 機器人導航技術:SLAM創新點前世今生分析
機器人導航技術:SLAM創新點前世今生分析

將一個機器人放入未知環境中的未知位置,是否有辦法讓機器人一邊逐步描繪出此環境完全的地圖,同時一邊決定機器人應該往哪個方向行進?

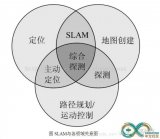
SLAM(simultaneous localization and mapping)全稱即時定位與地圖構建或并發建圖與定位,它主要的作用就是讓機器人在未知的環境中,完成定位(Localization),建圖(Mapping)和路徑規劃(Navigation)。由于其重要的理論與應用價值,被很多學者認為是實現真正全自主移動機器人的關鍵。目前,SLAM技術被廣泛運用于機器人、無人機、無人駕駛、AR、VR等領域。
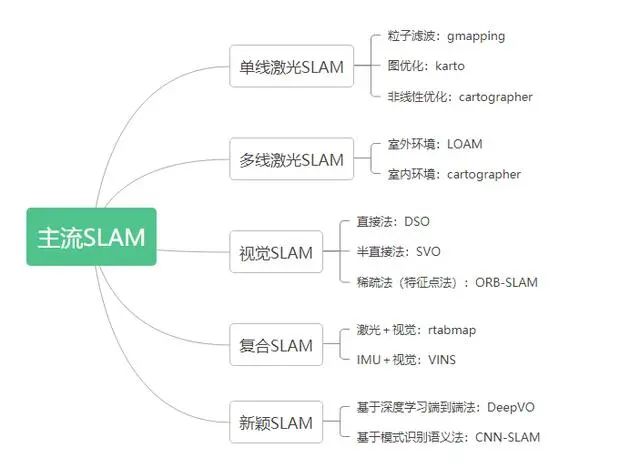
主流的slam技術應用有兩種,分別是激光slam(基于激光雷達lidar來建圖導航)和視覺slam(vslam,基于單/雙目攝像頭視覺建圖導航)。
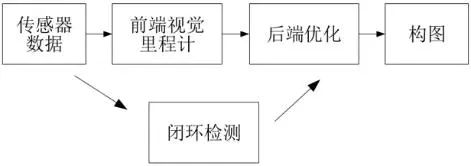
經典的SLAM系統一般包含前端視覺里程計、后端優化、閉環檢測和構圖四個主要部分。
很多同學都覺得Slam方向難以入門,也難以學深。但其實相對來講,不像其他很多方向,很多的東西大家都已經做了,并且做的很不錯,要想發論文或者找創意突破比較吃力。slam方向還有很多深層次的多領域結合應用的內容還比較少,并且slam更深的內容還有很多東西需要做。
3月21日,在機器人slam、無線感知、多模態融合、智能視覺領域有深厚落地經驗的Wills老師,將系統性為大家講解機器人導航相關技術,并帶大家分析slam創新點的前世今生。
作為大廠技術顧問,Wills老師在機器人slam領域已經頗有建樹,同時作為SCI國際會議、期刊審稿人,Wills老師在論文創新點挖掘方面也經驗豐富。
審核編輯 :李倩
-
機器人
+關注
關注
213文章
31079瀏覽量
222282 -
激光
+關注
關注
21文章
3658瀏覽量
69633 -
SLAM
+關注
關注
24文章
457瀏覽量
33331
原文標題:機器人導航技術:SLAM創新點前世今生分析
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
激光導航AGV底盤定制 巡檢機器人,服務機器人,智慧物流搬運AGV
機器人想要實現智能移動,必須具備超強的自主定位導航能力
SLAM不等于機器人自主定位導航
SLAM技術的應用及發展現狀
讓機器人完美建圖的SLAM 3.0到底是何方神圣?
【Toybrick RK3399Pro AI開發板試用申請】機器人激光與視覺融合的導航模塊
SLAM技術目前主要應用在哪些領域
淺析基于SLAM的機器人自主定位導航



 工商網監
工商網監
評論