 蝙蝠機器人:蝙蝠仿生無人機
蝙蝠機器人:蝙蝠仿生無人機

這篇文章來源于DevicePlus.com英語網站的翻譯稿。
?Caltech
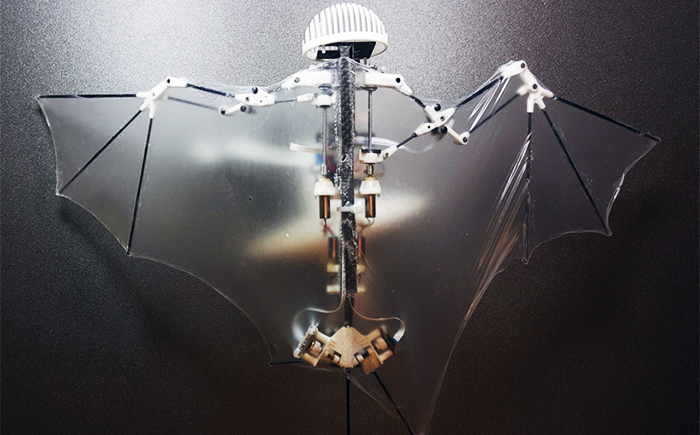
模仿蝙蝠飛行的蝙蝠仿生無人機
機器人創作和機器人機制的設計靈感通常來自動物行為。來自伊利諾伊大學香檳分校和加利福尼亞理工學院的研究團隊模仿蝙蝠翅膀結構,成功構建了一只完全獨立自主飛行的機器人——蝙蝠機器人(B2)。
蝙蝠在飛行中表現出卓越的敏捷性,這是因為它們能夠使用獨立控制的關節來調節翼展、翼彎和攻角。B2僅重93克,其形狀像一只真正的蝙蝠,并具有與蝙蝠飛行形態特性最匹配的可拉伸硅基薄膜翅膀。該機器人能夠通過彎曲、展開和扭轉其肩部、腕部、臀部、肘部和腿部來改變其翼形。
此項研究具有雙重意義。研究蝙蝠飛行能夠為飛行機器人振翼提供寶貴的見解,同時這種蝙蝠仿生機器人設計可以提供更安全的人類/無人機環境,具有實際應用意義。許多以前的項目主要模仿昆蟲飛行。大多數昆蟲的翅膀結構都是單一的未聯結結構單元,不像蝙蝠那樣復雜。與其他飛行動物相比,蝙蝠的飛行機制獨一無二。他們的飛行機制涉及多種不同類型的關節(比如球窩關節和旋轉關節),這些關節將骨骼和肌肉彼此互鎖在一起,形成具有超過40個自由度(DOF)的變質肌肉骨骼系統。研究人員表示,蝙蝠飛行的這些方面為飛行機器人提供了獨特視角。
與當前飛行機器人(比如四旋翼飛行器)相比,蝙蝠仿生飛行機器人擁有眾多優點。其中最大優點就是其柔軟的翅膀。受材料和設備(比如尖銳的轉子葉片或螺旋槳)以及高振幅噪聲限制,傳統的四旋翼飛行器和其他旋翼飛機被認為對人類不安全。另一方面,具有蝙蝠柔韌翅膀的機器人主要由柔性材料組成,并且振翼頻率更低(7至10Hz,而四旋翼飛行器為100至300Hz)。這種機器人在穿越不同的環境時,其操作和飛行更加安全,幾乎不會造成任何損壞。
蝙蝠飛行運動學中的主要自由度在B2的振翼、前肢中間運動、手指屈曲伸展、腕部(將手連到前肢的小骨頭)旋前旋后轉以及腿背側運動的設計中得到了充分體驗。
這種“生物學意義上的”自由度使得研究人員能夠以更簡單的設計來模擬蝙蝠的飛行運動,但是功能相同。
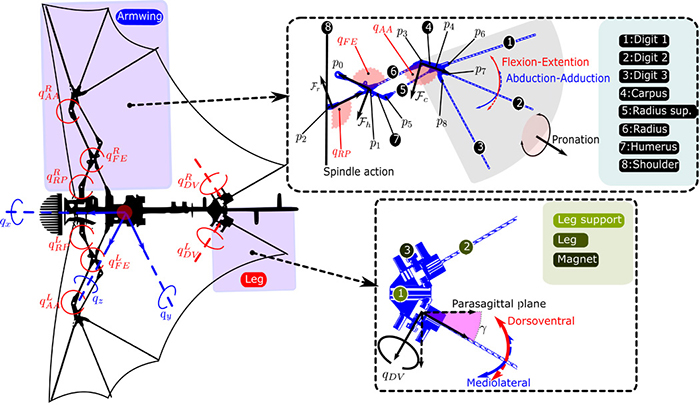
圖1. 蝙蝠機器人的飛行機制及其自由度/?Ramezani等人,2017
蝙蝠機器人的飛行機構由2個翅膀(左翼和右翼)組成,每個翅膀包括一個前肢和一個后肢機構。左翼和右翼通過機械振蕩器耦合在一起。憑借曲軸機構,兩只翅膀可以同步朝背腹方向移動。每只翅膀還可以執行異步和中間運動。影響翅膀后緣的后肢(腿)可以執行異步的背腹方向運動。前肢由九個環節或關節組成:肱骨(p0-p1)、肱骨支撐(p1-p2)、橈骨(p1-p3)、橈骨支撐(p4-p5)、腕骨(p3-p4)、腕關節支撐(p1-p5)以及三個數字鏈接(圖1,右上)。
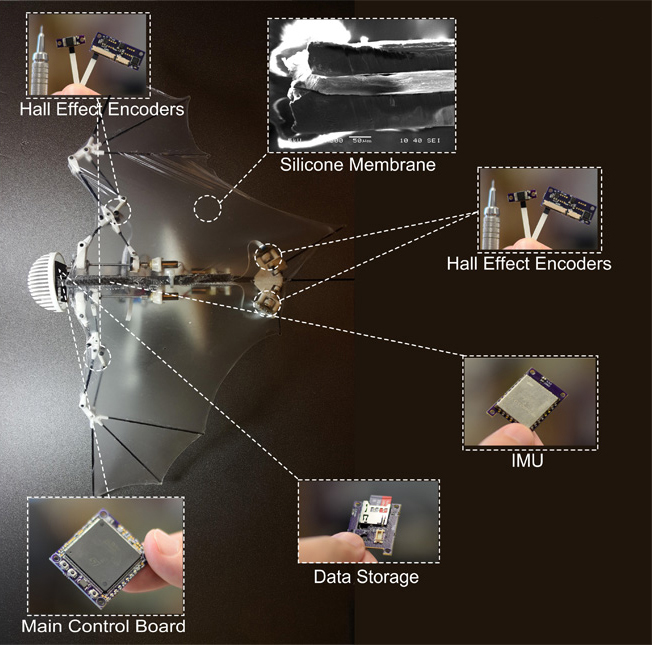
圖2. 蝙蝠機器人(B2)的電子部件/?Ramezani等人,2017
B2的獨特特征之一就是可以在沒有遙控器的情況下飛行。B2的飛行控制系統由其板載傳感器、帶編碼器反饋的高性能微型電機和微處理器組成。傳統的固定翼MAV通常通過推動和常規控制面來控制,而B2具有九個主動擺動關節,需要進行適當的控制工作分配。
B2由板載計算機以及執行自主導航的多個傳感器組成。這些電子產品專門針對這種自主系統定制,而且都配置在機器人內部,這意味著B2的外部沒有電子產品。B2頭部的MCB搭載了一個微處理器,并且能夠實時處理導航和控制算法。傳感器數據通過數據采集單元獲取;數據采集單元還負責指揮微致動器。傳感單元由小尺寸定制電路板組成,通過記錄兩種測量值與傳感器和MCB相連接。位于胸腔中的慣性測量單元(IMU)(其中x軸指向前方,而y軸指向上方)負責讀取機器人相對于慣性框架的高度。位于肘部、臀部和拍打關節的五個霍爾效應編碼器負責讀取四肢之間相對于身體的相對角度。
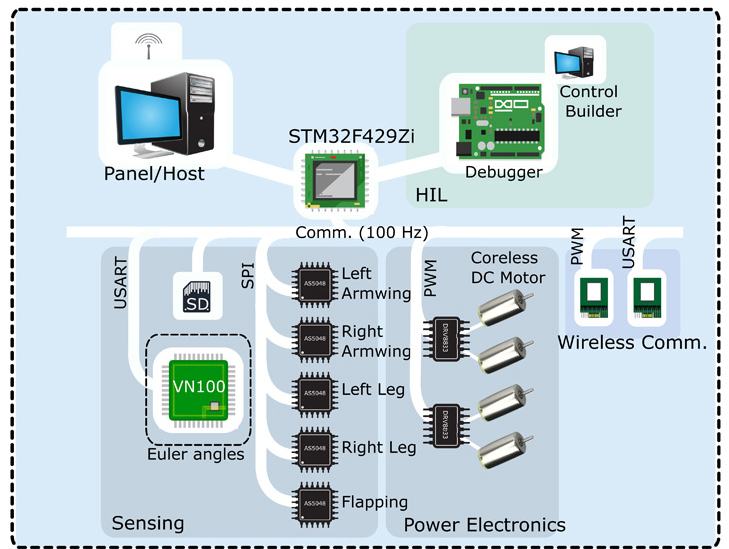
圖3. 蝙蝠機器人的數據流程圖/?Ramezani等人,2017
B2的數據流程圖如圖3所示。中心微處理器(STM32F429Zi)負責與許多電子設備通信,其中包括SD卡、IMU(VN-100)、五個霍爾效應編碼器(AS5048)和兩個雙直流電機驅動器。在無線通信方面,系統配備了兩個8通道微型RC接收器(DSM2)和一個藍牙設備,負責與主機或面板進行通信。研究人員使用硬件在環(HIL)仿真試驗測試平臺上的控制器。在HIL中,飛行控制器嵌在物理微處理器上,研究人員采用實時計算機作為虛擬設備(模型),負責響應虛擬模型的變量狀態。
蝙蝠翼皮中的彈性網絡通過覆蓋在翅膀骨骼上的超薄(56微米)皮膚實現。由于前肢和腿部運動的限制,傳統的織物覆蓋材料,比如尼龍膜,并不適合B2機身。因此,該團隊采用了一種定制硅膠膜,其彈性足以匹敵真實蝙蝠翼膜的彈性。由于逆向工程無法實現所有的特性,因此該團隊只將注意力集中在翼膜的幾個屬性上。他們發現蝙蝠生物皮膚的關鍵解剖學特性如下:1)單位面積重量(面積密度);2)拉伸模量;和3)拉伸性。
通過一系列機械約束和反饋控制設計,目前設計實現了主的要振翼關節,能夠控制蝙蝠機器人以六個自由度飛行。蝙蝠具有復雜的肌肉骨骼系統(即多個主動和被動關節),這使得研究人員很難將所有關節納入其設計中。然而毫無疑問,B2已經朝著復雜蝙蝠運動邁出了眾多第一步中的一步。該模型有助于進一步研究蝙蝠飛行中的翼展運動模式,并重建生物蝙蝠的飛行行為。

Yulhane-Jerez Koh
Yulhane畢業于加州大學伯克利分校(UC Berkeley),是一名生物力學工程師,同時也是美國deviceplus公司的執行編輯。Yulhane的主要興趣在于群體機器人、機器學習和神經科學領域。
審核編輯黃宇
-
無人機
+關注
關注
236文章
11298瀏覽量
195630
發布評論請先 登錄
天數智算物流與環衛無人機器人解決方案:重構物流與環衛新秩序?

解碼核心:無人機無線充電模塊如何實現工業場景下的高效與安全?
宇樹科技發布H2仿生人形機器人
無人機與機器人協同技術日益廣泛的應用
無人機操控核心:智能飛行的技術引擎
1080P低延時網絡相機 直擊無人機、機器人視頻傳輸痛點

離軸技術:賦能無人機精準配送的核心芯片應用
微型化IMU如何突破無人機與機器人的性能邊界?
可靠性測試裝備為仿生機器人未來發展賦能

科普|無人機反制槍介紹




 工商網監
工商網監
評論