") 基于ROS的機器人建圖與導(dǎo)航仿真全過程
基于ROS的機器人建圖與導(dǎo)航仿真全過程

引言
之前一直想寫一篇關(guān)于ROS機器人建圖與導(dǎo)航仿真全過程的教程,終于有時間來做這個事啦,本人也拿過吉林省高校機器人大賽—ROS競速組的冠軍,第十六屆全國智能車比賽—訊飛餐廳組線上賽二等獎,我想這個教程對接下來的一些參賽者多多少少也會有一些貢獻(xiàn)。
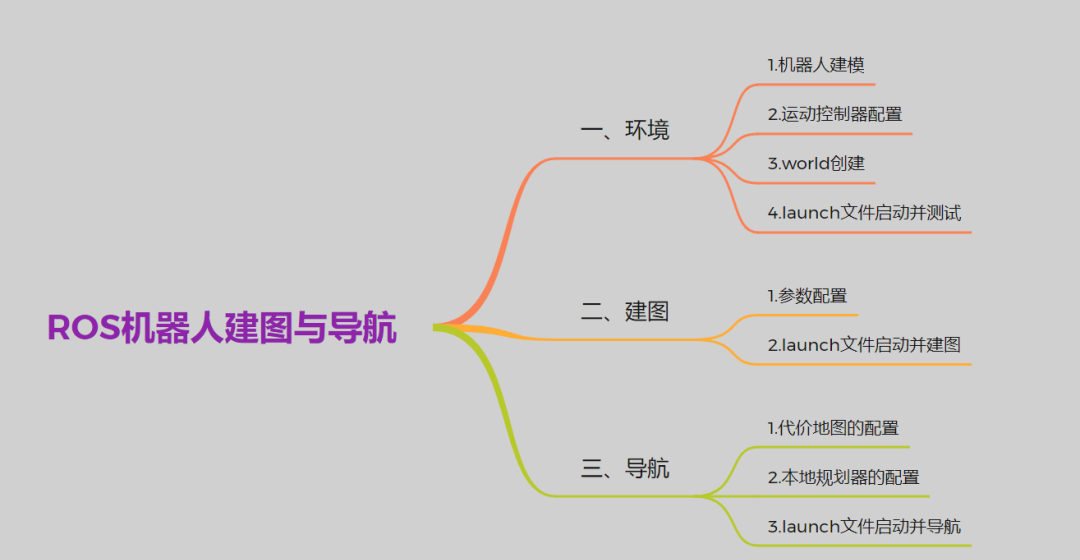
當(dāng)然我覺得你已經(jīng)會ROS的一些基本操作了,本文章只是簡單扼要的介紹這個過程,其中細(xì)節(jié)部分難免可能不會太詳細(xì)還請見諒,當(dāng)人后續(xù)也會有更多這方面的文章,也會傳授一些ROS機器人建圖與導(dǎo)航方面的經(jīng)驗,當(dāng)然我也在學(xué)習(xí)的過程,難免一些不足之處,話不多說啦,讓我先把這個全過程的思維導(dǎo)圖放在下面。
文章所用的代碼已經(jīng)開源:https://gitee.com/xiaolong_ROS/Map_construction-Navigation_simulation.git
一、環(huán)境
1.機器人建模
我個人習(xí)慣把機器人本體放在單獨的一個package下,讓我們先看看里面的所有東西。
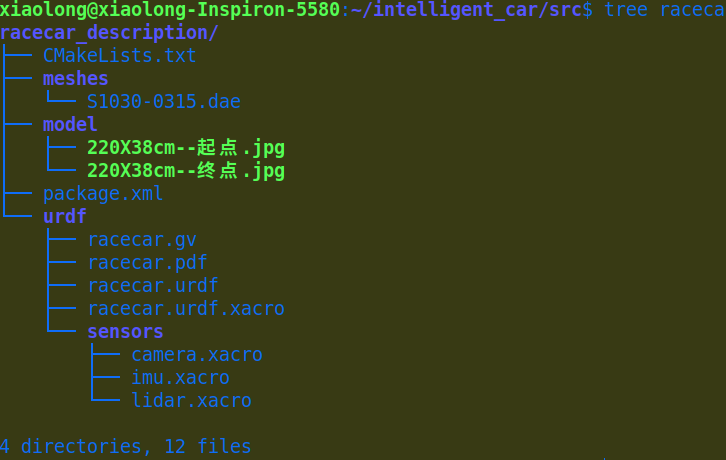
可以看到這個機器人的URDF模型還有它所擁有的傳感器,相機、慣性測量單元、激光雷達(dá)。
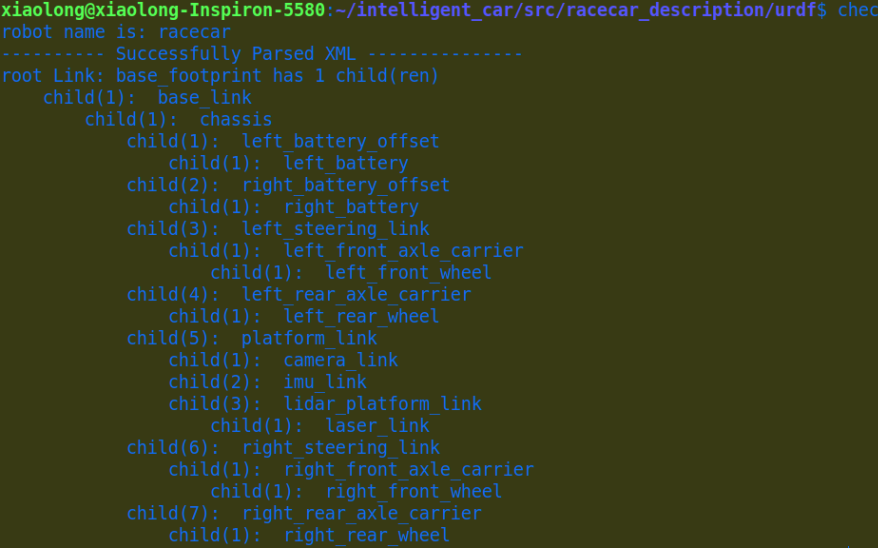
我們對URDF文件進(jìn)行檢查,check_urdf命令會解析URDF文件,并且顯示解析過程中發(fā)現(xiàn)的錯誤,如果一切正常,就會顯示如下信息:
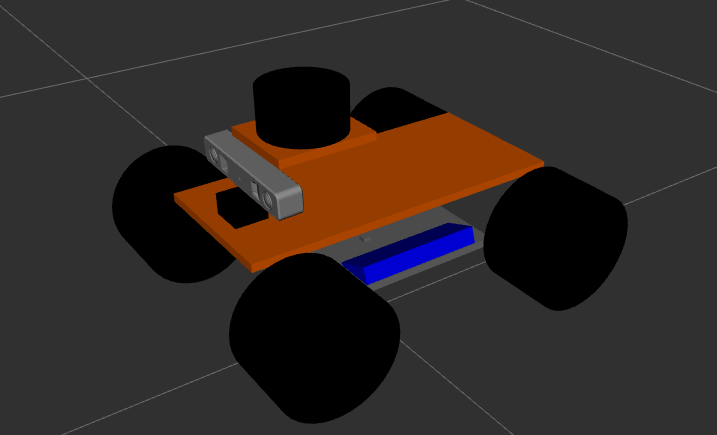
當(dāng)然我們也可以在rviz中查看這個模型:
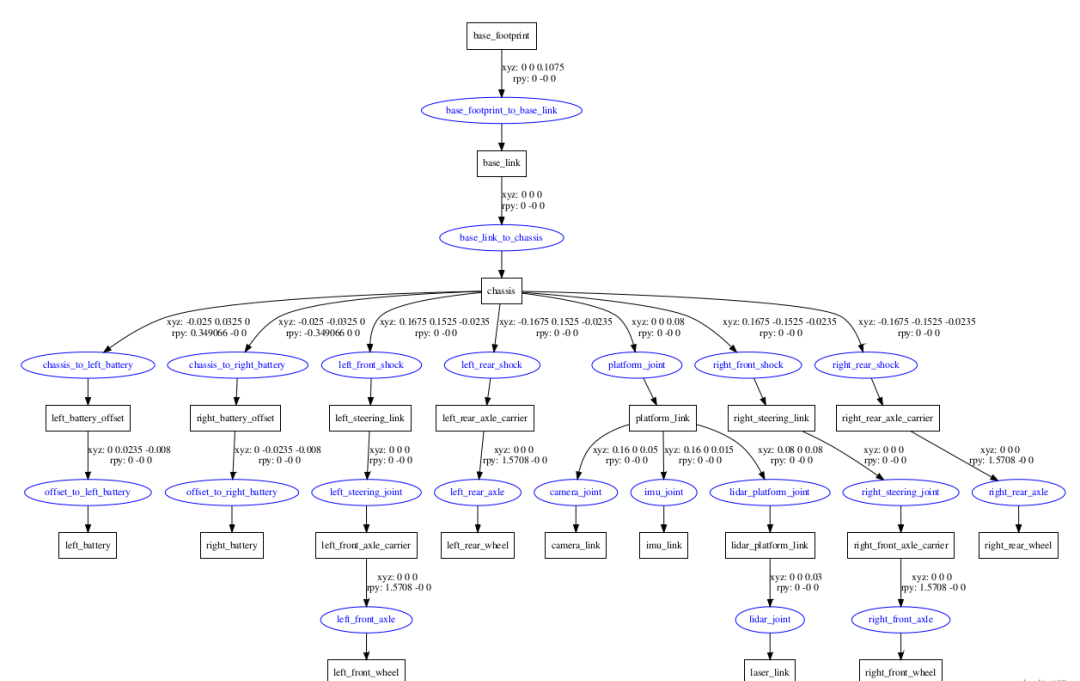
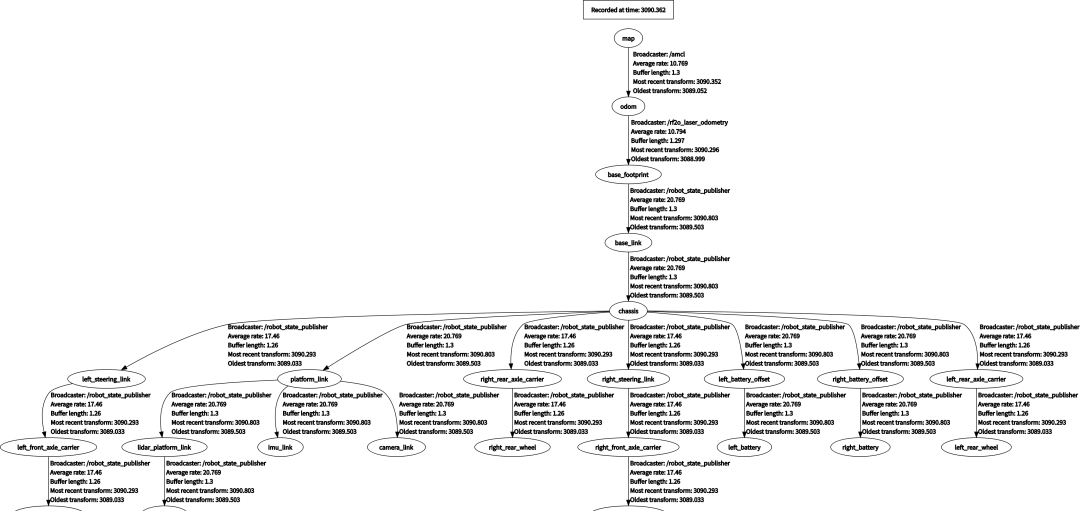
也可以看看機器人的TF關(guān)系:
2.運動控制器配置
接下來我們主要在gazebo環(huán)境下操作,我們再創(chuàng)建一個單獨的package,同樣我們先看看完整的內(nèi)容:
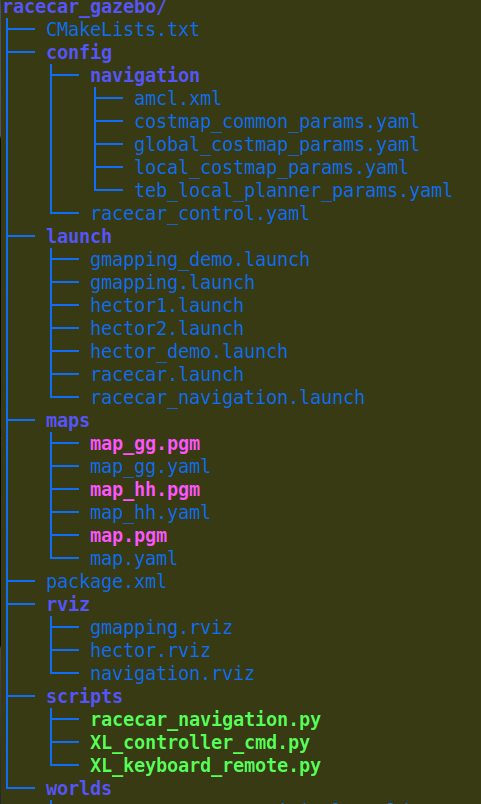
我們在config下可以看到一個racecar_control.yaml文件:
racecar: left_rear_wheel_velocity_controller: type: effort_controllers/JointVelocityController joint: left_rear_axle pid: {p: 1000.0, i: 0.00, d: 0.0} right_rear_wheel_velocity_controller: type: effort_controllers/JointVelocityController joint: right_rear_axle pid: {p: 1000.0, i: 0.00, d: 0.0} left_front_wheel_velocity_controller: type: effort_controllers/JointVelocityController joint: left_front_axle pid: {p: 1000.0, i: 0.00, d: 0.0} right_front_wheel_velocity_controller: type: effort_controllers/JointVelocityController joint: right_front_axle pid: {p: 1000.0, i: 0.00, d: 0.0} left_steering_hinge_position_controller: type: effort_controllers/JointPositionController joint: left_steering_joint pid: {p: 10000.0, i: 0.1, d: 500.0} right_steering_hinge_position_controller: type: effort_controllers/JointPositionController joint: right_steering_joint pid: {p: 10000.0, i: 0.1, d: 500.0} joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 50
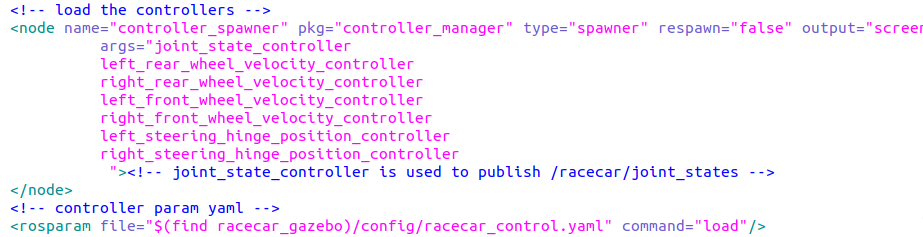
這個文件便定義了機器人所有的運動控制器以及參數(shù),我們通過launch文件添加以下內(nèi)容便可以加載這些控制器:
3.world創(chuàng)建
world的創(chuàng)建方法有很多了,你可以自己畫一個世界,也可以導(dǎo)入,這里可以給大家安利另外一個仿真神器:Webots,你會發(fā)現(xiàn)不一樣的東西。
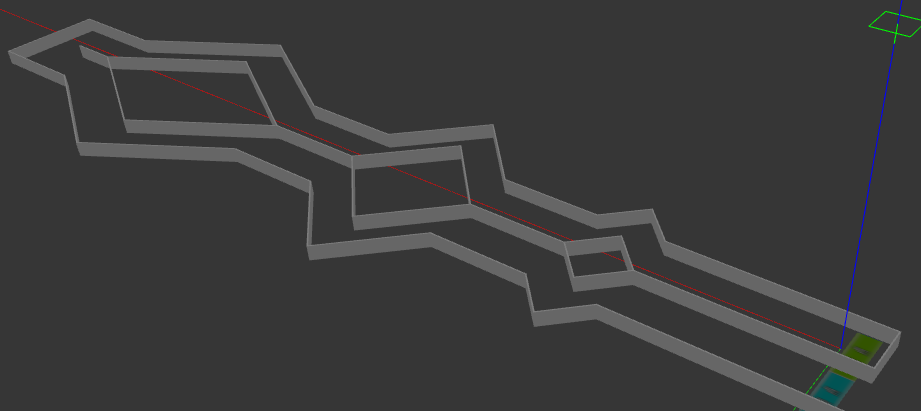
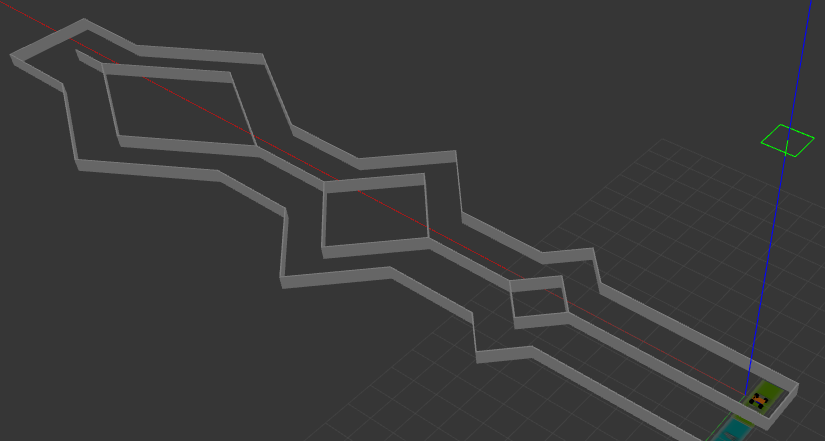
給大家看看比賽的官方賽道吧,使用gazebo racecar_runway_original.world 打開:
4.launch文件啟動并測試
我們先通過roslaunch racecar_gazebo racecar.launch 來打開小車所在的仿真環(huán)境:
我們可以看到racecar_gazebo/scripts下有一個XL_keyboard_remote.py的,我們可以通過rosrun racecar_gazebo XL_keyboard_remote.py運行它,然后我們的機器人就可以前后左右移動并且轉(zhuǎn)向啦(注意運行之后彈出來的窗口需要鼠標(biāo)點擊一下再控制機器人)。

二、建圖
建圖的話我們以Gmapping算法功能包為例子進(jìn)行地圖構(gòu)建,當(dāng)然可以用其它的算法,比如:hector,cartographer等。
1.參數(shù)配置
首先我們創(chuàng)建一個gmapping.launch,這個主要是負(fù)責(zé)配置參數(shù)的:
然后我們需要創(chuàng)建一個gmapping_demo.launch用來打開gazebo,rviz等并建圖:
代碼第一塊就是建圖參數(shù)的配置,第二塊就是打開之前的gazebo環(huán)境等,第三塊是打開鍵盤控制,第四塊是打開一個已經(jīng)配置好的rviz(配置的方法很簡單的,就是添加一些東西)。
2.launch文件啟動并建圖
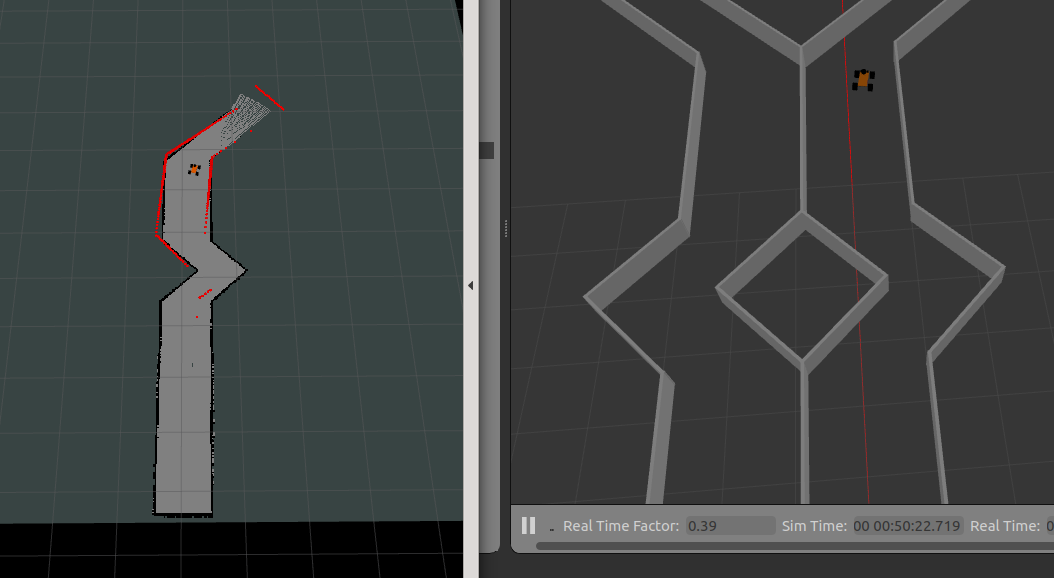
之所以創(chuàng)建一個gmapping_demo.launch是想直接啟動一個launch就可以開始建圖,我們直接在終端輸入roslaunch racecar_gazebo racecar.launch就可以開始建圖啦:

建圖過程需要有耐心,最好速度不要太快,當(dāng)然不同的算法適應(yīng)性也不太一樣,我們可以看看建圖效果還是可以的:
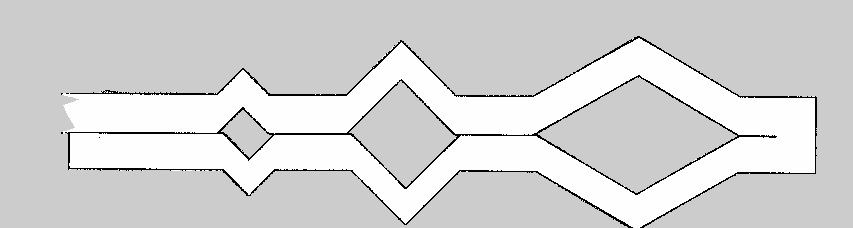
最后建成的地圖我們需要及時保存。保存的地圖一共有兩個文件,map.pgm和map.yaml。
讓我們看一下建好的地圖效果還是蠻不錯的:
三、導(dǎo)航
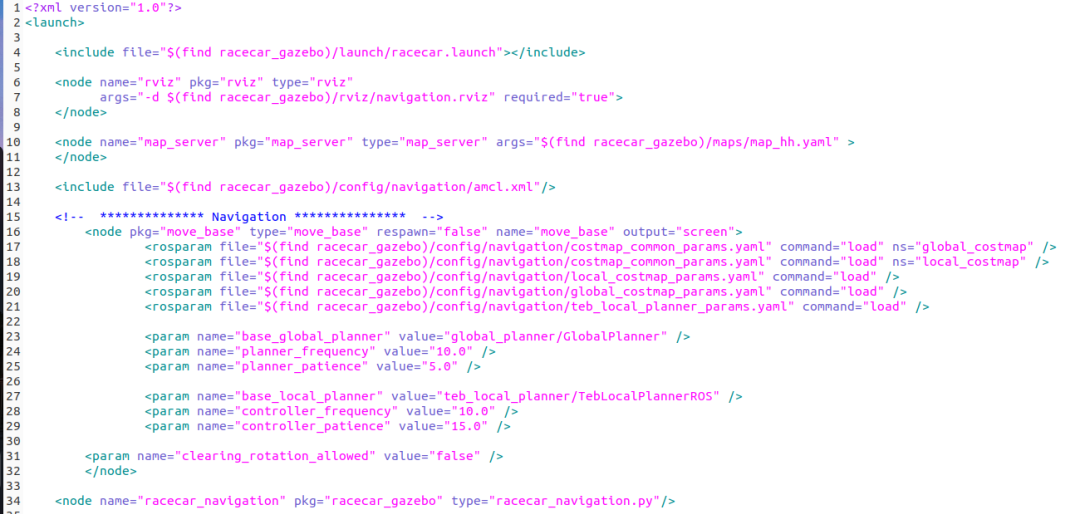
我們先來看一下導(dǎo)航的launch啟動文件,第4行就是啟動之前的launch文件;第6~8行是加載配置好的rviz;第10行是加載地圖;注意第13行,我們加載了一個amcl.xml文件,這個是我們配置的定位方法參數(shù)。
自主定位即機器人在任意狀態(tài)下都可以推算出自己在地圖中所處的位置,ROS為開發(fā)者提供了一種自適應(yīng)(或kld采樣)的蒙特卡羅定位方法(amcl),這是一種概率統(tǒng)計方法,針對已有地圖使用粒子濾波器跟蹤一個機器人的姿態(tài);第16~32行是導(dǎo)航需要的配置文件;第34行是一個導(dǎo)航腳本(自定義的一個ROS節(jié)點),初學(xué)者可以不用深究其內(nèi)容。
1.代價地圖的配置
導(dǎo)航功能包使用兩種代價地圖存儲周圍環(huán)境中的障礙信息:一種用于全局路徑規(guī)劃(global_costmap),一種用于本地路徑規(guī)劃和實時避障(local_costmap)。
兩種代價地圖需要使用一些共用的或獨立的配置文件:通用配置文件、全局規(guī)劃配置文件和本地規(guī)劃配置文件。config/navigation下這三個文件分別與之對應(yīng)。
代價地圖用來存儲周圍環(huán)境的障礙信息,其中需要聲明地圖關(guān)注的機器人傳感器消息,以便于地圖信息的更新。
針對兩種代價地圖通用的配置選項,創(chuàng)建名為costmap_common_params.yaml的配置文件。全局規(guī)劃配置文件用于存儲配置全局代價地圖的參數(shù),命名為global_costmap_params.yaml,本地規(guī)劃配置文件用來存儲本地代價地圖的配置參數(shù),命名為local_costmap_params.yaml。
2.本地規(guī)劃器的配置
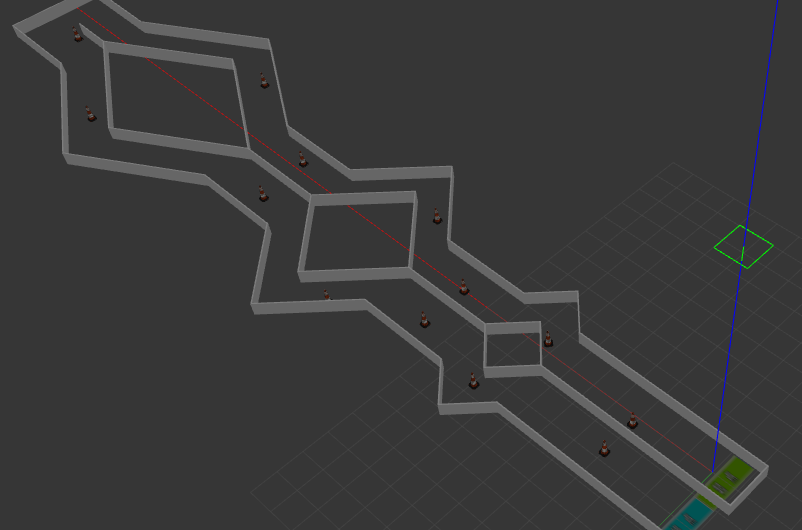
比賽一般都需要實時避障的,我們導(dǎo)航所用的地圖都是加上錐桶的,當(dāng)然我們在建圖的時候是不允許掃描錐桶的信息的,所以我們需要配置本地規(guī)劃器,我們通過gazebo racecar_runway.world 打開環(huán)境如下:
常用的本地規(guī)劃算法有TEB算法和DWA算法,這篇教程主要用的TEB算法,本地規(guī)劃器當(dāng)然也是用的TEB算法的參數(shù),具體可以查看最后一個配置文件teb_local_planner_params.yaml。
3.launch文件啟動并導(dǎo)航
我們通過roslaunch racecar_gazebo racecar_navigation.launch來開始導(dǎo)航前所有準(zhǔn)備工作:
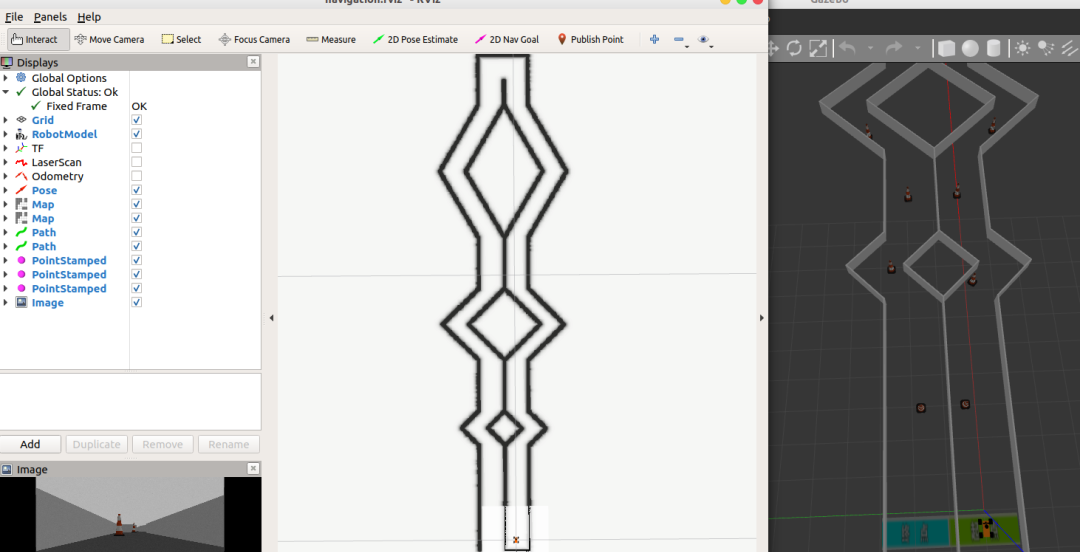
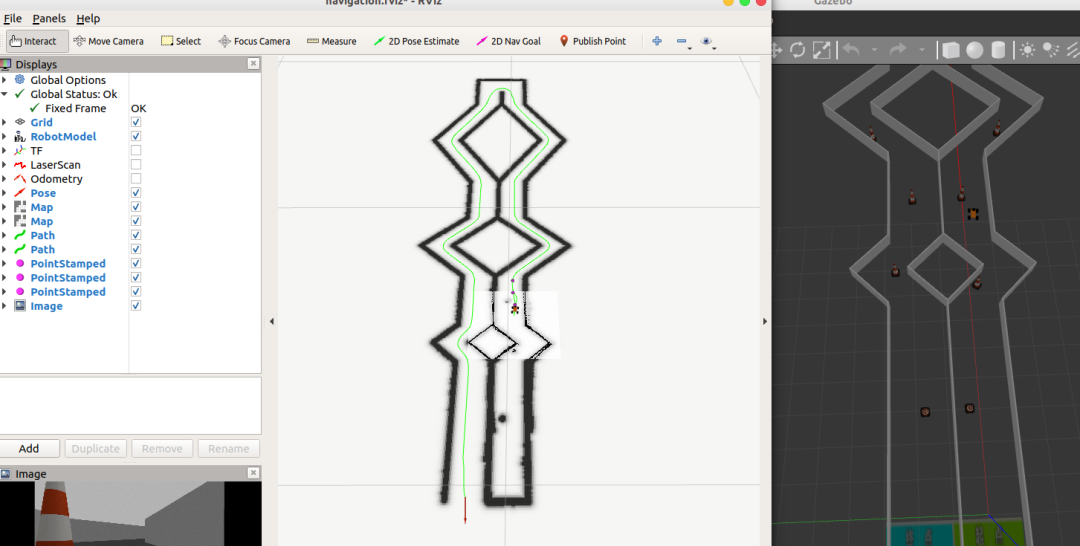
通過rviz上2D Nav Goal來給機器人發(fā)布導(dǎo)航終點信息,可以看出機器人已經(jīng)開始實時掃描信息并規(guī)劃路徑向著終點出發(fā)啦:
我們可以通過rosrun rqt_tf_tree rqt_tf_tree來查看導(dǎo)航過程中的TF樹:
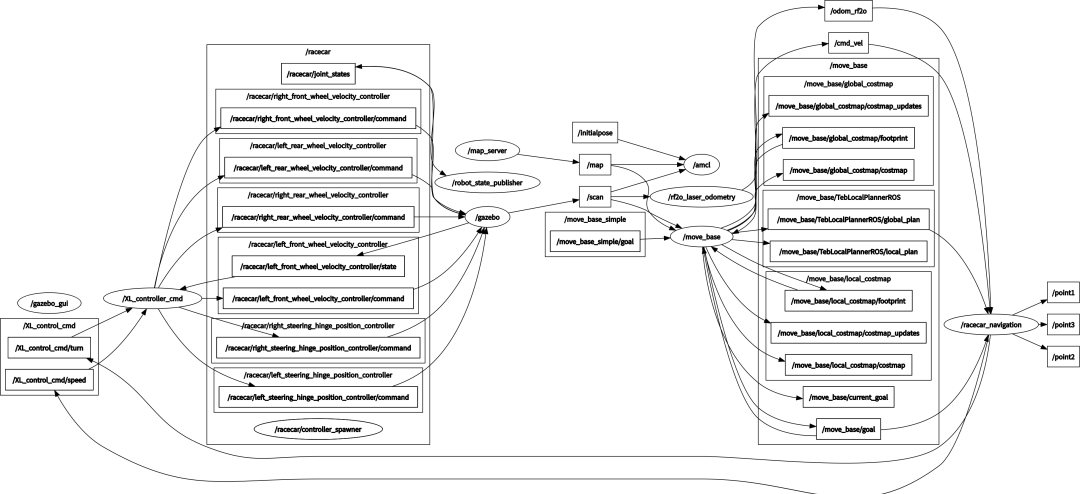
也可以通過rosrun rqt_graph rqt_graph來查看導(dǎo)航過程中的各節(jié)點:
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791375 -
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222280 -
仿真
+關(guān)注
關(guān)注
54文章
4483瀏覽量
138279 -
導(dǎo)航
+關(guān)注
關(guān)注
7文章
577瀏覽量
43929 -
ROS
+關(guān)注
關(guān)注
1文章
293瀏覽量
18740
原文標(biāo)題:基于ROS的機器人建圖與導(dǎo)航仿真全過程
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發(fā)實踐
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+ROS2應(yīng)用案例
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
激光導(dǎo)航AGV底盤定制 巡檢機器人,服務(wù)機器人,智慧物流搬運AGV
走到哪都不會迷路,全自動機器人是怎么導(dǎo)航的?
讓機器人完美建圖的SLAM 3.0到底是何方神圣?
如何保存機器人建圖,用于后續(xù)定位導(dǎo)航
棗陽市工程BIM軟件全過程建筑咨詢單位
基于ROS系統(tǒng)實現(xiàn)導(dǎo)航機器人的精確方向和距離控制
ROS機器人定位導(dǎo)航仿真
如何對ROS機器人的定位導(dǎo)航進(jìn)行仿真
如何搭建實體機器人ros底盤
朱老師出新書了!!《ROS機器人編程零基礎(chǔ)入門》




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論