 一種自矢量電磁軟體機器人的新概念
一種自矢量電磁軟體機器人的新概念

受生物系統啟發的軟機器人具有卓越的靈活性、適應性和安全性,在搜索救援、野外探索、人機交互和生物醫學應用方面顯示出巨大潛力。軟材料和結構在理論上能賦予傳統剛性機器人難以企及的無限自由度和靈活性,然而實際實施中受限于驅動機理和結構設計,更豐富的變形和更靈巧的運動不可避免地需求更多數量的軟驅動器和龐大復雜的控制系統。盡管科學家們已經開發出了流體驅動、電驅動、磁驅動、光驅動等多種多樣的軟驅動器,但它們在軟體機器人系統中的集成水平和驅動能力仍然與生物系統相去甚遠。
近日,上海交通大學機械與動力工程學院張文明教授課團隊提出了一種自矢量電磁軟體機器人的新概念,構筑了完整的基于內嵌微流道彈性體和可重構液態金屬線圈的軟電磁驅動器實施方案,發展了基于洛倫茲力和矢量合成原理的高維度驅控的新方法,實現了軟電磁機器人中任意子域模塊的即時主動和可選擇性調控,解決了通過有限數量驅動器實現軟體機器人的高效可重編程高維變形和多模式運動及轉換的難題,為開發媲美自然界生物體的高靈活度和高集成度的軟體機器人系統提供了更多可能性。
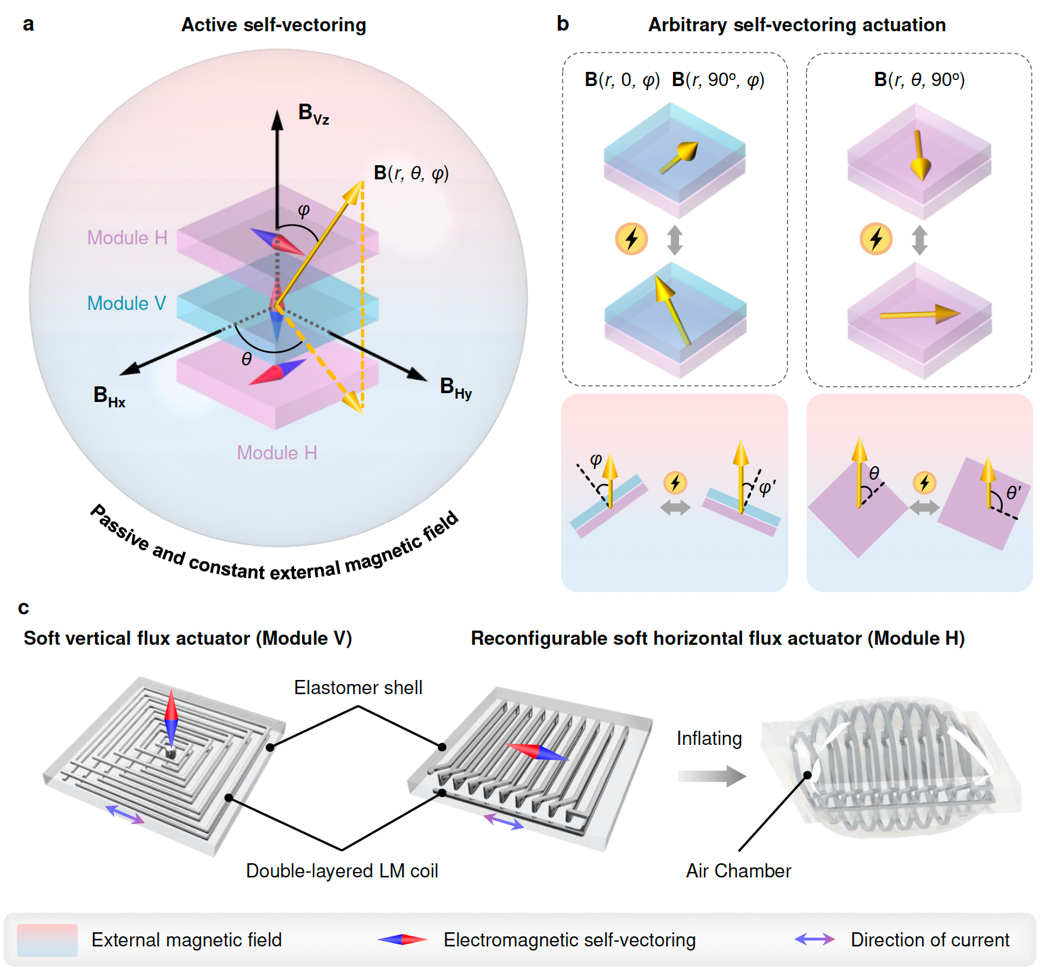
主動自矢量軟體電磁驅動模塊設計和靜磁場下的自矢量高維驅控原理
該工作以“Self-vectoring electromagnetic soft robots with high operational dimensionality”為題發表于Nature Communications期刊。同濟大學李汶柏研究員是第一作者和共同通訊作者,上海交通大學博士生陳虎越是共同第一作者,上海交通大學機械與動力工程學院張文明教授和密西根學院邵磊教授是共同通訊作者。
該“自矢量軟體機器人”利用嵌入的液態金屬制造出可重構的兩類典型的軟電磁線圈,即具有垂直電磁矢量的平面螺旋線圈和具有水平電磁矢量的三維可重構螺線管線圈,通過提出的不同重構策略將兩類基本模塊的復合疊加實現了三維空間內任意方向的矢量合成。模塊化的“自矢量機器人”通過簡單的電流控制即可實現即時高效的可重新編程、獨立的子域驅動和全方向的矢量操控,通過最少數量的驅動器展示了更高維度的變形和運動。“自矢量”策略將為人機交互、醫療應用、主動超材料等領域帶來新的啟發。
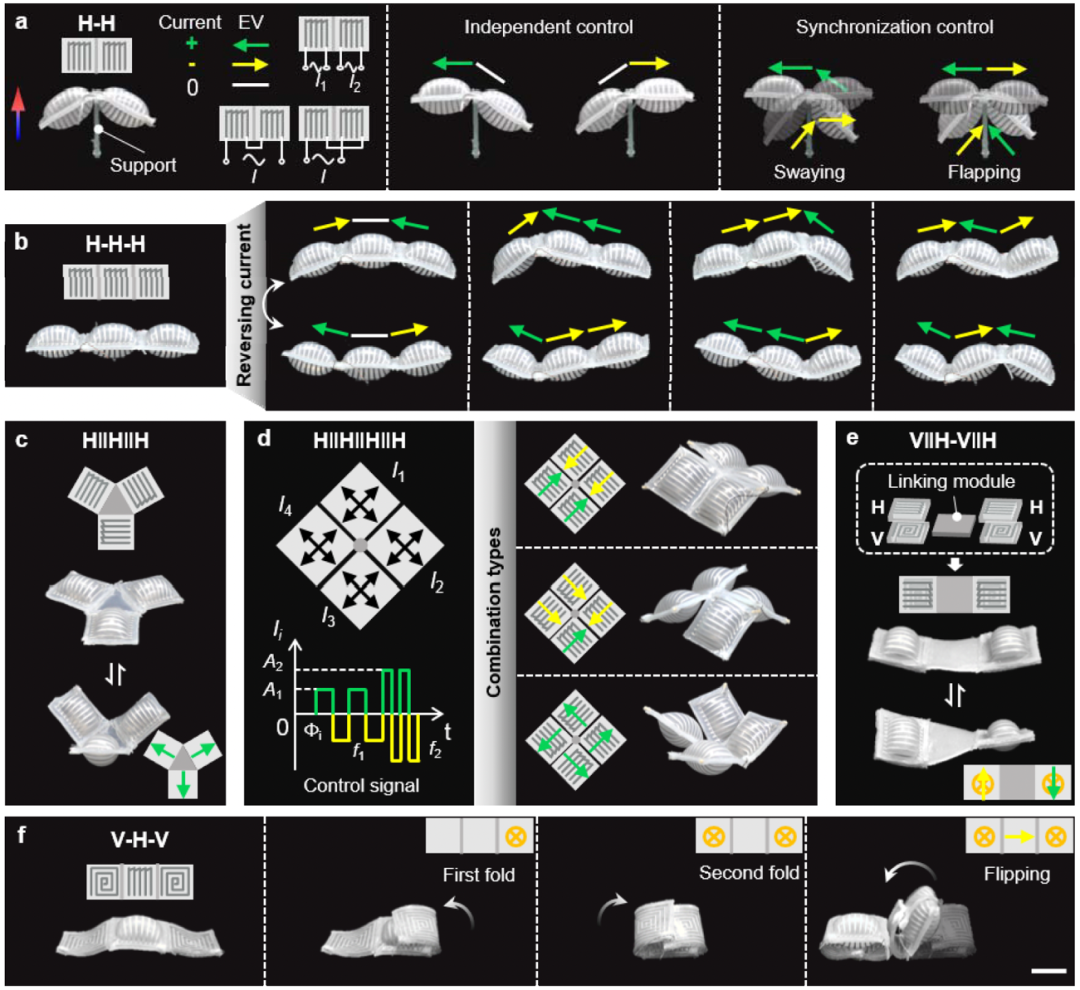
“自矢量”策略賦能的即時可重新編程變形
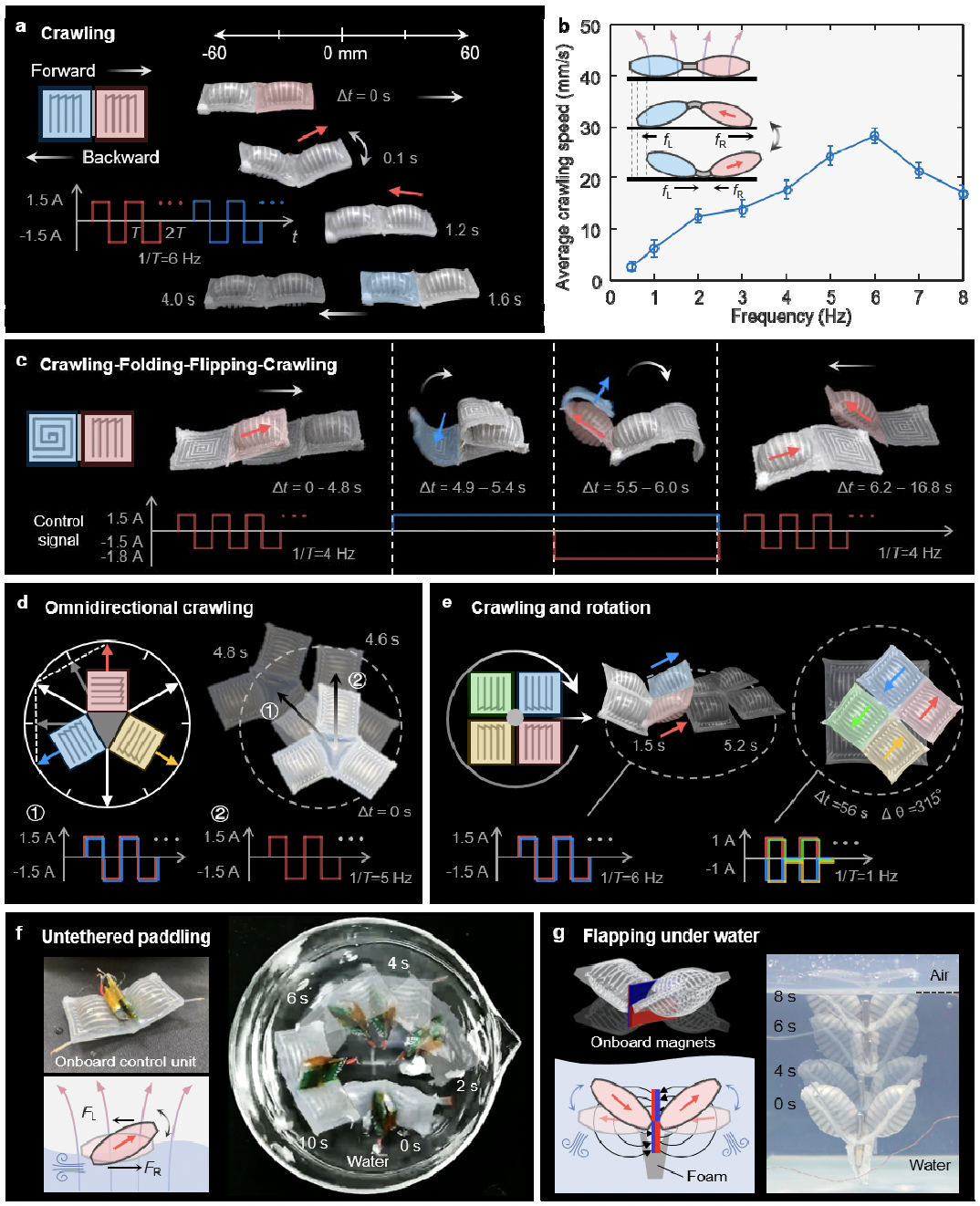
“自矢量”策略操控的水陸兩棲多模式運動
論文鏈接: https://doi.org/10.1038/s41467-023-35848-y
審核編輯 :李倩
-
模塊化
+關注
關注
0文章
356瀏覽量
22695 -
軟體機器人
+關注
關注
1文章
115瀏覽量
12126
原文標題:“自矢量”電磁軟體機器人,實現任意子域模塊的即時主動和可選擇性調控
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
高壓放大器在介電彈性體軟體機器人中的應用

軟智賦能,功放大有可為!Aigtek安泰電子亮相軟體機器人大會!

Aigtek安泰電子誠邀您蒞臨第十屆軟體機器人大會!

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
什么是機器人?追溯機器人技術的演變和未來

最新發布!泰科機器人發布首款自研雙足人形機器人

南京理工大學:研發柔性機械傳感器表界面微結構-面向軟體機器人
工業機器人的特點

工業機器人與協作機器人概念不同




 工商網監
工商網監
評論