 如何實現大視場FoV更高角度分辨率的激光雷達呢
如何實現大視場FoV更高角度分辨率的激光雷達呢

基于各種工作原理的激光雷達(LiDAR)已經在許多領域獲得應用,例如機器人導航、自動駕駛、無人機、地面勘測等。然而,激光收發器的數量限制了傳統多通道激光雷達系統的垂直角度分辨率,并使其成本高昂。而MEMS微鏡的興起,能夠為低成本、高角度分辨率的激光雷達系統提供非常有前景的解決方案。
據麥姆斯咨詢報道,香港城市大學機械工程學院的研究人員通過結合機械旋轉式激光雷達系統和MEMS微鏡各自的優勢,以更合理的系統成本實現了大視場(FoV)、更高角度分辨率的激光雷達解決方案。研究人員將MEMS微鏡集成在自行設計的獨立收發器模塊中,并與360°旋轉平臺集成,以實現全景掃描。
與基于多通道的激光雷達系統相比,該系統不受激光源和探測器數量的限制,能夠實現0.07°x 0.027°(水平x垂直)的角度分辨率以及360°x 8.6°(水平x垂直)的視場。該研究成果已經以“Development of the high angular resolution 360° LiDAR based on scanning MEMS mirror”為題發表于Scientific Reports期刊。
采用上述系統配置,能夠以合理的價格(1700美元)實現360°視場的激光雷達系統。最后,研究人員還開發了一款數據處理程序,可以將掃描數據轉換為3D點云圖像,生成的圖像驗證了這款基于MEMS微鏡的激光雷達系統的完整功能。
設計和原理
脈沖飛行時間(ToF)激光雷達系統的基本結構如下圖所示。該系統由具有準直功能的905 nm激光模塊(OSRAM SPLPL90)產生短激光脈沖。激光脈沖通過MEMS微鏡的單軸反射實現垂直方向掃描,然后通過360°旋轉平臺實現全景掃描。再由探測器檢測來自環境物體的反射脈沖。激光脈沖的飛行時間(借助快速運行的計數器測量)與環境物體和傳感器之間的距離直接相關,從而通過數據處理可以實現周圍環境的3D感知。
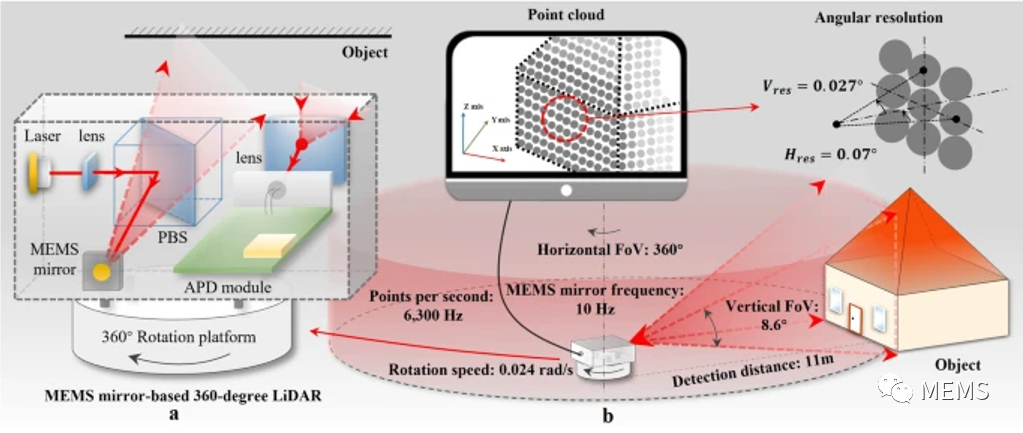
基于MEMS微鏡的360°激光雷達系統:(a)激光雷達系統示意圖,(b)激光雷達的工作場景和參數。
激光雷達系統的角度分辨率表示傳感器可以分辨的兩點之間的最小角度或線性間隔。換句話說,它可以被視為單位面積的單位脈沖數。因此,更高分辨率的激光雷達可以創建更密集的點云圖。
基于MEMS微鏡的360°激光雷達系統
激光雷達系統應用通常要求角度分辨率
在這項研究中,研究人員使用了機械角度為5°的MEMS微鏡(Mirrorcle S45868),可受益于點對點或準靜態光束轉向。這意味著任何穩態模擬驅動電壓都可以導致MEMS微鏡的特定穩態模擬旋轉角度,從而實現特定的光束方向。在DC(0 Hz)附近,注意到驅動電壓和產生角度的一一對應關系:它具有高度可重復性,不會隨時間發生可測量的退化。此外,通過增加變壓器和杠桿結構,驅動范圍可以擴大。它還具有優異的抗機械沖擊和振動性能,功耗小于1 mW,并為標準的硅基量產工藝而設計。
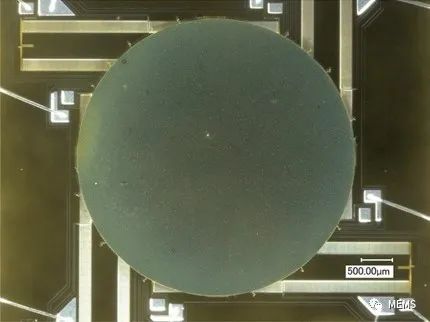
MEMS微鏡結構
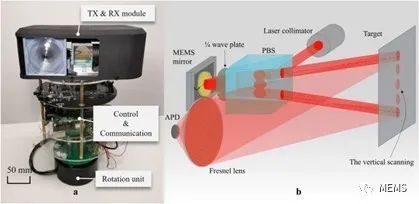
激光雷達系統設計:(a)360°激光雷達系統的結構,(b)發射和接收模塊示意圖。
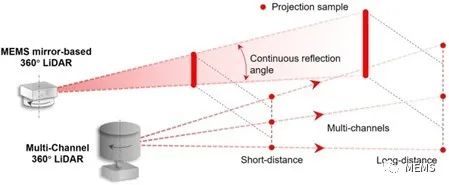
基于MEMS微鏡的激光雷達和多通道激光雷達的掃描機理對比
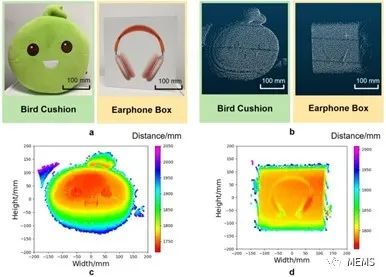
掃描試驗結果:(a)掃描對象(抱枕和耳機盒)照片,(b)掃描點云圖,(c)抱枕深度圖,(d)耳機盒深度圖。
增大接收模塊視場的有效方法是采用具有更大有效面積的雪崩光電二極管(APD)。對于這項工作,研究人員選擇了有效區域直徑為1.5mm的APD,并采用了直徑為50 mm、焦距為10 mm的菲涅耳透鏡,以實現8.6°的垂直視場。
總結來說,研究人員展示了一種基于MEMS微鏡的具有高垂直掃描分辨率的360°激光雷達系統。該系統的水平掃描通過360°旋轉平臺實現,而垂直掃描通過MEMS微鏡實現。基于水平和垂直掃描要求,通過設計激光發射器和APD接收器的光路,并開發控制和通信電路,實現了完整的激光雷達系統。
根據實驗結果,該系統在視場(水平方向360°,垂直方向8.6°)和角度分辨率(水平方向0.07°,豎直方向0.027°)方面取得了良好的性能。和市售Velodyne HDL-64激光雷達傳感器相比,該系統的垂直角度分辨率提高了13.8倍。該特性可進一步實現高質量全景掃描,能夠為自動駕駛、機器人導航、室內測量等應用提供更經濟的解決方案。
審核編輯:劉清
-
mems
+關注
關注
129文章
4475瀏覽量
198809 -
探測器
+關注
關注
15文章
2763瀏覽量
75901 -
激光雷達
+關注
關注
979文章
4470瀏覽量
196539 -
激光收發器
+關注
關注
0文章
6瀏覽量
7910
原文標題:結合MEMS微鏡和機械旋轉平臺,實現高角度分辨率360°激光雷達
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
從點云到圖像級!華為新一代896線激光雷達來襲,分辨率提升4倍

激光雷達點云中的空洞現象是什么原因導致的?
【科研動態】新一代集成光子FMCW激光雷達光源的設計框架與性能權衡

毫米波雷達如何用距離與角度分辨率感知世界

納芯微柵極驅動器NSD2017在激光雷達應用中PCB設計的注意點

800線全球最高!禾賽新一代高性能激光雷達首發亮相:艙內可用

決定自動駕駛激光雷達感知質量的因素有哪些?


全固態激光雷達為什么遲遲未來?其技術難點是什么?
FMCW激光雷達,加速落地工業場景
SPAD席卷車載激光雷達市場
10000Hz!超高頻激光雷達助力無人機避障
激光雷達(LiDAR)技術方案與工作原理全解析

自動駕駛激光雷達:原理、類型與應用梳理

2025激光雷達最新報告:速騰聚創全球市占率第一



 工商網監
工商網監
評論