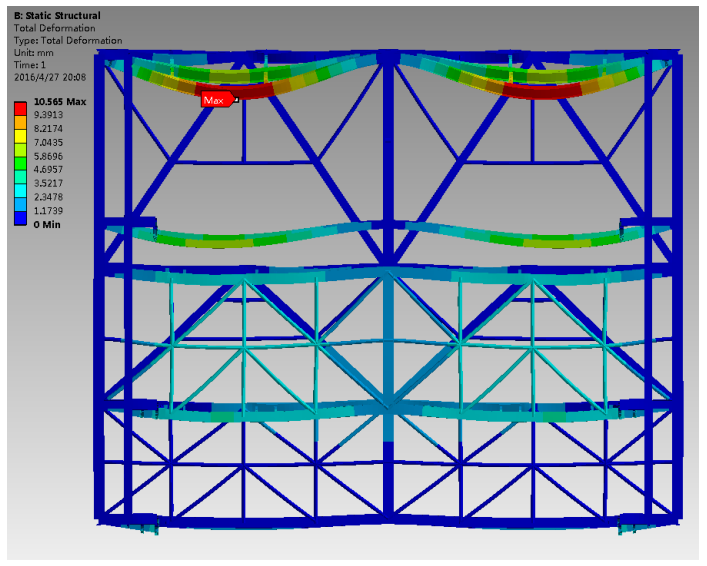
圖14 桁架垂直X方向總變形云圖
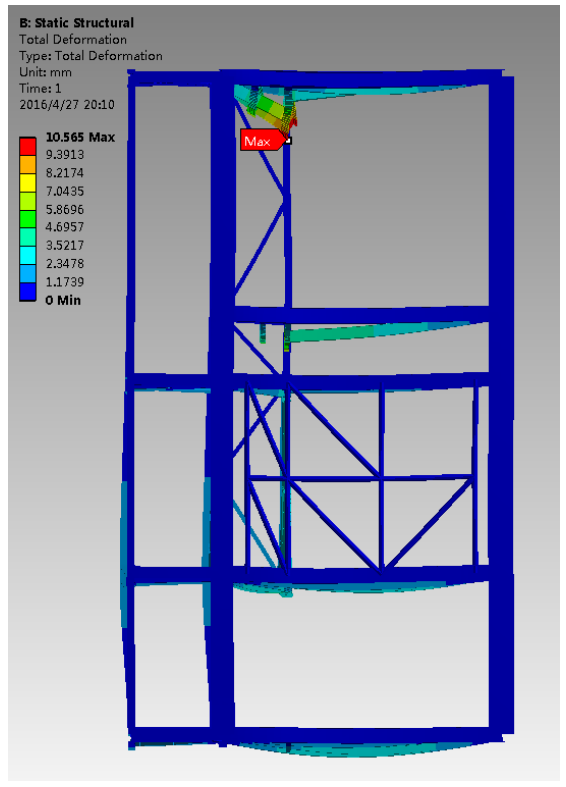
圖15 桁架垂直Z方向總變形云圖
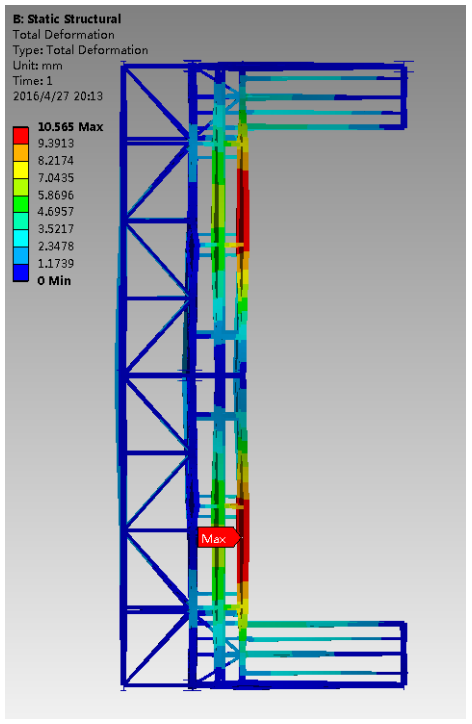
圖16 桁架垂直Y方向總變形云圖
3、桁架各桿的軸向力分析
圖17為三維桁架各桿所受的軸向力云圖。
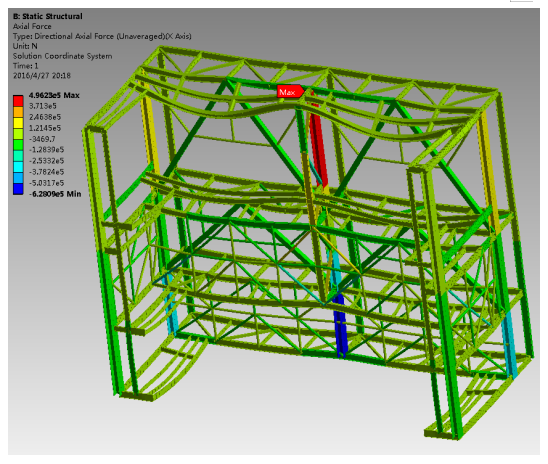
圖17 桁架軸向力云圖
由圖17桁架軸向力云圖可以得出,標(biāo)高58200以下的主立柱表現(xiàn)為受壓狀態(tài),以上的表現(xiàn)為受拉狀態(tài)。這是由于最前面的K4.5。
七、從零開始學(xué)Mechanical入門15講
以上是筆者關(guān)于《五個(gè)層級(jí)的三維空間結(jié)構(gòu)桁架有限元分析》,它將收錄在我的精品課《從零開始教學(xué)Mechanical入門15講》-持續(xù)加餐內(nèi)容。手把手教-材料庫(kù)、幾何建模、網(wǎng)格劃分、結(jié)構(gòu)后處理,從零開始學(xué)-ANSYS Mechanical入門15講,讓你輕松自學(xué)-靜力學(xué)分析、模態(tài)計(jì)算、穩(wěn)態(tài)熱和動(dòng)力學(xué)分析。初步掌握ANSYS Mechanical 在機(jī)械、建筑等領(lǐng)域的應(yīng)用及操作步驟,可以完成結(jié)構(gòu)靜力學(xué)、運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)分析;結(jié)構(gòu)疲勞分析、熱分析等。
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7335瀏覽量
94754 -
模型
+關(guān)注
關(guān)注
1文章
3751瀏覽量
52099 -
三維空間
+關(guān)注
關(guān)注
0文章
19瀏覽量
7857
原文標(biāo)題:于老師:手把手教你五個(gè)層級(jí)的三維空間結(jié)構(gòu)桁架有限元分析
文章出處:【微信號(hào):sim_ol,微信公眾號(hào):模擬在線】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
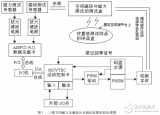
基于多傳感器數(shù)據(jù)融合處理實(shí)現(xiàn)與城市三維空間和時(shí)間配準(zhǔn)

labview 利用三維空間畫了一個(gè)球,然后想在球面上畫幾個(gè)點(diǎn)
請(qǐng)問ADXL345配合陀螺儀能精確測(cè)量短時(shí)三維空間運(yùn)動(dòng)路徑嗎?
基于麥克風(fēng)陣列模擬人耳進(jìn)行三維空間的聲源定位
三維空間中每一平面有四個(gè)點(diǎn),能根據(jù)這四個(gè)點(diǎn)畫出一個(gè)圓來嗎 ?
三維變形及應(yīng)力測(cè)量方案
基于伺服控制的三維空間磁場(chǎng)與磁力測(cè)試系統(tǒng)
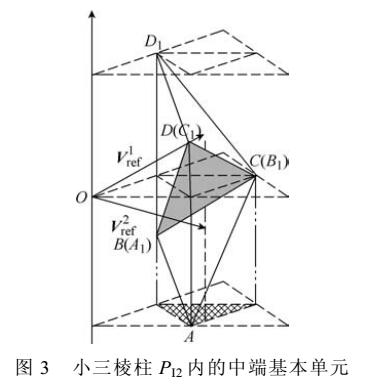
非正交三維坐標(biāo)系下多電平空間矢量調(diào)制策略
高精度三維空間定位之單目空間定位技術(shù)解析
適用于戶外環(huán)境的三維空間橢圓信道模型
立體倉(cāng)庫(kù)三維空間路徑優(yōu)化方案的介紹
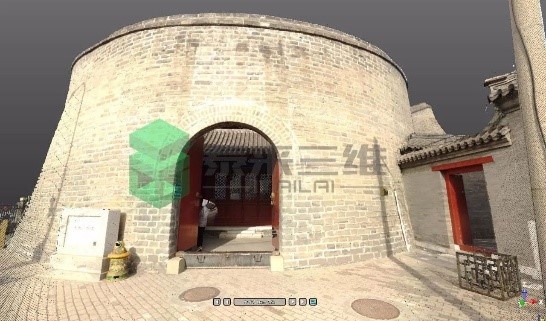
泰來三維| 三維掃描在古建筑變形監(jiān)測(cè)方面應(yīng)用
一種基于基礎(chǔ)模型對(duì)齊的自監(jiān)督三維空間理解方法



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論