") 一徑科技基于NVIDIA Isaac Sim仿真平臺賦能工業(yè)感知強大工具
一徑科技基于NVIDIA Isaac Sim仿真平臺賦能工業(yè)感知強大工具

一徑科技在CES2023上宣布基于NVIDIA IsaacSim仿真平臺,打造為高性能激光雷達模擬更多的應(yīng)用場景、全適應(yīng)測試要求,賦能驗證工業(yè)感知解決方案的強大工具。 Isaac Sim是NVIDIA基于NVIDIA Omniverse 平臺而構(gòu)建,該系統(tǒng)立足于工業(yè)機器人開發(fā),它是一個機器人模擬應(yīng)用與合成數(shù)據(jù)生成工具。機器人專家可使用它更高效地訓(xùn)練和測試機器人,模擬機器人與指定環(huán)境的真實互動,驗證不同場景下的性能,而且這些環(huán)境可以超越現(xiàn)實世界。通過Isaac Sim,各家公司極大降低了開發(fā)、測試以及數(shù)據(jù)獲取成本,加快了商業(yè)部署的上市時間。
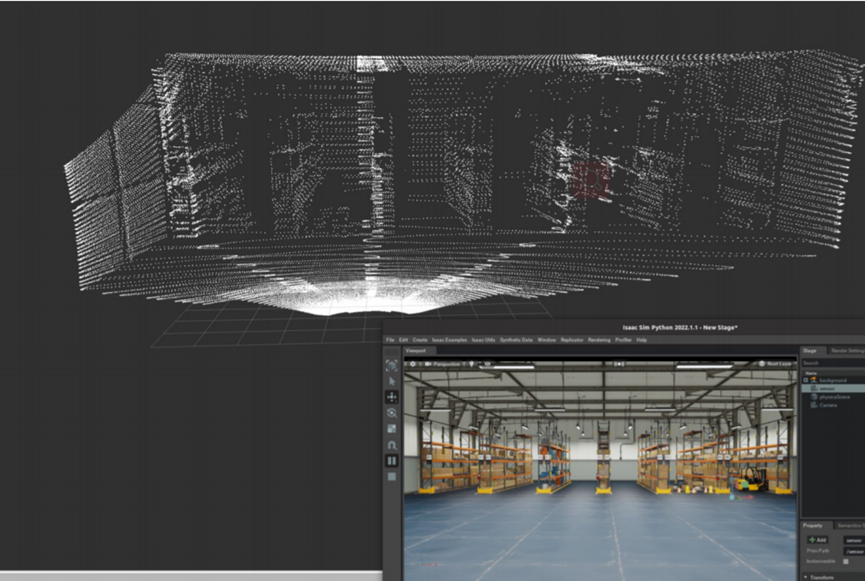
Isaac Sim模擬很多特定場景及應(yīng)用環(huán)境,可以利用其精確的基于物理的渲染再現(xiàn)多種形狀和大小的障礙物,形成完成的具備功能的場景,可以根據(jù)特定場景中的復(fù)雜性、不確定性來驗證激光雷達的性能狀態(tài)和技術(shù)能力。憑借數(shù)字孿生,以及NVIDIA Isaac Sim中的各種環(huán)境和不同使用條件,機器人領(lǐng)域開發(fā)人員可以根據(jù)復(fù)雜邊緣情況的解決方案,確定哪些性能模式更適合所選應(yīng)用。 Isaac Sim作為NVIDIA核心的機器人仿真平臺,優(yōu)勢在于機器人系統(tǒng)和算法的開發(fā)、測試以及評估都可以在仿真環(huán)境中實現(xiàn),同時為使用者提供以下工具:
模擬機器人動力學(xué)測試控制算法;
模擬機器人傳感器生成真實感相機、深度和分割圖像、LiDAR感知、IMU;
模擬不同環(huán)境和條件場景下的測試算法;
提供隨機對象和屬性的訓(xùn)練集。
一徑科技的產(chǎn)品為MEMS激光雷達,包含有ML-30s+短距激光雷達以及ML-Xs 前向長距MEMS激光雷達。 其中ML-30s+短距激光雷達具有超大視場角覆蓋:140°X70°(固態(tài)激光雷達品類最大視場角),測距為25m@R=10%,更好地對近距離區(qū)域?qū)崿F(xiàn)補盲。同時角分辨率0.44°*0.44°可以獲取更高質(zhì)的像素級點云,幫助機器人更好的看清周邊物體,140°超過普遍的 120°不僅可以覆蓋更大的區(qū)域,而且可以在不進行航向角調(diào)整的情況下能夠更快、更早的感知對應(yīng)邊緣區(qū)域的目標物;同時70°的垂直視場角按照水平以上20°,水平以下50°布置,從而更好地識別定位盲區(qū)物體。 另外,ML-Xs作為性能出眾的MEMS長距激光雷達,采用1550nm波長激光,有效測距達到250米,F(xiàn)OV 120°*25°,超長的測距能力更好地識別前向的障礙物,精準覆蓋更遠的區(qū)域。因此,在 Isaac Sim 模擬軟件定義的ML系列激光雷達模型性能特性之下,工業(yè)感知的開發(fā)將得到進一步加強。
作為 NVIDIA Jetson 生態(tài)伙伴的一員,一徑科技將繼續(xù)深化 NVIDIA Isaac Sim 仿真平臺合作,全面提升機器人綜合感知能力,打造推出高性能激光雷達解決方案。
審核編輯 :李倩
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222271 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5594瀏覽量
109749 -
一徑科技
+關(guān)注
關(guān)注
0文章
24瀏覽量
3954
原文標題:一徑科技基于NVIDIA Isaac Sim仿真平臺賦能工業(yè)感知強大工具
文章出處:【微信號:ZVISION_BJ,微信公眾號:一徑科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
一徑科技激光雷達賦能硅行智能零籠系列巡檢無人機
借助NVIDIA Isaac Sim與World Labs Marble加速機器人仿真環(huán)境構(gòu)建
僅使用智能手機在NVIDIA Isaac Sim中重建場景
NVIDIA Isaac Lab多GPU多節(jié)點訓(xùn)練指南

NVIDIA Isaac Sim仿真平臺助力他山科技實現(xiàn)觸覺傳感技術(shù)突破
NVIDIA Jetson + Isaac SDK 在人形機器人領(lǐng)域的方案詳解
NVIDIA助力構(gòu)建人形機器人全身遙操作仿真平臺
NVIDIA Isaac Lab可用環(huán)境與強化學(xué)習(xí)腳本使用指南

NVIDIA Isaac Sim和Isaac Lab現(xiàn)已推出早期開發(fā)者預(yù)覽版
正式上線:MotoSim智能電機仿真平臺

NVIDIA Isaac Sim 4.5.0與lsaac Lab 2.0的安裝教程

NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
NVIDIA技術(shù)驅(qū)動帕西尼觸覺感知與人形機器人智能突破
NVIDIA Isaac 是英偉達推出的綜合性機器人開發(fā)平臺
智元機器人基于NVIDIA Isaac GR00T打造高效仿真數(shù)據(jù)采集方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論