 自主泊車,自動駕駛的點睛之筆
自主泊車,自動駕駛的點睛之筆

在商場的地下車庫中,你花費大量時間,終于找到一個停車位,停完車后,你便直接去進行約會,并未專門去記住停車位置,當約會結束后,你發現自己已經找不到自己的車了,這時你只能一個區域一個區域的尋找,此時此刻,你在想如果有一個可以在手機上點按之后,車輛可以自動停到預定位置的功能,那將會多么方便。
找車位難、停車難、尋車難等問題,一直是大家使用車輛過程中的一個痛點,很多車主都不愿意花費大量時間從事這些事情。懶惰,是科技進步的原動力。汽車主機廠的工程師們也發現了消費者對此功能的需求,于是自主泊車系統的想法應運而生,自主泊車可以為車主節省超過30%的駕駛時間,直擊痛點,還可以大幅度提升停車場的停車位的利用率。
之前與大家討論自動泊車系統,是雞肋?還是未來?中提到,自主泊車系統作為自動泊車的升級功能,承擔者解決消費者用車最后一公里找車位難,停車難的問題,也是實現自動駕駛落地必不可少的一項技術,自主泊車可以在不需要駕駛員的輔助下,自動完成尋找車位、自動停車、提前泊出等操作,自主泊車發展前景一片大好。
自主泊車技術介紹
自主泊車(AVP)又稱為代客泊車或一鍵泊車,駕駛員可以在指定下客點下車,通過手機AP下達泊車指令,車輛在接收到指令后可自動行駛到停車場的停車位,不需要用戶操縱與監控;駕駛員通過手機APP下達取車指令,車輛在接收到指令后可以從停車位自動行駛到指定上客點;若多輛車同時收到泊車指令,可實現多車動態的自動等待進入泊車位。車輛自動行駛過程中應能遵守道路交通規則,或停車場運營方所制定的場內交通規則。自主泊車主要包含尋位、泊車和喚車3部分內容。
尋位
自主泊車中的尋位,就是指駕駛員在手機上下達泊車指令后,車輛可以自主去尋找待停車位或無車輛停止車位,這其中就需要車輛可以自主完成駕駛過程,可以根據既定線路自動開到停車位。由于停車場地多處于封閉或半封閉場所,且停車場經常會出現駕駛員忽然竄出、車輛堵塞在行駛道的情況,因此車輛在尋位時,要可以隨時處理各種突發情況,可以及時減速、避讓甚至停車。這就要求車輛擁有足夠智能的感知及決策規劃系統,可以實現L3,甚至L4級別的自動駕駛功能。為使得車輛可以正確完成尋位過程,就需要在車輛上加裝毫米波雷達、激光雷達、車載攝像頭等感知硬件,可以對停車場環境進行隨時感知,此外還需要足夠智能的決策規劃系統,為讓車輛可以精準停泊到停車位,還需要讓停車場有高精度地圖覆蓋,從而讓車輛可以停泊到位。
泊車
自主泊車中的泊車則是自動泊車功能的具體體現,自動泊車過程主要有五大環節,即環境感知、停車位檢測和識別、泊車路徑規劃、泊車路徑跟隨、控制模擬顯示;根據自動泊車方式的不同,可以將自動泊車分為平行式泊車、垂直式泊車和斜列式泊車。
其中環境感知將決定自動泊車的精準度,通過車身安裝的超聲波雷達,讓待泊車輛可以對目標停車位周邊環境進行感知,可以確認目標停車位周邊是否有車輛、目標停車位具體的位置、車輛自身狀態等信息,是確保自動泊車過程安全可靠的第一步,可以讓待泊車車輛避免剮蹭。在使用超聲波傳感器探測車位時,車輛以一定的恒定車速V平行行駛向泊車位:
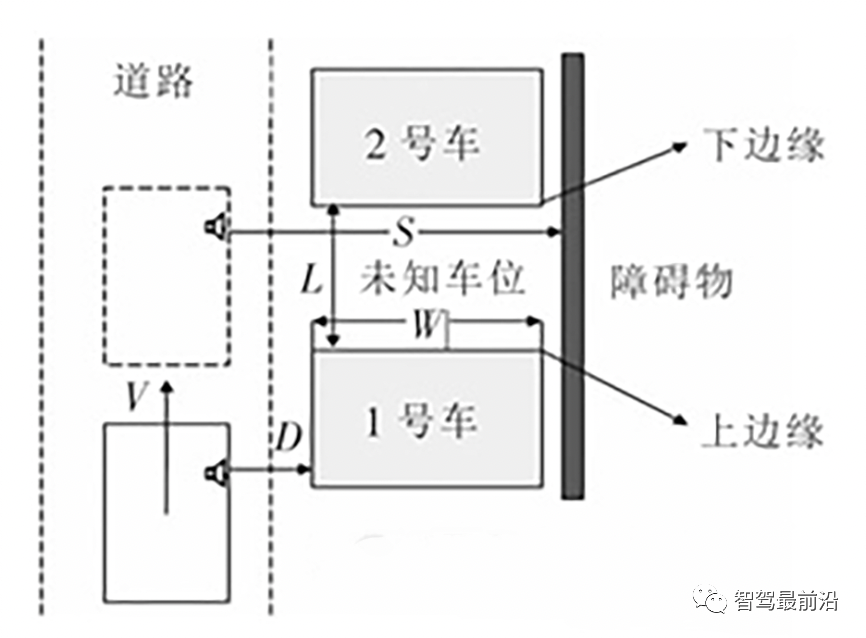
當車輛駛過1號車停放的位置時,裝在車身側面的超聲波傳感器開始測量車輛與1號車的橫向距離D。
當車輛通過1號車的上邊緣時,超聲波傳感器測量的數值會有一個跳變,記錄此時時刻。
車輛繼續勻速前進,當行駛在1號車與2號車之間時,處理器可以求得車位的平均寬度W。
當通過2號車下邊緣時,超聲波傳感器測量的數值又發生跳變,處理器記錄當前時刻,算得最終的車位長度L。
處理器對測量的車位長度L和寬度W進行分析,判斷車位是否符合泊車基本要求并判斷車位類型。
考慮到自動泊車實現原理,泊車路徑規劃一般盡可能滿足以下要求:
完成泊車路徑所需要的動作必須盡可能少。因為每個動作的精度誤差會傳遞到下一個動作,動作越多,精度越差。
在每個動作的實施過程中,車輛的轉向輪(絕大部分為前輪)的角度需要保持一致。因為系統是通過嵌入式系統實現的,而嵌入式系統的性能有限,轉向輪角度保持一致能夠將運動軌跡的計算歸結為幾何問題,反之需要涉及復雜的積分問題,這對嵌入式系統的性能是一個挑戰。
自主泊車中的泊車環節還需要車輛在停入車位后可以完成自動熄火、掛P檔、鎖車門等一系列,這是在自動泊車環節上技術的提升。
喚車
自主泊車相較于自動泊車,主要是多了尋位和喚車的功能,喚車功能的實現可以讓駕駛員在忘記車輛停車位置之后,不用盲目尋找,只需要在手機上點按喚車功能,車輛便可以自動從停車位置駛出,自動停泊在目標位置。與尋位功能類似的是,喚車功能在執行后,也需要避免碰撞,可以處理各種突發情況。
自主泊車系統有偏車端方案、偏場端方案、車端場端方案3種。對于偏車端方案中,主要是依靠車輛自身感知、決策技術,實現對停車場環境的精準感知及路徑規劃,偏車端方案對單車智能技術要求較高,但如果可以實現偏車端方案的自主泊車,就可以讓車輛在進行自主泊車時,沒有場地限制,該方案更符合我們對于自主泊車的期待。偏場端的自主泊車,則是通過對停車場基礎設置進行改造,可以讓停入停車場的車輛實現與停車場各設施之間完成信息交互,通過智能網聯技術,讓車輛得以正確停入停車位。偏場端的方案對單車智能技術要求不高,主要是通過對停車場技術設施的改造,完成自主泊車,但該方案由于改造成本和標準無法預估,因此實現的可能性更低。
自主泊車發展現狀
隨著汽車智能化的提升,越來越多高級輔助駕駛系統可以深度參與到人類駕駛過程中來,越來越多車主,也對高級輔助駕駛系統的依賴性越來越高,自主泊車作為可以解決駕駛員用車“最后一公里”難題的功能,因此自主泊車是非常具有商業化價值的。目前特斯拉、小鵬、極狐等新勢力造車企業,已經開始面向消費者提供自主泊車功能,但由于技術限制,現階段自主泊車功能并未達到我們所設想的能力,依然存在諸如使用場地存在限制、功能存在閹割等現象。
自主泊車作為智能汽車發展中尤為重要的一項功能,擁有統一一致的技術標準尤為重要,此前大部分車企和自動駕駛軟件提供商提出的自動泊車解決方案的標準和接口并不統一,無法讓自主泊車實現大規模落地和推廣,為此由中國汽車工程學會、中國通信工業協會起草的《自主代客泊車總體技術要求》于2020年11月26日起正式實施(微信公眾號后臺回復“自主泊車”,即可領取:《自主代客泊車系統總體技術要求》(征求意見稿)!)。
《自主代客泊車總體技術要求》對自主泊車功能提出了具體要求,規定了自主泊車系統定義、典型架構、類型劃分、應用場景、總體技術規范以及測試要求等內容,使得不同品牌車輛、不同方案、不同類型停車場、都可以實現自主泊車功能的落地。
自主泊車發展趨勢
自主泊車作為自動駕駛技術落地的關鍵一環,起著點睛之筆的作用,但現階段,自主泊車系統在功能上并未完善,由于對感知硬件和決策軟件的高要求,在技術實現上依舊有很長一段路要走。未來自主泊車將作為與消費者接觸頻次最高的一項技術被大家使用,如在用車前通過點擊手機可以讓車輛提前到達預定位置,在到達目的地后,可以通過點按手機讓車輛自動停到車位。自主泊車,將會在自動駕駛普及之前被大家普遍使用,真正解決駕駛員停車難的問題。
審核編輯黃昊宇
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791383 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179911 -
汽車
+關注
關注
15文章
4154瀏覽量
41101
發布評論請先 登錄
如何構建適合自動駕駛的世界模型?

自動駕駛汽車如何實現自動駕駛

如何設計好自動駕駛ODD?


從開發板到工業核心:迅為RK3576的金屬外殼,為何是行業應用的“點睛之筆”?

不同等級的自動駕駛技術要求上有何不同?
端到端自動駕駛相較傳統自動駕駛到底有何提升?

如何確保自動駕駛汽車感知的準確性?

自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD




 工商網監
工商網監
評論