 ScanContext論文詳解:Lidar SLAM 回環檢測、空間描述符
ScanContext論文詳解:Lidar SLAM 回環檢測、空間描述符

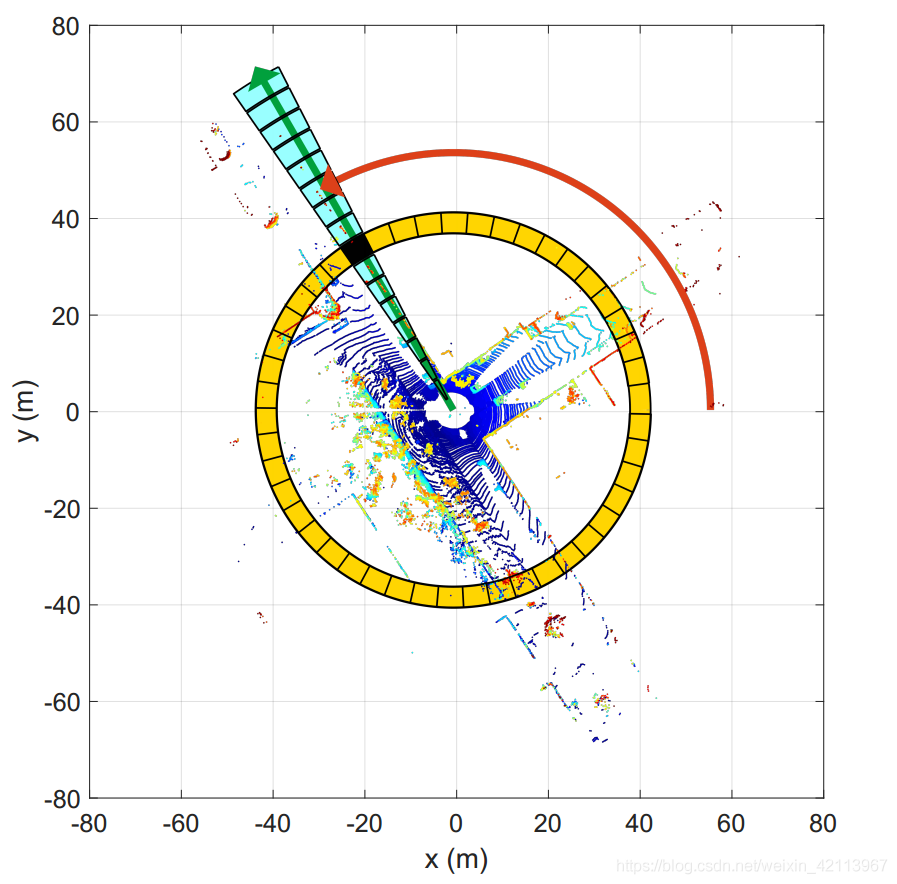 Figure 1. 激光雷達沿著方位角(淺藍)與放射方向(黃)的Bin分割 [1]
Figure 1. 激光雷達沿著方位角(淺藍)與放射方向(黃)的Bin分割 [1]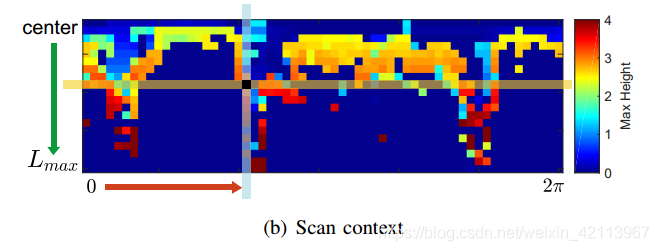 Figure 2. Scan Context示意圖 [1]
Figure 2. Scan Context示意圖 [1]
1
淺讀文章Scan Context,從英文字面理解就是“掃描 上下文”。類比于我們閱讀的時候,需要理解上下文,才能明白其意,LidarSLAM在進行回環檢測的時候,也需要將“上下文” (之前的數據)進行比較,方才知道我們是不是又走到了之前的同一個地方(回環)。Scan Context這篇文章由韓國KAIST大學的Giseop Kim和Ayoung Kim所寫,它的主要特點是提出了Scan Context這個非直方圖的全局描述符,來幫助我們對“上下文”(當前/之前的數據)進行更快速、有效地搜索。典型的應用就是在LiDAR SLAM中進行回環檢測和Place Recognition。2
提出的方法?The representation that preserves absolute location information of a point cloud in each bin (如圖2所示)?Efficient bin encoding function? Two-step search algorithm3
算法流程
3.1 Scan Context的創建
(1) 與Shape Context的淵源
Scan Context這個算法其實一開始是由Shape Context [2] 所啟發的,而Shape Context是把點云的 local Keypoint 附近的點云形狀 encode 進一個圖像中。Scan Context的不同在于,它不僅僅是count the number of points,而是采用了maximum height of pointsin each bin(簡單來說,就是取每一個bin中的所有point的z軸最高點的value作為這個bin的value)。(2) 為什么選擇Maximum height?
a. The reason for using the height is to efficiently summarize the vertical shape of surrounding structures.b. In addition, the maximum height says which part of the surrounding structures is visible from the sensor.c. This egocentric visibility has been a well-known concept in the urban design literature for analyzing an identity of a place(3) Partition a 3D scan
首先,對每一次Scan進行分割:? Nr: number of rings (黃色圈圈)? Ns: number of sectors (淺藍色/綠色?的格子)? Lmax: 雷達每一個射線的最遠距離? Radial Gap between rings = ? Sector弧度 =
? Sector弧度 = ? 文章中: Nr=20, Ns=60
? 文章中: Nr=20, Ns=60
(4) 給每個Bin進行賦值:Bin Encoding
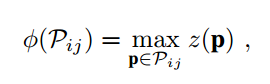
 就是指the set of points belonging to the bin where the ith ring and jth sector overlapped。? z(?)是指
就是指the set of points belonging to the bin where the ith ring and jth sector overlapped。? z(?)是指 中一個pointP的Z坐標。? 直接使用最大z坐標值 z(p),作為這個bin的value。
中一個pointP的Z坐標。? 直接使用最大z坐標值 z(p),作為這個bin的value。(5) Scan Context Matrix
A scan context I is finally represented as a Nr × Ns matrix as:

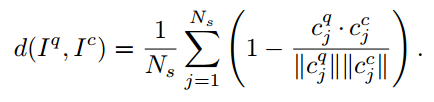
3.2 Similarity Score的計算
假設我們得到了一對Scan Context的矩陣,我們要計算他們倆( )之間的相似度,文章中采用了columnwise (按列) 的距離計算。
)之間的相似度,文章中采用了columnwise (按列) 的距離計算。 :Query Point Cloud (簡言之,我們當前用來query的點云)
:Query Point Cloud (簡言之,我們當前用來query的點云) :Candidate Point Cloud (咱們的“數據庫”中儲存的用來匹配的candidate點云)
:Candidate Point Cloud (咱們的“數據庫”中儲存的用來匹配的candidate點云)  :Column j of Query Point Cloud (列向量)
:Column j of Query Point Cloud (列向量) :Column j of Candidate Point Cloud (列向量)
:Column j of Candidate Point Cloud (列向量)
–
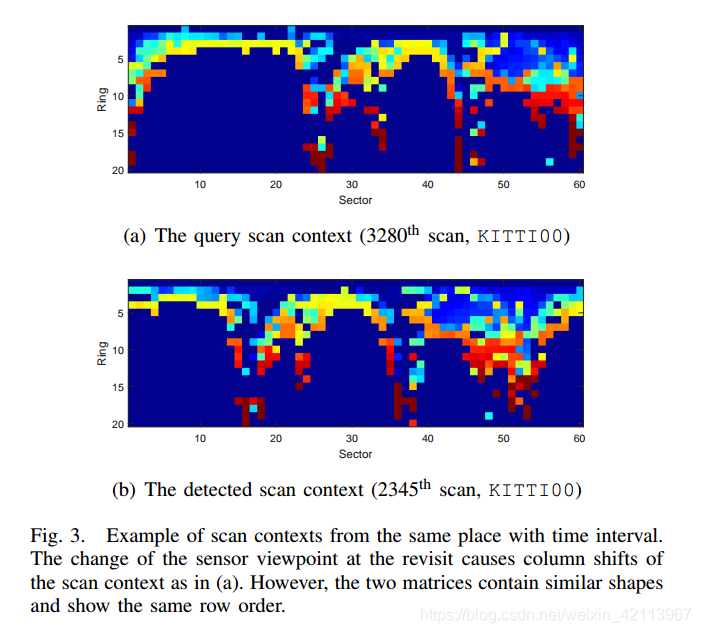
大師兄:恩,這是個好問題。假設咱們回到同一個地方,那有可能是沿著相反的方向回來的,那咱們的Viewpoint就發生了變化,這個Scan Context矩陣就會發生偏移!這樣就會導致Column順序發生變化。大師兄:所幸的是,只要location是在同一個地方,不管你的方向朝著哪里,至少row order不會發生太大變化。咱們只需要關心column shift這個問題。在文章中,上面大師兄和小紅薯對話中的問題,如下圖所示:
 。我們使用公式(7)進行最佳shift的選擇,找到最好的 n?后,用公式(6)進行distance計算。
。我們使用公式(7)進行最佳shift的選擇,找到最好的 n?后,用公式(6)進行distance計算。

3.3 Two-phase Search Algorithm
文中提到,有三種主流的Place Recognition的Search Algorithm:? Pairwise Similarity Scoring? Nearest Neighbor Search搜索? Sparse Optimization本文中采用了pairwise scoring和nearest search來實現有效的Hierarchical Search。(1) Ring Key
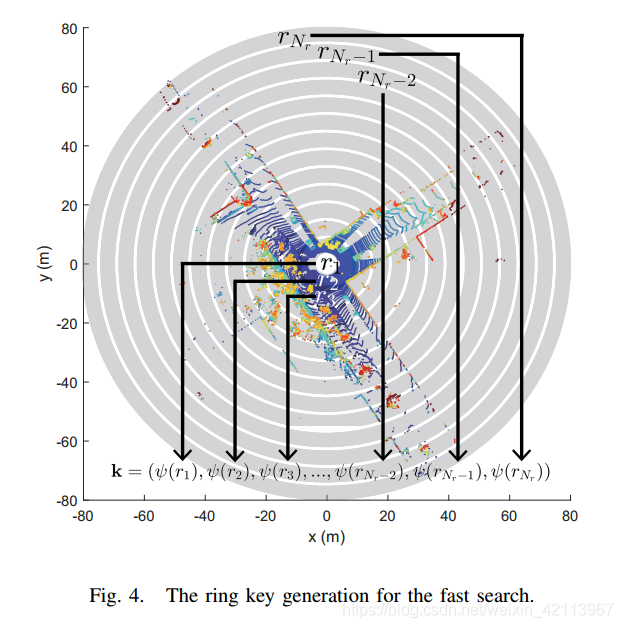
在3.2節中我們提到的公式(6)進行最短距離計算時,要先找到最佳旋轉n? ,計算量很大,所以在本文中提出了一種"Two-phase Search",并提出了Ring key這個Descriptor(描述子)來進行匹配搜索:Ring key is a rotation-invariant descriptor, which is extracted from a scan context. Each row of a scan context, r, is encoded into a single real value via ring encoding function . The first element of the vector k is from the nearest circle from a sensor, and following elements are from the next rings in order as illustrated in Fig. 4


(2) KD-Tree
? 在得到ring key向量 k 之后,文章用了 k 構建KD Tree。
? 用ring key of the query到這個KD Tree中搜索K個最相似的scan indexex(K是個heuristic number)
? 得到最相似的K個scan后,用上文中公式(6)進行Similarity Score計算.
? 滿足條件的最近的candidatec?這個位置被選為revisited place,也就是loop的地方:

4
Scan Context算法延伸
4.1 ICP Initial Value中的應用
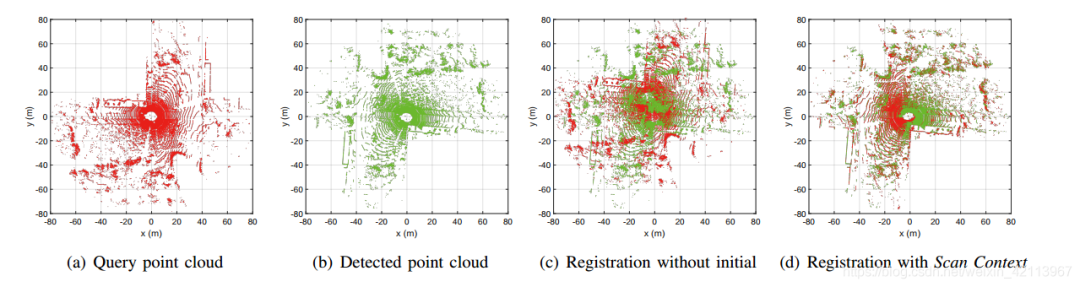
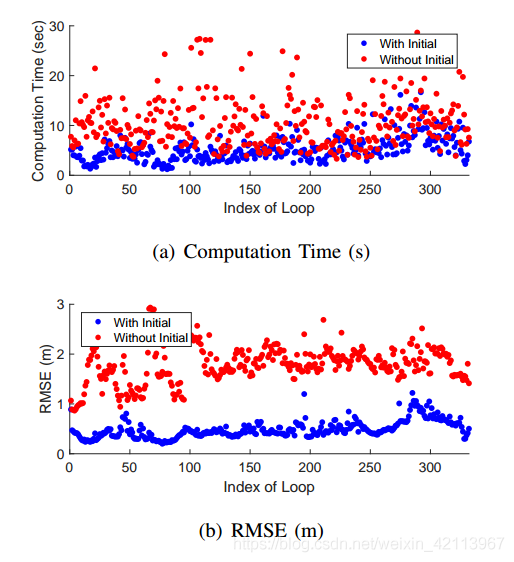
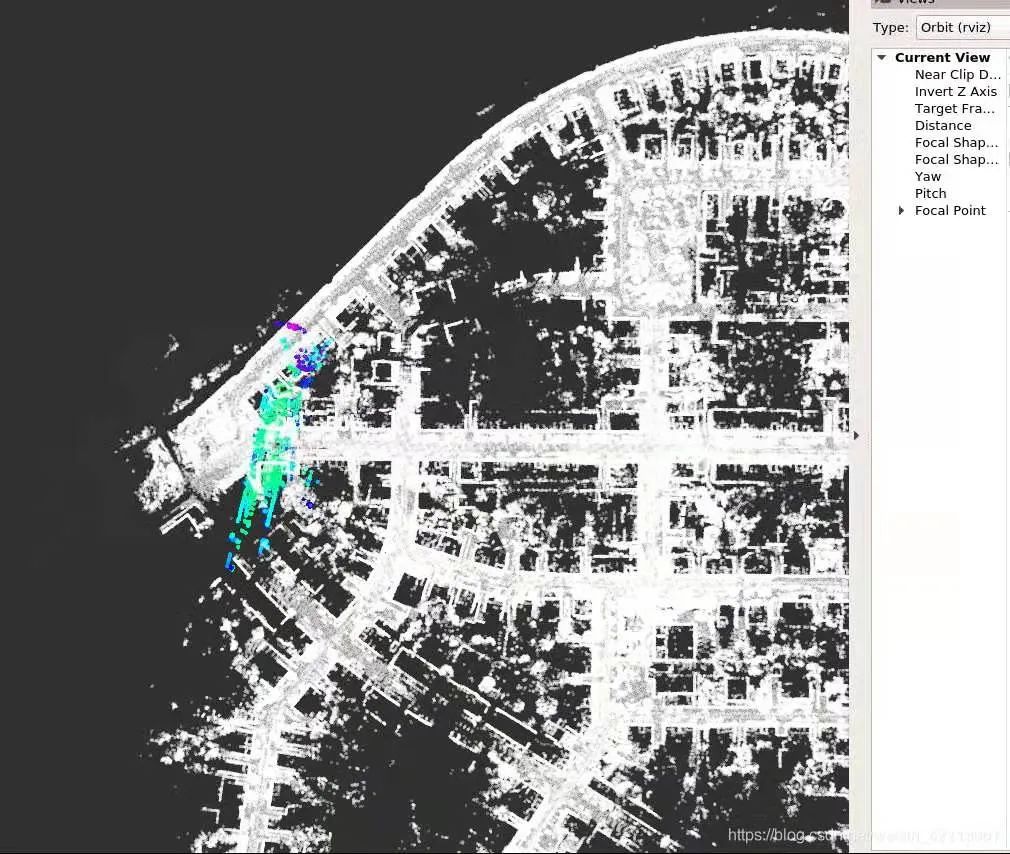
由上文3.2節的公式(7)需要找到一個n ? 旋轉,使得兩個點云之間的距離最小。這里其實也可以作為ICP的一個初始值,即predicted pose,來加快converge的過程。文章的Experiment部分對此進行了試驗,發現用Scan Context進行ICP初始化效果確實更好:
 如果加入ScanContext進行全局重定位,效果如下圖:
如果加入ScanContext進行全局重定位,效果如下圖: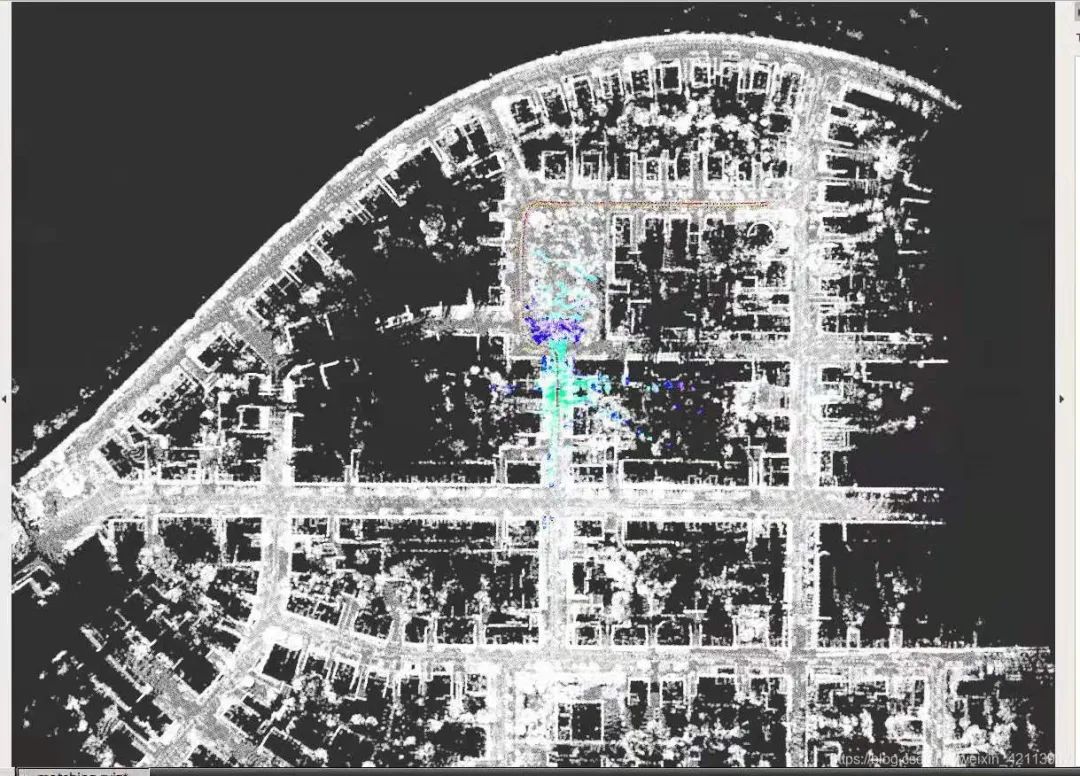 4.3Future Works在文章最后,作者提到可以使用更好的bin encoding function (eg., a bin’s segmantic information)來提升性能,目前咱們只是用了一個很簡單的max Z(p)來找Z軸高度上的最高點。對于有夢想的讀者,也期待你的貢獻!
審核編輯 :李倩
4.3Future Works在文章最后,作者提到可以使用更好的bin encoding function (eg., a bin’s segmantic information)來提升性能,目前咱們只是用了一個很簡單的max Z(p)來找Z軸高度上的最高點。對于有夢想的讀者,也期待你的貢獻!
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
算法
+關注
關注
23文章
4784瀏覽量
98076 -
SLAM
+關注
關注
24文章
457瀏覽量
33331
原文標題:ScanContext 論文詳解 - 用途:Lidar SLAM 回環檢測、空間描述符
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
飛凌嵌入式ElfBoard-文件I/O的了解探究之復制文件描述符
open返回得到的文件描述符fd可以進行復制,復制成功之后可以得到一個新的文件 描述符,使用新的文件描述符和舊的文件描述符都可以對文件進行IO操作,復制得到的文件
發表于 11-26 15:36
飛凌嵌入式ElfBoard-文件I/O的了解探究之文件描述符和FILE指針轉換
在同一個文件上執行I/O操作時,系統I/O與標準I/O可以混合使用,借助于庫函數 fdopen、fileno可以將文件描述符和FILE指針對象之間進行轉換。1.3.3.1 fileno用于將傳入
發表于 11-20 09:24
stm32103VB tinyusb 使用異常,無法識別:設備描述符請求失敗怎么解決?
從調試信息上看,有獲取設備描述符的指令執行
USBD Setup Received 80 06 00 01 00 00 40 00
Get Descriptor Device
Queue EP
發表于 10-14 08:00
STM32F7使用USB獲取設備描述符失敗怎么解決?
(設備描述符請求失敗)”:
配置界面:
用的是2019.12.17克隆下來的RTT源碼。程序能正常執行,LED在閃,就是USB無法識別
如果主函數中執行了“MX_USB_OTG_FS_PCD_Init()”函數的話,插USB就沒反應了,大神們教下這個USB該怎么移植?
發表于 09-29 06:40
STM32H7 ETH rx描述符不可用是怎么回事?
加入文件系統(掛載在qspi+w25q)后以太網上機會有一段時間ping異常后續正常,去掉這個文件系統以太網就上電正常了
手冊上說eth的dma是獨立的,但是看dma寄存器得知rx描述符無效,期間嘗試關閉cache,情況是不變的
下圖是正常的dma數據
大佬若有空,麻煩指點一下。
發表于 09-11 07:59
如何確定 M483 HSUSB 描述符?
我們使用M843SIDAE對于USB 2.0設備,時鐘和寄存器等的初始化是正確的,但是在與主機通信時,發生了錯誤:
“ USB 1-6:設備描述符讀取/64,錯誤 -71
USB 1-6:設備
發表于 08-28 06:46
STM32H747的USB無法連接到電腦,電腦提示“未知USB設備,(設備描述符請求失敗)”,怎么解決?
USB部分電路抄的 arduino GIGA RI WiFi。通過BOOT0拉高強制進入DFU 和 正常上電鏈接都不行,電腦顯示一致。“未知USB設備,(設備描述符請求失敗)”通過SWD 燒錄程序
發表于 07-11 08:24
STM32G0b1 USB device cdc顯示設備描述符請求失敗的原因?怎么解決?
程序里已經包含了USBD_Start(),如果USB外設自帶DP上拉、阻抗匹配的功能理論上應該是可以被VCP識別到的(驅動也裝了),但實際上顯示設備描述符請求失敗。
然后我懷疑是DP1.5K上拉電阻要
發表于 07-10 06:16
ART-PI H750-USB-MSC設備描述符異常的原因?怎么解決?
-驗證
2.CubeMX配置
2.1 時鐘配置
2.2 USB配置
2.3 中間件配置
2.4 堆棧配置
3.邏輯分析儀觀察
3.1 主機發送請求設備描述符的SETUP事務階段
發表于 06-19 06:52
通過 FX3 以 5200*3900 分辨率、15fps 的速度從我的 fpga 傳輸視頻數據流,但無法設置最小/最大比特率描述符值,怎么解決?
我正試圖通過 FX3 以 5200*3900 分辨率、15fps 的速度從我的 fpga 傳輸視頻數據流,但無法設置最小/最大比特率描述符值,因為描述符大小只有 32 位。
描述符的預期值應該是
發表于 05-23 06:35
將CY7C68013A連接到基板管理控制器 (BMC),讀取設備描述符時發生FX2超時錯誤怎么解決?
: 使用 ehci-platform 的新高速 USB 設備編號 4
[391.934969] usb 1-1:設備描述符讀取/8,錯誤-110
[397.134834] usb 1-1:設備描述符讀取
發表于 05-14 07:36
使用官方評估板STM32H563ZI進行USB虛擬串口開發,下載后電腦提示USB設備無法識別,設備描述符請求失敗怎么解決?
使用官方評估板STM32H563ZI進行USB虛擬串口開發,找到官方例程:Ux_Device_HID_CDC_ACM,屏蔽掉HID相關的配置和初始化代碼,下載后電腦提示USB設備無法識別,設備描述符請求失敗!求指教!!!
發表于 03-11 08:06



 工商網監
工商網監
評論