") KUKA機(jī)器人高級編程中的"CHANNEL"的應(yīng)用
KUKA機(jī)器人高級編程中的"CHANNEL"的應(yīng)用

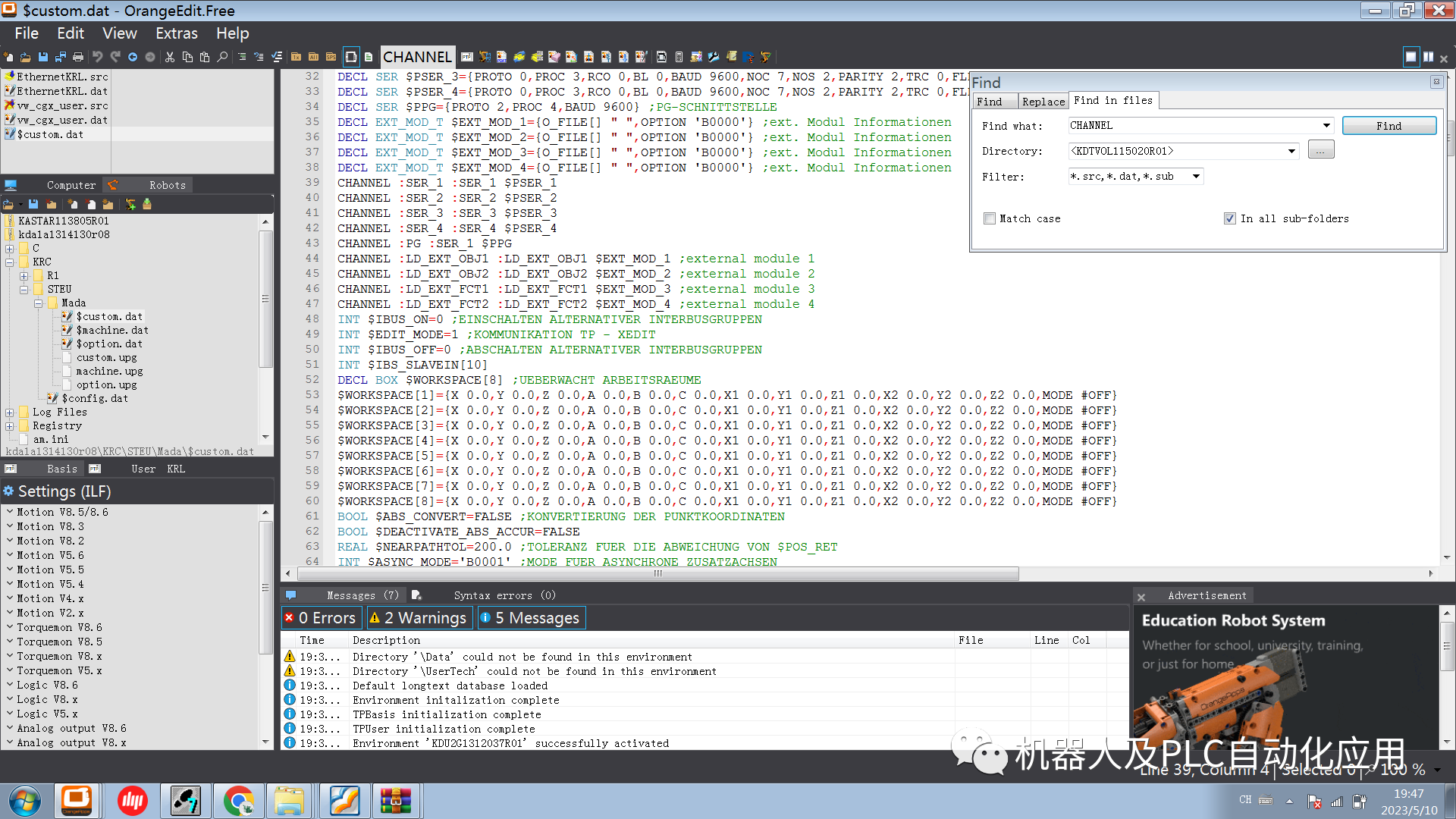
“CHANNEL”語句被用于聲明輸入和輸出的信號名。
不需要對CHANNEL語句進(jìn)行編程。它已經(jīng)為文件$CUSTOM.DAT中的所有外部模塊預(yù)定義。不過,為了便于理解,這里對該語句進(jìn)行了解釋。

機(jī)器人控制器包含兩類界面:
所有界面用符號名表示地址。特殊的界面名( 符號名)是預(yù)先用CHANNEL 聲明的信號的變量通道符合邏輯的組合。
預(yù)先確定的信號變量通道,SER_1 和 SER_2 為了連續(xù)界面,和$CMD(例如:“RUN....”)
為了解釋程序命令。
訪問通道的過程是一樣的。為了可以在命令中能訪問通道,通道名必須在“CHANNEL ”中被公告。
在文件 “$CUSTOM.DAT ”( 目錄“....PROGRAM FILESKRCMADASTEU”) “:SER_1”和“:SER_2 ”中,變量是預(yù)先確定的。
.通道可以通過“COPEN”語句打開。 “CREAD”語句能用于讀通道, “CWRITE” 語句用于寫通道。
用“CCLOSE”語句關(guān)閉通道。
通道語句的規(guī)定和命令的信息是相同的。
狀態(tài)信息是預(yù)先確定的結(jié)構(gòu)類型“STATE_T”的變量的反饋。
如果要尋址外部模塊,這是必要的,因為預(yù)定義的結(jié)構(gòu)變量無法直接尋址。例如,外部模塊LD_EXT_OBJ1不能通過$EXT_MOD_1直接尋址。
CHANNEL :Channel name :Interface name Structure variable
“STATE_T”有下列的定義:
STRUC STATE_T CMD_STAT R ET1, INT HITS, INT LENGTH
“CMD_STAT”是被下面預(yù)先確定的舉例類型的數(shù)據(jù):
ENUMCMD_STATCMD_OK,CMD_TIMEOUT ,DATA_OK ,DATA_BLK,DATA_END,CMD_ABORT,CMD_REJ ,CMD_PART,CMD_SYN ,F(xiàn)MT_ERR
這個命令可使用“CREAD”和“CWRITE”語句產(chǎn)生的可能用到預(yù)先確定的列舉類型:ENUMMODUS_TSYNC ,ASYNC,ABS ,COND ,SEQ
在單獨的命令中解釋規(guī)定和命令的意義。只有參數(shù)被使用時才被列出。
例子
外部模塊1的CHANNEL語句:
CHANNEL :LD_EXT_OBJ1 :LD_EXT_OBJ1 $EXT_MOD_1
使用“CHANNEL”語句分配實際通道的通道名:
Channel name: SER_2
被分配到
physical channel: SER_2
在“$CUSTOM.DAT ”文件中預(yù)先確定的
( 地址....PROGRAMFILESKRCMADASTEU)
CHANNELSER_2 $PSER_2
不需要對CHANNEL語句進(jìn)行編程。它已經(jīng)為文件$CUSTOM.DAT中的所有外部模塊預(yù)定義。不過,為了便于理解,這里對該語句進(jìn)行了解釋。
機(jī)器人控制器包含兩類界面:
- 簡單程序界面-- signals
- 邏輯界面-- channels .
預(yù)先確定的信號變量通道,SER_1 和 SER_2 為了連續(xù)界面,和$CMD(例如:“RUN....”)
為了解釋程序命令。
訪問通道的過程是一樣的。為了可以在命令中能訪問通道,通道名必須在“CHANNEL ”中被公告。
在文件 “$CUSTOM.DAT ”( 目錄“....PROGRAM FILESKRCMADASTEU”) “:SER_1”和“:SER_2 ”中,變量是預(yù)先確定的。
.通道可以通過“COPEN”語句打開。 “CREAD”語句能用于讀通道, “CWRITE” 語句用于寫通道。
用“CCLOSE”語句關(guān)閉通道。
通道語句的規(guī)定和命令的信息是相同的。
狀態(tài)信息是預(yù)先確定的結(jié)構(gòu)類型“STATE_T”的變量的反饋。
如果要尋址外部模塊,這是必要的,因為預(yù)定義的結(jié)構(gòu)變量無法直接尋址。例如,外部模塊LD_EXT_OBJ1不能通過$EXT_MOD_1直接尋址。
CHANNEL :Channel name :Interface name Structure variable
| Channelname | 任何符號名。 |
| Interfacename | 預(yù)先確定的信號變量SER_1 連續(xù)界面1SER_2 連續(xù)界面2 |
| Structurevariable | 系統(tǒng)決定結(jié)構(gòu)變量。賦值不能輸出。. |
“STATE_T”有下列的定義:
STRUC STATE_T CMD_STAT R ET1, INT HITS, INT LENGTH
“CMD_STAT”是被下面預(yù)先確定的舉例類型的數(shù)據(jù):
ENUMCMD_STATCMD_OK,CMD_TIMEOUT ,DATA_OK ,DATA_BLK,DATA_END,CMD_ABORT,CMD_REJ ,CMD_PART,CMD_SYN ,F(xiàn)MT_ERR
這個命令可使用“CREAD”和“CWRITE”語句產(chǎn)生的可能用到預(yù)先確定的列舉類型:ENUMMODUS_TSYNC ,ASYNC,ABS ,COND ,SEQ
在單獨的命令中解釋規(guī)定和命令的意義。只有參數(shù)被使用時才被列出。
例子
外部模塊1的CHANNEL語句:
CHANNEL :LD_EXT_OBJ1 :LD_EXT_OBJ1 $EXT_MOD_1
使用“CHANNEL”語句分配實際通道的通道名:
Channel name: SER_2
被分配到
physical channel: SER_2
在“$CUSTOM.DAT ”文件中預(yù)先確定的
( 地址....PROGRAMFILESKRCMADASTEU)
CHANNELSER_2 $PSER_2
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
控制器
+關(guān)注
關(guān)注
114文章
17829瀏覽量
194537 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31227瀏覽量
223064 -
Channel
+關(guān)注
關(guān)注
0文章
32瀏覽量
12440
原文標(biāo)題:KUKA機(jī)器人高級編程中的"CHANNEL"的應(yīng)用
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
KUKA重型機(jī)器人
這個是KUKA重型機(jī)器人處理和測量混凝土軌枕的視頻。處理得相當(dāng)精細(xì)。真心值得愛好機(jī)器者和愛國者研究研究。
發(fā)表于 02-03 15:18
"可編程機(jī)器人套件免費試用"活動參與者學(xué)習(xí)記錄匯總貼
`2015元旦剛過。我們舉辦了一個線上活動"愛上DIY——可編程機(jī)器人套件免費試用&
發(fā)表于 03-03 11:38
KUKA機(jī)器人伺服驅(qū)動模塊維修
KUKA庫卡C4機(jī)器人驅(qū)動器故障報警維修庫卡機(jī)器人維修內(nèi)容包括庫卡機(jī)器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡
發(fā)表于 09-17 07:09
教你如何搭建淺層神經(jīng)網(wǎng)絡(luò)"Hello world"
作為圖像識別與機(jī)器視覺界的 "hello world!" ,MNIST ("Modified National Institute of Standard
"STM32F0 Error: Flash Download failed - ""Cortex-M0""解決"
開發(fā)工具CUbemx + Keil uVision5(MDK V5)錯誤現(xiàn)象在STM32F0燒錄程序是出現(xiàn)了Error: Flash Download failed - &quot
發(fā)表于 12-01 12:06
?34次下載

芯片工藝的&quot;7nm&quot; 、&quot;5nm&quot;到底指什么?
近幾年,芯片產(chǎn)業(yè)越來越火熱,一些行業(yè)內(nèi)的術(shù)語大家也聽得比較多了。那么工藝節(jié)點、制程是什么,"7nm" 、"5nm"又是指什么?
&quot;科技春晚&quot;2024 CES圓滿落幕 開普勒人形機(jī)器人&quot;首秀&quot;廣獲好評
了全球逾4000家的廠商參展,其中來自中國的企業(yè)超過1100家,占比超過參展商總量的四分之一。 開普勒人形機(jī)器人展位 在本屆CES中,上海開普勒探索機(jī)器人有限公司(以下簡稱"開普勒")首度攜先行者系列通用人形

科沃斯掃地機(jī)器人通過TüV萊茵&quot;防纏繞&quot;和&quot;高效邊角清潔&quot;認(rèn)證
3月15日,在2024中國家電及消費電子博覽會(AWE)上,國際獨立第三方檢測、檢驗和認(rèn)證機(jī)構(gòu)德國萊茵TüV大中華區(qū)(簡稱"TüV萊茵")為科沃斯兩款掃地機(jī)器人(型
電纜局部放電在線監(jiān)測:守護(hù)電網(wǎng)安全的&amp;quot;黑科技&amp;quot;
運行的命脈。而在這場與時間的賽跑中,電纜局部放電在線監(jiān)測技術(shù)正扮演著"安全衛(wèi)士"的角色,用科技力量將隱患扼殺于萌芽狀態(tài)。一、看不見的"定時炸彈&
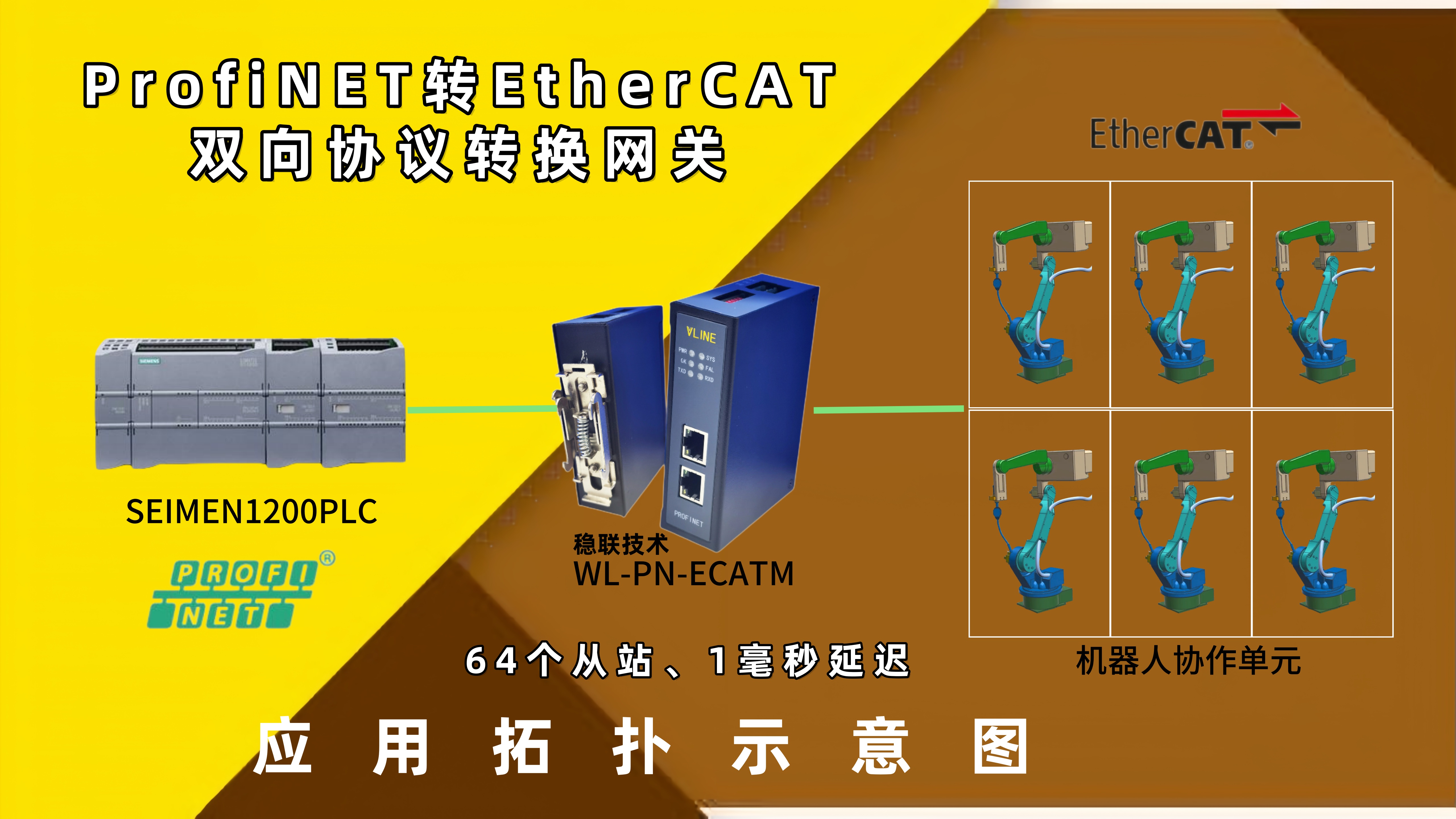
機(jī)器人手臂&quot;聽不懂&quot;指令?EtherCAT轉(zhuǎn)PROFINET網(wǎng)關(guān)妙解產(chǎn)線通信僵局
的機(jī)器人協(xié)作單元應(yīng)用案例
某高端精密制造企業(yè)在自動化加工生產(chǎn)線中,需要將KUKA iiWA協(xié)作機(jī)器人(支持EtherCAT)無縫集成到以西門子840D CNC(Profinet主站)
人形機(jī)器人為什么要定制? ——揭秘工業(yè)場景的&quot;千面需求&quot;
核心洞察:標(biāo)準(zhǔn)化機(jī)器人難以破解工業(yè)場景的"需求碎片化"困局。富唯智能通過?"五大模塊柔性架構(gòu)+零代碼中樞"
機(jī)械臂越復(fù)雜越&amp;quot;卡頓&amp;quot;?別讓控制器拖了后腿
時不可兼得的行業(yè)難題。行業(yè)背景2025年被業(yè)界稱為"人形機(jī)器人量產(chǎn)元年"。國際機(jī)器人聯(lián)合會(IFR)最新報告顯示,2024年中

從&amp;quot;替代人力&amp;quot;到&amp;quot;智能協(xié)同&amp;quot;:履帶式巡檢機(jī)器人的產(chǎn)業(yè)躍遷
2026年的工業(yè)智能化轉(zhuǎn)型浪潮中,一個顯著的趨勢正在形成——工業(yè)巡檢機(jī)器人正從單純的"人力替代工具"升級為具備感知、決策與協(xié)同能力的&
科義機(jī)器人:讓工業(yè)巡檢從&quot;人海戰(zhàn)術(shù)&quot;轉(zhuǎn)向&quot;智能時代&quot;
科義機(jī)器人:讓工業(yè)巡檢從"人海戰(zhàn)術(shù)"轉(zhuǎn)向"智能時代" 在冶金、化工、電力等高危行業(yè),每一次巡檢都是與風(fēng)險的博弈。高溫、有毒、易燃易爆的環(huán)境下,傳統(tǒng)人工巡檢不僅效率受限,更時刻威脅著一線作業(yè)人員



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論