") 詳解PMSM中常用的兩種坐標(biāo)變換
詳解PMSM中常用的兩種坐標(biāo)變換

前兩期介紹了Clarke的Park變化的基本原理,但是經(jīng)過這兩種變換后會(huì)存在兩種系數(shù),相信大家都很迷惑,這是什么原因? 主要原因是存在兩種遵循的方式:1、變換前后電流所產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)等效且電機(jī)輸出功率不變; 2、變換前后電流所合成的空間矢量等效且電機(jī)輸出功率不變。 這兩種最后方式是造成系數(shù)不同的根本原因,實(shí)際應(yīng)用中可以根據(jù)需要選擇相應(yīng)的變換等效原則。
關(guān)鍵詞:旋轉(zhuǎn)磁場(chǎng)等效; 空間矢量等效;
這一期設(shè)計(jì)的理論計(jì)算能力比較強(qiáng),強(qiáng)烈建議觀看的小伙伴找個(gè)安靜的角落,哪張紙和筆進(jìn)行計(jì)算!
01依據(jù)旋轉(zhuǎn)磁場(chǎng)等效變換
遵循的兩個(gè)原則:
a、變換前后電流所產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)等效;
b、變換前后兩系統(tǒng)的電機(jī)輸出功率不變;
1.1、Clarke變換
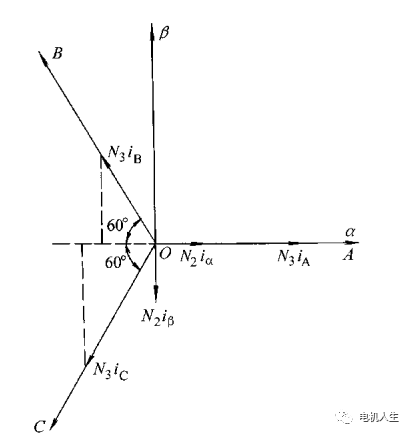
圖1-1是ABC和αβ兩個(gè)坐標(biāo)系,取α軸與A軸重合,并假定三相繞組每相有效線圈匝數(shù)為N3,兩相繞組每相有效線圈匝數(shù)為N2,兩種坐標(biāo)系中每相的磁動(dòng)勢(shì)均為有效線圈匝數(shù)與該相電流的乘積。
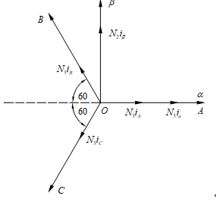
圖1-1 Clarke坐標(biāo)變換矢量示意圖1
由圖1-1得出磁勢(shì)守恒式子為:

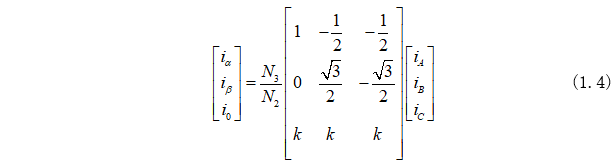
由式(1.1)變形化為矩陣形式為:

為了方便分析,引入零軸變量為:

將式(1.3)合并到式(1.2)可以得到αβ0軸坐標(biāo)系方程為:
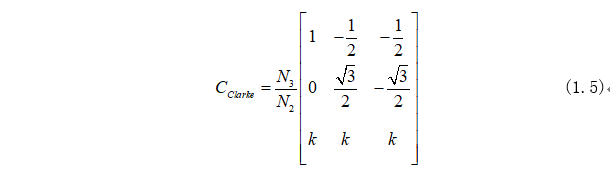
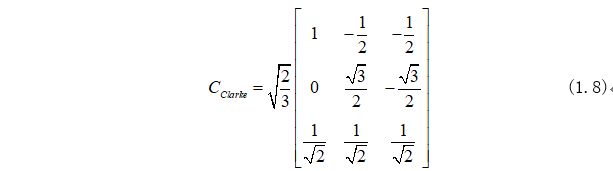
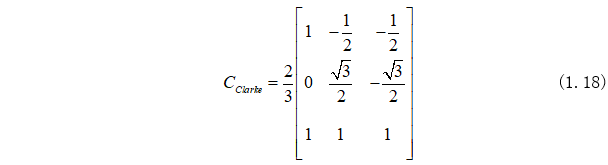
這里定義Clarke矩陣為:
坐標(biāo)變換中需要確保電機(jī)輸出功率不能發(fā)生變化,故功率計(jì)算表達(dá)式為:
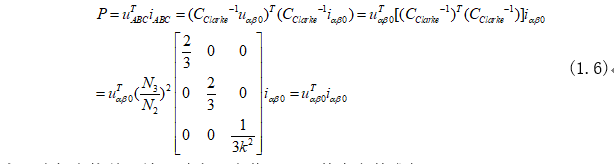
為了確保變換前后輸出功率不變化,可以其中參數(shù)求得:

因此Clarke變換式為:
1.2、Park變換
圖1-2是兩相旋轉(zhuǎn)坐標(biāo)系轉(zhuǎn)速w隨著電機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng),αβ是兩相靜止坐標(biāo)系,dq是兩相旋轉(zhuǎn)坐標(biāo)系。
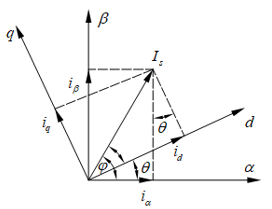
圖1-2 Park坐標(biāo)變換示意圖1
由第二期內(nèi)容可知,Park變換式為:

1.3、功率計(jì)算
電機(jī)功率可以計(jì)算為:

02依據(jù)空間矢量等效變換
遵循的兩個(gè)原則:
a、變換前后電流所合成的空間矢量等效;
b、變換前后兩系統(tǒng)的電機(jī)輸出功率不變;
2.1、Clarke變換
圖2-1中空間矢量Is在αβ軸上的投影分別為ia、iβ,且與A軸夾角為φ。
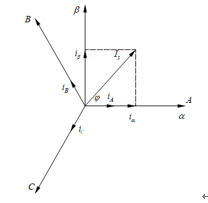
圖2-1 Clarke坐標(biāo)變換矢量示意圖2
根據(jù)圖2-1所示可以得到三相電流與空間矢量Is關(guān)系式為:

同理可以得到兩相靜止坐標(biāo)系中電流ia、iβ與空間矢量Is關(guān)系式為:

根據(jù)三角恒等式:

根據(jù)三角恒等式(1.13)將式(1.12)變化為:

寫成矩陣形式為:

同樣,引入零軸變量:

將式(1.16)代入式(1.15)中可以得到新的矩陣形式為:
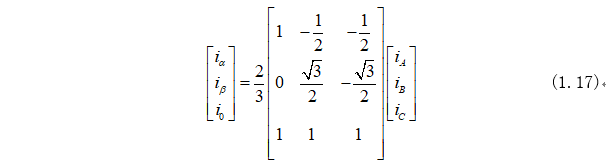
那么Clarke變換矩陣為:
2.2、Park變換
同樣,圖2-2是兩相旋轉(zhuǎn)坐標(biāo)系轉(zhuǎn)速w隨著電機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng),αβ是兩相靜止坐標(biāo)系,dq是兩相旋轉(zhuǎn)坐標(biāo)系。
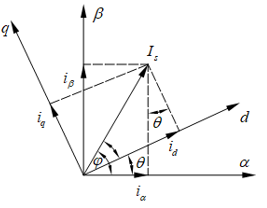
圖2-2 Park坐標(biāo)變換示意圖2
由第二期內(nèi)容可知,Park變換式為:

2.3、功率計(jì)算
電機(jī)功率可以計(jì)算為:

03總結(jié)
由磁動(dòng)勢(shì)守恒計(jì)算出的電機(jī)功率為:

由空間矢量守恒計(jì)算出的電機(jī)功率為:

兩種變換存在一個(gè)3/2的系數(shù)區(qū)別,主要是各自采用了不同的變換形式,最后得出的功率都是對(duì)的!
-
Park
+關(guān)注
關(guān)注
0文章
6瀏覽量
8214 -
PMSM
+關(guān)注
關(guān)注
14文章
255瀏覽量
43723 -
坐標(biāo)變換
+關(guān)注
關(guān)注
0文章
19瀏覽量
7050 -
CLARKE
+關(guān)注
關(guān)注
0文章
6瀏覽量
6891 -
park變換
+關(guān)注
關(guān)注
0文章
3瀏覽量
1376
發(fā)布評(píng)論請(qǐng)先 登錄
電力電子控制中常用坐標(biāo)變換的性質(zhì)及約束條件

simulink中pmsm的數(shù)學(xué)模型及坐標(biāo)變換總結(jié)
PMSM的基本數(shù)學(xué)模型和各個(gè)坐標(biāo)變換之間的關(guān)系
三相PMSM的坐標(biāo)變換
Pmsm在旋轉(zhuǎn)坐標(biāo)系的數(shù)學(xué)模型坐標(biāo)變換
兩種標(biāo)準(zhǔn)信號(hào)之間的函數(shù)變換
機(jī)器人運(yùn)動(dòng)控制的兩種模型
機(jī)器人運(yùn)動(dòng)控制的兩種模型
電源設(shè)備中常用的四種變換電路(續(xù))
單片機(jī)常用的兩種延時(shí)控制方式
工業(yè)機(jī)器人中常用的兩種軸承的詳解
永磁同步電機(jī)(PMSM)知識(shí)系列之坐標(biāo)變換

PMSM矢量控制坐標(biāo)變換之Clark變換



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論