") 機(jī)器視覺的優(yōu)勢及應(yīng)用領(lǐng)域(下)
機(jī)器視覺的優(yōu)勢及應(yīng)用領(lǐng)域(下)

5.視覺處理器
視覺處理器集采集卡與處理器與一體。以往計算機(jī)速度較慢時,采用視覺處理器加快視覺處理任務(wù),現(xiàn)在由于采集卡可以快速傳輸圖像到存儲器,而且計算機(jī)也快多了,所以現(xiàn)在視覺處理器用的較少了。
【工業(yè)鏡頭】
1.工業(yè)鏡頭的接口:
C型:C型接口鏡頭與攝像機(jī)接觸面至鏡頭焦平面(攝像機(jī)CCD光電感應(yīng)處的位置)的距離為17.5mm
CS型:CS型接口距離為12.5mm,CS型鏡頭與CS型攝像機(jī)可以配合使用。C型鏡頭與CS型攝像機(jī)之間增加一個5mm的C/CS轉(zhuǎn)接環(huán)可以配合使用,CS型鏡頭與C型攝像機(jī)無法配合使用。
F型:通用型接口,一般適用于焦距大于25mm的鏡頭。
【基本參數(shù)】
視場 :即FOV,也叫視野范圍,指觀測物體的可視范圍,也就是充滿相機(jī)采集芯片的物體部分。
工作距離 :即WD,指從鏡頭前部到受檢測物體的距離,即清晰成像的表面距離。
分辨率 :圖像系統(tǒng)可以測到的受檢驗物體上的最小可分辨率特征尺寸,在多數(shù)情況下,視野越小,分辨率越好。
景深 :即DOF,物體離最佳焦點較近或比較較遠(yuǎn)時,鏡頭保持所需分辨率的能力。
焦距 (f):是光學(xué)系統(tǒng)中衡量光的聚集或發(fā)散的度量方式,指從透鏡的光心到光聚焦之焦點的距離,也是照相機(jī)中,從鏡片中心到底片或CCD等成像平面的距離。
焦距大小的影響情況 :焦距越小,景深越大;焦距越小,畸變越大;焦距越小,漸暈現(xiàn)象越嚴(yán)重,使像差邊緣的照度降低。
失真 :又稱為畸變,指被攝物平面內(nèi)的主軸直線,經(jīng)光學(xué)系統(tǒng)成像后變?yōu)榍€,則此光學(xué)系統(tǒng)的成像誤差稱為畸變,畸變像差只影響影像的幾何形狀,而不影響影像的清晰度。
光圈與F值 :光圈是一個用來控制鏡頭通光量的裝置,它通常是在鏡頭內(nèi),表達(dá)光圈大小我們是用F值,如f2,f4。
【工業(yè)相機(jī)的選擇要點】
1.視野范圍 、光學(xué)放大倍數(shù)及期望的工作距離:在選擇鏡頭時,我們會選擇比被測物體視野稍大一點的鏡頭,有利于運動控制。
2.景深要求 :對于對景深有要求的項目,盡可能使用小光圈;在選擇放大倍率的鏡頭時,在項目許可下盡可能選用低倍率鏡頭;如果項目要求比較苛刻時,傾向選擇高景深的尖端鏡頭。
3.芯片大小和相機(jī)接口 :例如2/3鏡頭支持最大的工業(yè)相機(jī)耙面為2/3,它是不能支持1英寸以上的工業(yè)相機(jī)。
4.注意與光源的配合,選配合適的鏡頭。
5.可安裝空間 :在方案可選擇情況下,讓客戶更改設(shè)備尺寸是不現(xiàn)實的。
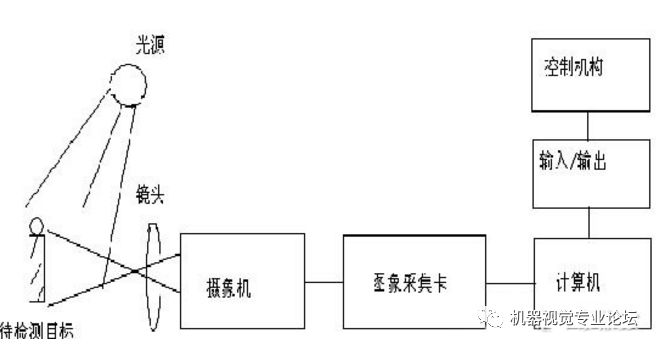
機(jī)器視覺檢測系統(tǒng)是采用CCD照相機(jī)將被檢測的目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號,圖像處理系統(tǒng)對這些信號進(jìn)行各種運算來收取目標(biāo)的特征,如面積、數(shù)量、位置、長度,再根據(jù)預(yù)設(shè)的允許度和其他條件輸出結(jié)果,包括尺寸、角度、個數(shù)、合格/不合格、有/無等,實現(xiàn)自動識別功能。
【機(jī)器視覺的應(yīng)用領(lǐng)域】
1.識別
2.標(biāo)準(zhǔn)一維碼、二維碼的解碼
3.光學(xué)字符識別(OCR)和確認(rèn)(OCV)
4.檢測
5.色彩和瑕疵檢測
6.零件或部件的有無檢測
7.目標(biāo)位置和方向檢測和測量
8.尺寸和容量檢測
9.預(yù)設(shè)標(biāo)記的測量,如孔位到孔位的距離
10.機(jī)械手引導(dǎo)
11.輸出空間坐標(biāo)引導(dǎo)機(jī)械手精確定位
-
CCD
+關(guān)注
關(guān)注
32文章
905瀏覽量
149365 -
機(jī)器視覺
+關(guān)注
關(guān)注
165文章
4797瀏覽量
126045 -
CMO
+關(guān)注
關(guān)注
0文章
13瀏覽量
9145
發(fā)布評論請先 登錄
機(jī)器視覺在焊接領(lǐng)域大展身手
感受技術(shù)之美!了解機(jī)器視覺的典型架構(gòu)與應(yīng)用領(lǐng)域
機(jī)器視覺檢測設(shè)備的優(yōu)勢
機(jī)器視覺系統(tǒng)測量有哪些優(yōu)勢?
無線測量系統(tǒng)的應(yīng)用領(lǐng)域有哪些?其優(yōu)勢是什么?
機(jī)器視覺測試系統(tǒng)具有哪些特性應(yīng)用?
深圳CCD視覺對位系統(tǒng)有什么功能及應(yīng)用領(lǐng)域?
Vision機(jī)器視覺LED光源技術(shù)及應(yīng)用領(lǐng)域
基于機(jī)器視覺系統(tǒng)構(gòu)成及應(yīng)用領(lǐng)域

什么是機(jī)器視覺?機(jī)器視覺的優(yōu)勢和應(yīng)用領(lǐng)域
機(jī)器視覺的系統(tǒng)組成、特點、應(yīng)用領(lǐng)域及優(yōu)勢

機(jī)器視覺在工業(yè)上的應(yīng)用領(lǐng)域
機(jī)器視覺的應(yīng)用領(lǐng)域介紹
機(jī)器視覺的優(yōu)勢及應(yīng)用領(lǐng)域(上)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論