 FANUC工業機器人的運動指令
FANUC工業機器人的運動指令

FANUC工業機器人運動指令如下所示,運動指令包含運動類型、位置指示符號、位置數據類型、移動速度、定位類型、動作附加指令。
L @P[i] 400mm/sec FINE offset
“L”表示直線運動,運動指令中運動類型可為:J:Joint(關節運動)、L:Linear(直線運動)、C:Circular(圓弧運動)。
“@”表示當前位置指示。
“P[i]”表示i位置的一般位置數據,運動指令中位置數據類型可為:P[ ]: 一般位置、PR[]: 位置寄存器,i在其中表示位置號。
“400mm/sec”表示工業機器人在運動過程中移動速度。
“FINE”表示運動的精確定位,運動的定位類型可為:FINE(精確定位)、CNT(非精確定位)。
“offset”表示運動位置補償指令,運動附加指令可為:ACC(加減速倍率指令)、offset(位置補償指令)、INC(增量指令)等。
運動類型
1、FANUC工業機器人運動類型有:不進行軌跡控制/姿勢控制的關節運動、進行軌跡控制/姿勢控制的直線運動、以及圓弧運動。
2、關節運動 (J)
3、直線運動(包含旋轉移動) (L)
4、圓弧運動 (C)
(1) 關節運動J
關節運動是機器人沿著所有軸同時加速,在示教速度下移動后,同時減速后停止,通常移動軌跡為非線性。關節移動速度的單位,以相對最大移動速度的百分比來記述。關節運動中中的工具姿勢不受到控制。
例子:
1:J P[1] 100% FINE
2:J P[2] 70% FINE
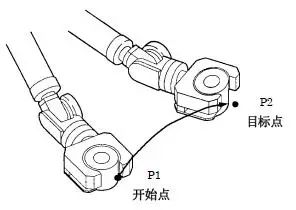
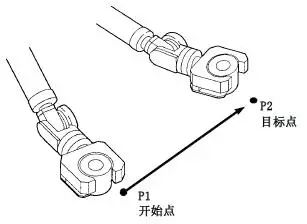
(2) 直線運動L
1) 直線運動是以線性方式對從運動開始點到結束點。直線移動速度的單位,從mm/sec、cm/min、inch/min、sec 中選擇。直線運動中的工具姿勢可以受到控制。
例:
1:J P[1] 100% FINE
2:L P[2] 500mm/sec FINE
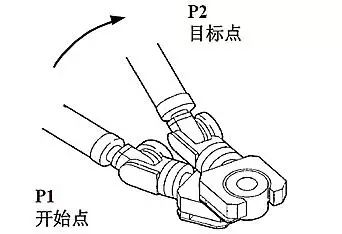
2) 旋轉運動是使用直線運動,使工具的姿勢從開始點到結束點以工具尖點為中心旋轉的一種移動方法。旋轉運動中的工具姿勢可以受到控制。此時,移動速度要用deg/sec 為單位。移動軌跡(工具尖點移動的情況下)通過線性方式進行控制。
例:
1:J P[1] 100% FINE
2:L P[2] 30deg/sec FINE
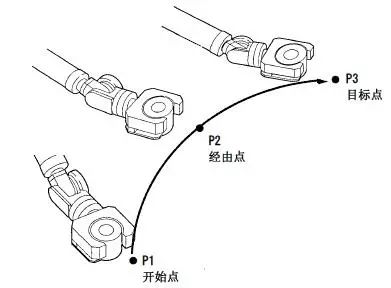
(3) 圓弧運動C
圓弧運動是從運動開始點通過經由點到結束點以圓弧方式運動。其在一個指令中對經由點和目標點進行示教。圓弧移動速度的單位,從mm/sec、cm/min、inch/min、sec 中選擇。圓弧運動中的工具姿勢可以受到控制。
例:
1:J P[1] 100% FINE
2:C P[2]:P[3] 500mm/sec FINE
-
工業機器人
+關注
關注
91文章
3533瀏覽量
98172 -
Fanuc
+關注
關注
19文章
121瀏覽量
38804
原文標題:【技術】FANUC工業機器人運動指令解析!
文章出處:【微信號:指南車機器人科技,微信公眾號:指南車機器人科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
哈默納科Harmonic精密減速器 工業機器人關節運動的核心部件
小蘿卜機器人的故事
機器人 VFD 電纜選型時的運動性能考量
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人線束揭秘 | 性能加持助力機器人作業效率穩定躍升

工業機器人的特點
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例

工業通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
工業機器人與協作機器人概念不同




 工商網監
工商網監
評論