") 機器視覺焊道質(zhì)量檢測
機器視覺焊道質(zhì)量檢測

機器視覺焊道質(zhì)量檢測
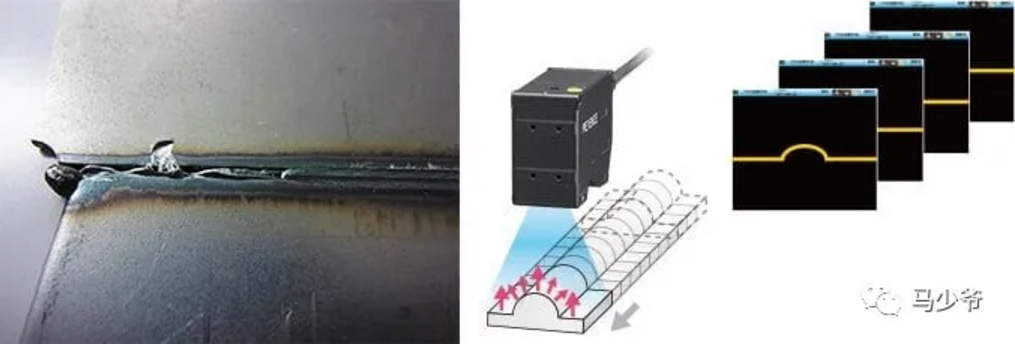
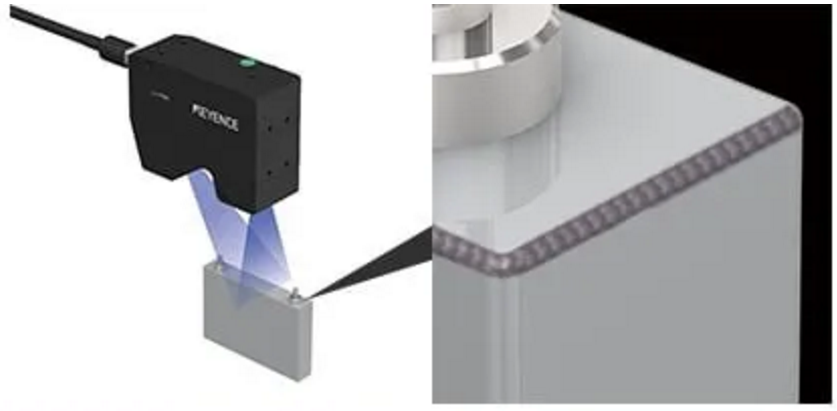
利用激光位移傳感器進行焊接后的焊道外觀形狀(咬邊、搭疊、余高不夠等表面缺陷)。
1、激光焊道的2D截面形狀檢測
在焊接的后續(xù)工序中,目視進行全數(shù)檢測時,不僅非常費時,同時也很難確保技能出眾且有經(jīng)驗的檢測員,可能會遺漏一些細微缺陷,出現(xiàn)人為失誤,這是一個非常嚴峻的問題。此外,在使用視覺系統(tǒng)或傳統(tǒng)紅色激光位移傳感器進行的焊接檢測中,會因焊接焊炬的光或工件的漫反射光而發(fā)生誤檢測。
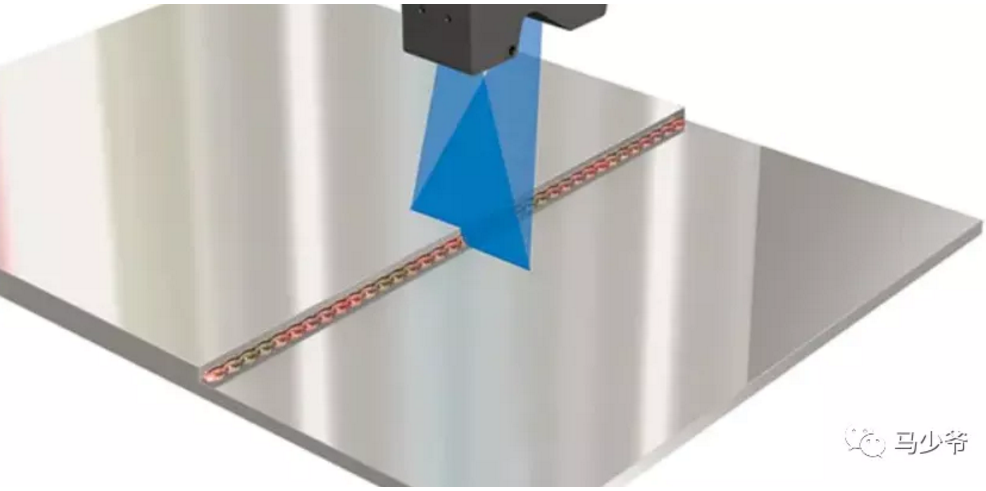
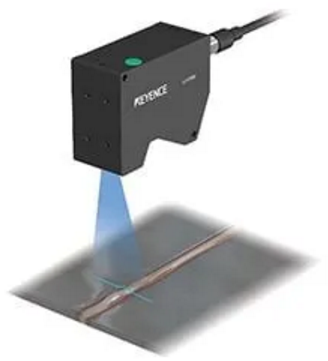
利用激光視覺傳感器進行高速且穩(wěn)定的截面形狀檢測
例如,在拼焊(TB)的激光焊接工序中導入激光視覺傳感器,可在不增加單件作業(yè)時間的前提下,追蹤機器人的焊炬,在焊接后立即穩(wěn)定地對焊道進行形狀檢測。利用最快64 kHz采樣,即使在自動焊接時掃描頭隨焊炬快速并行移動,也可實現(xiàn)穩(wěn)定的形狀檢測,可立即檢測出焊接缺陷,將發(fā)生不良焊接的可能性降到最低。
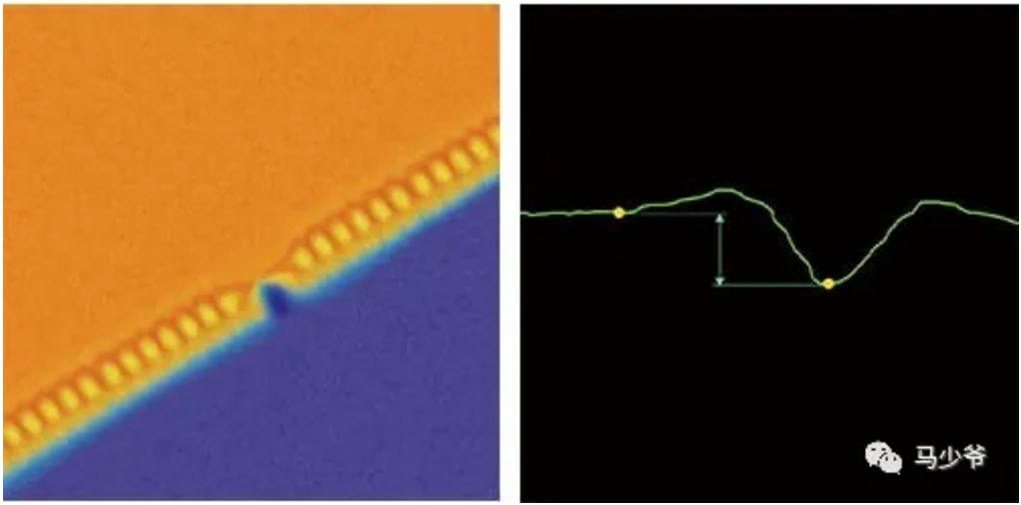
不同采樣速度下形狀檢測的比較
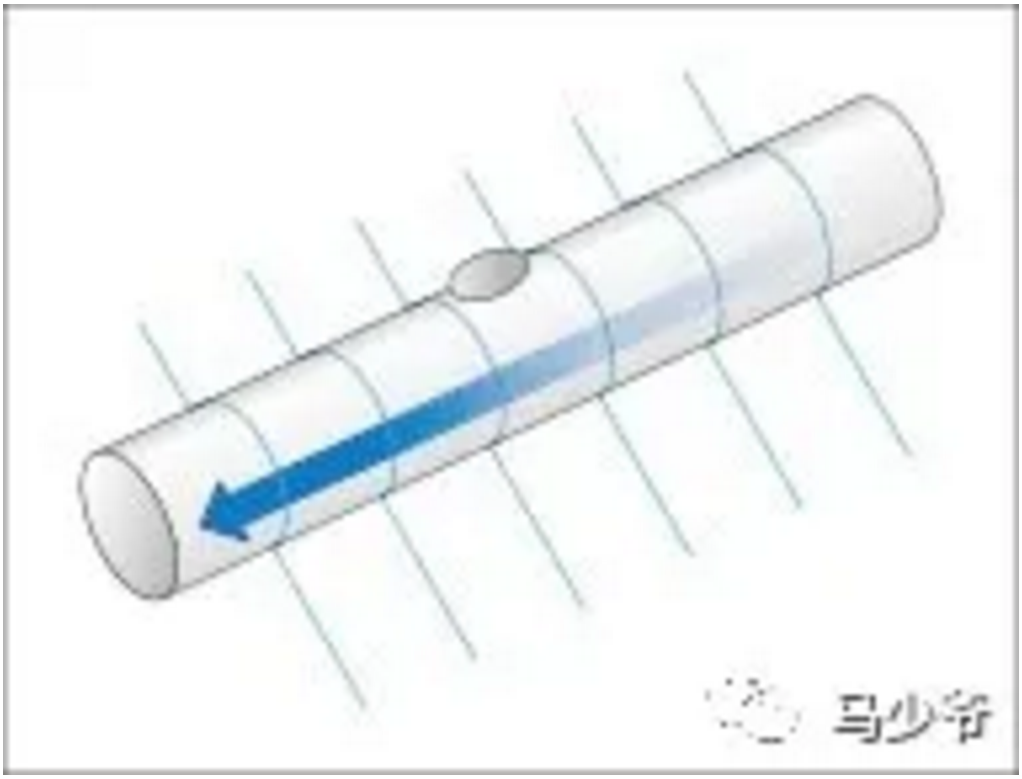
檢測節(jié)距大,容易忽略突起部。
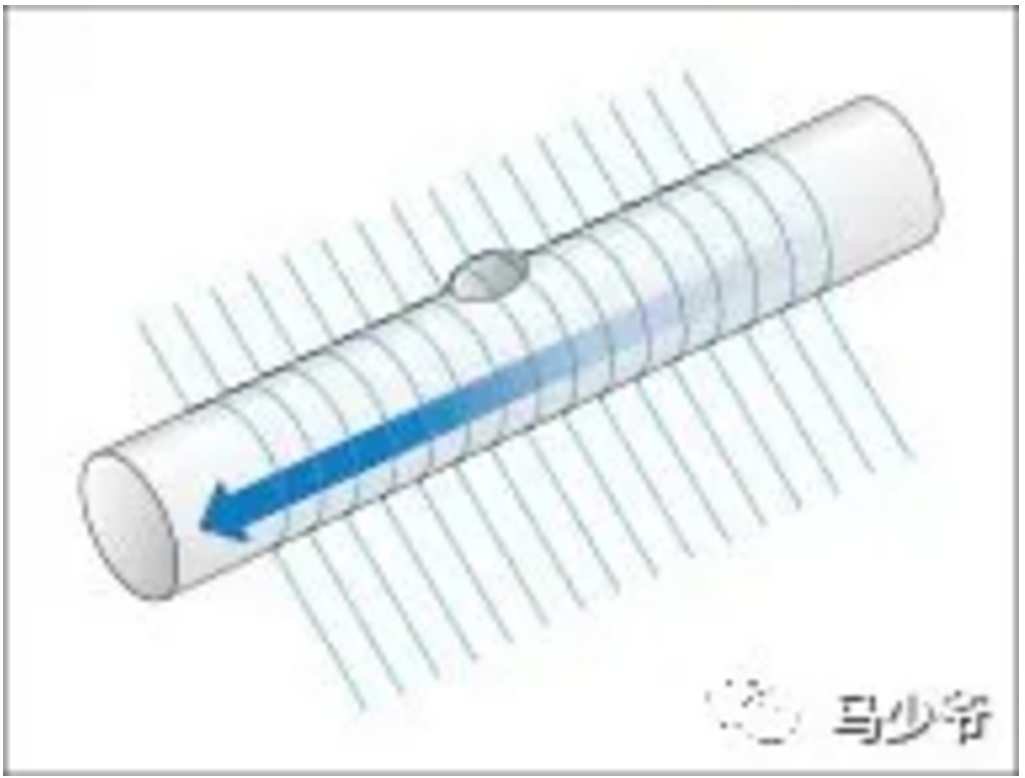
利用高速采樣的細微節(jié)距,不放過突起部。
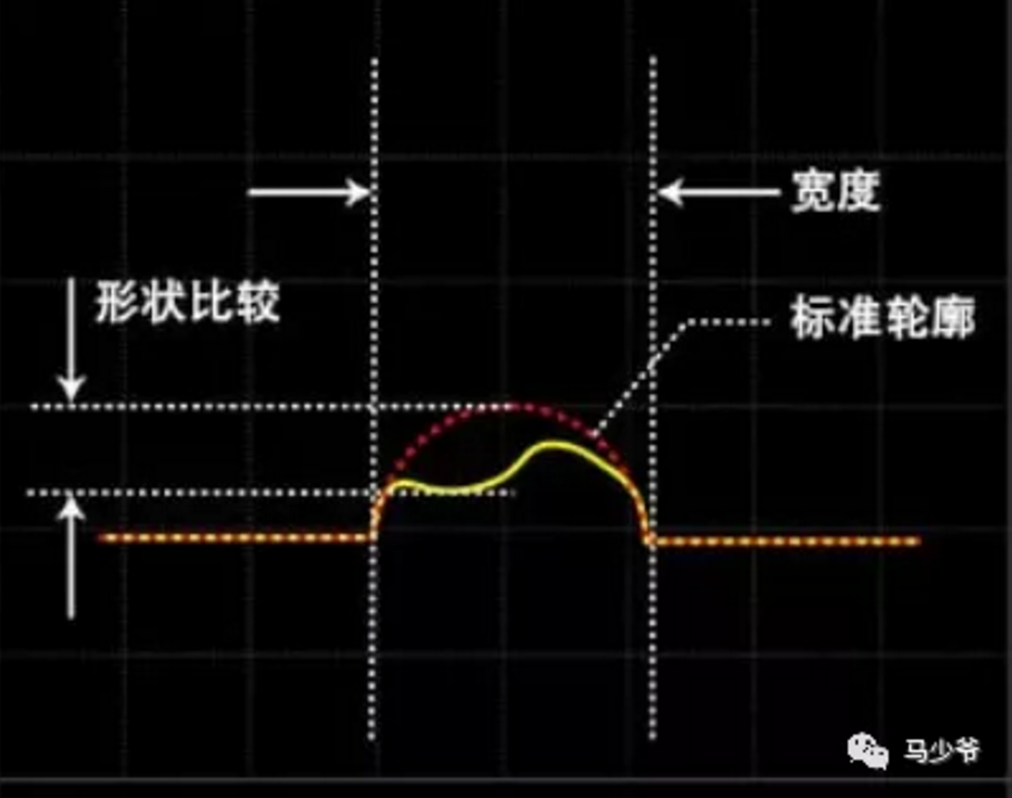
可指定16種測量內(nèi)容和11種測量對象,共配備74種測量模式。利用豐富的測量模式,可對各種工件的焊接部、焊接焊縫進行形狀檢測。
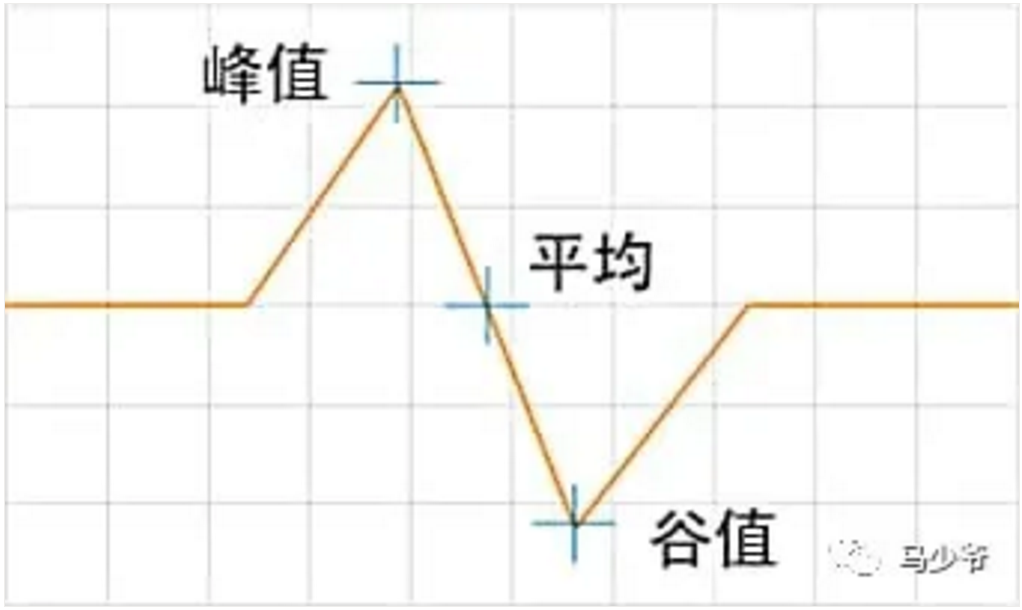
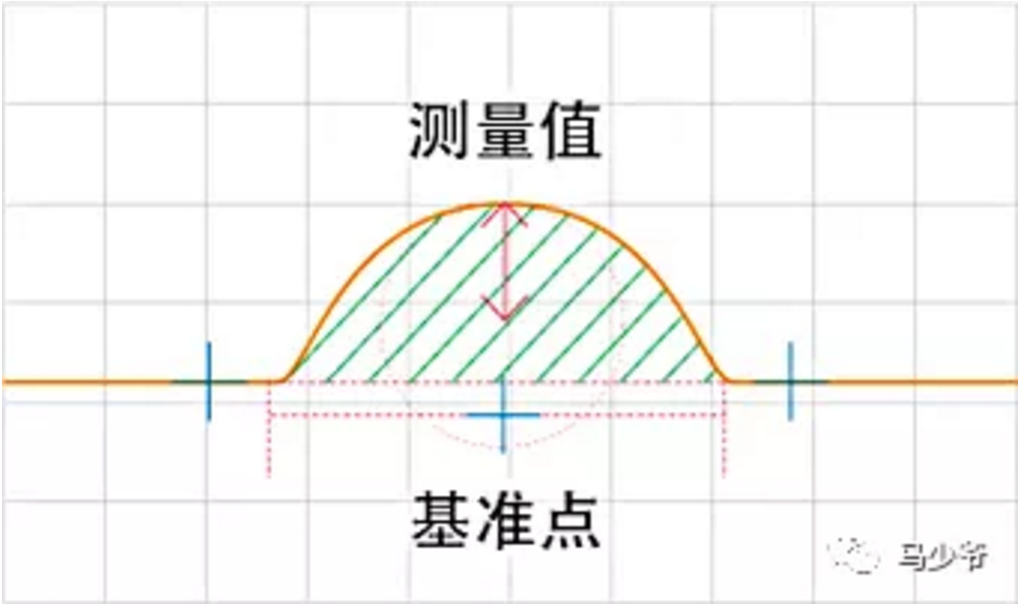
測量指定范圍內(nèi)的高度
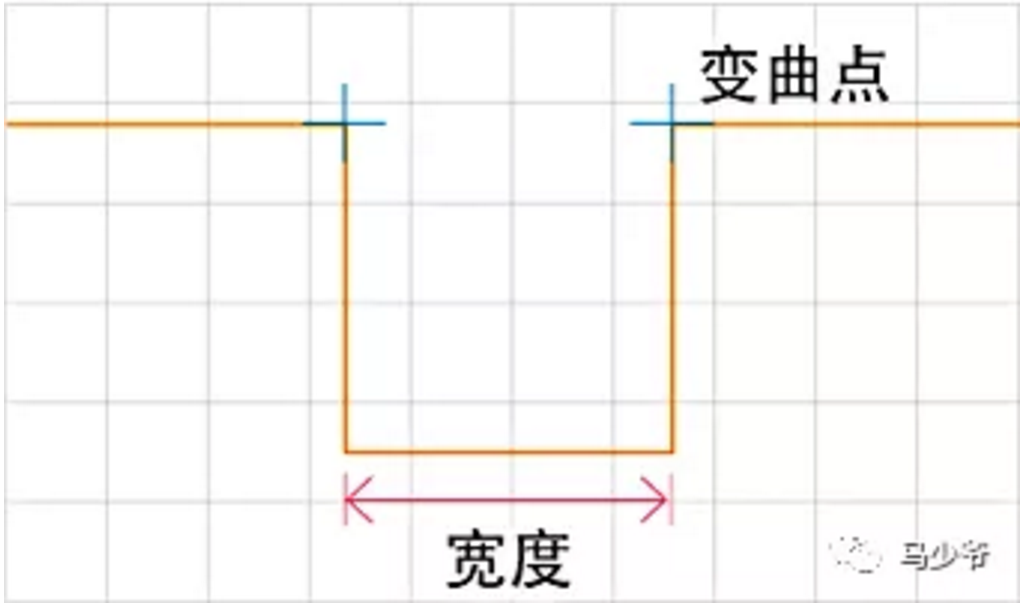
根據(jù)指定條件,測量寬度和位置
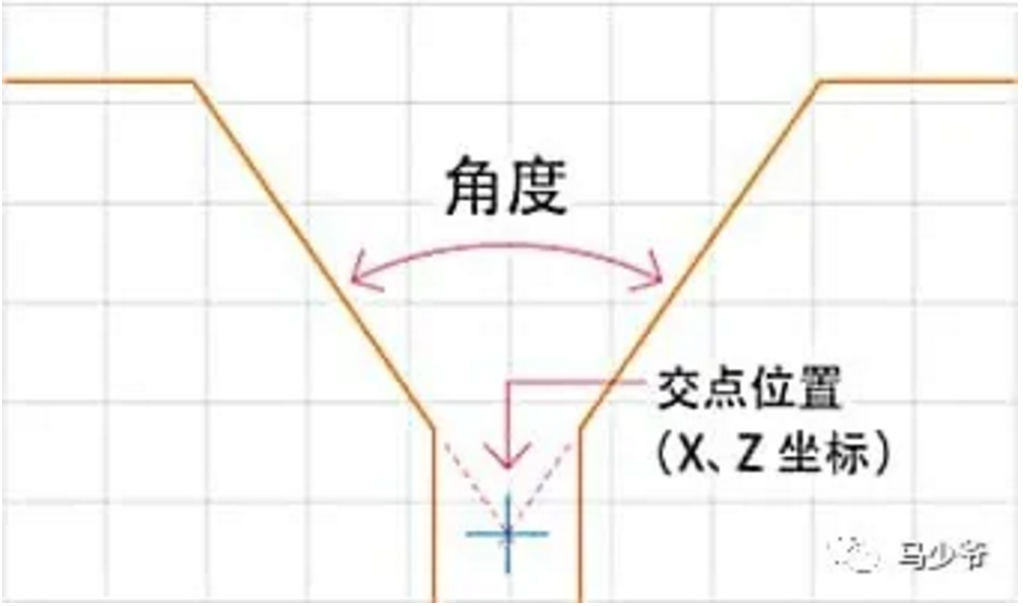
測量所檢測的直線角度和交點位置
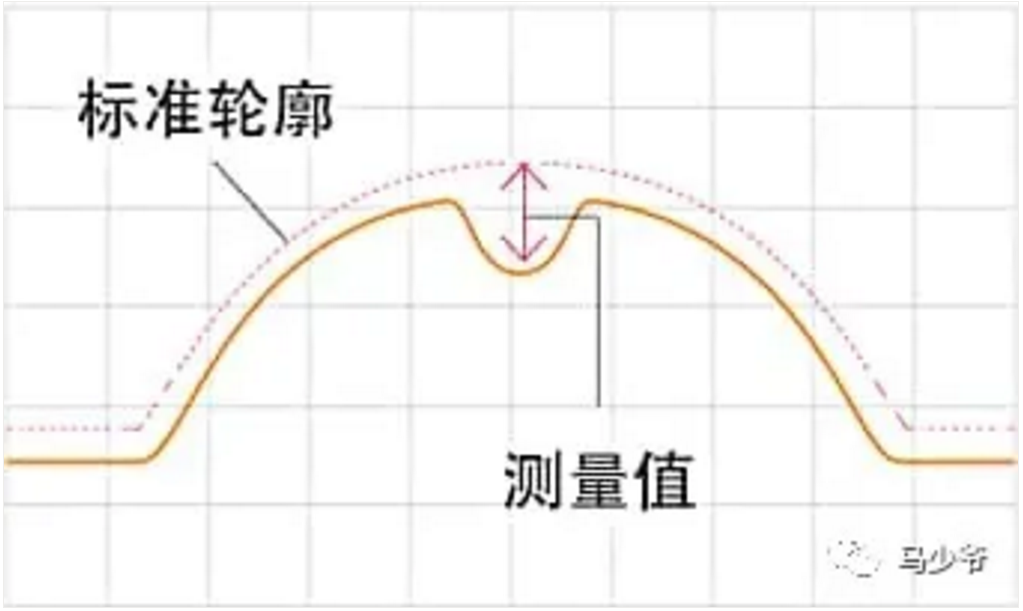
與注冊的標準輪廓相比,測量高度差最大的部分
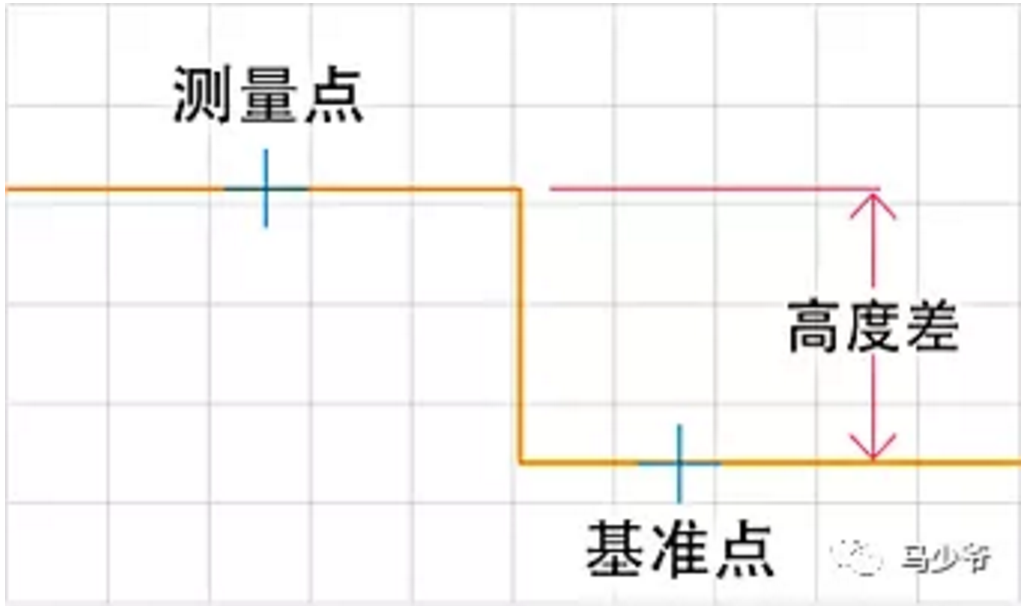
測量參考點與測量點的高度差
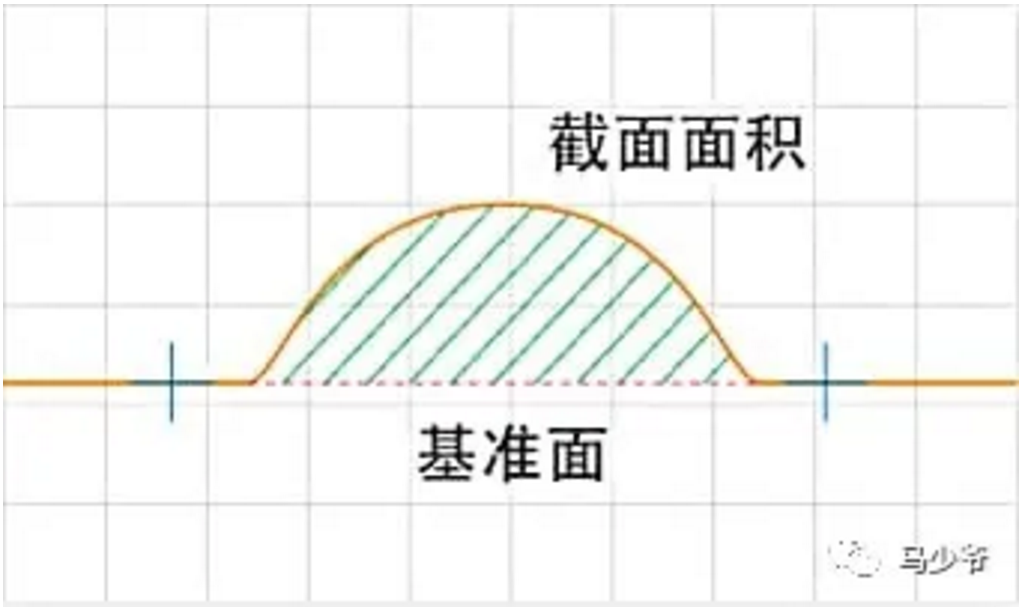
測量距參考面的截面面積
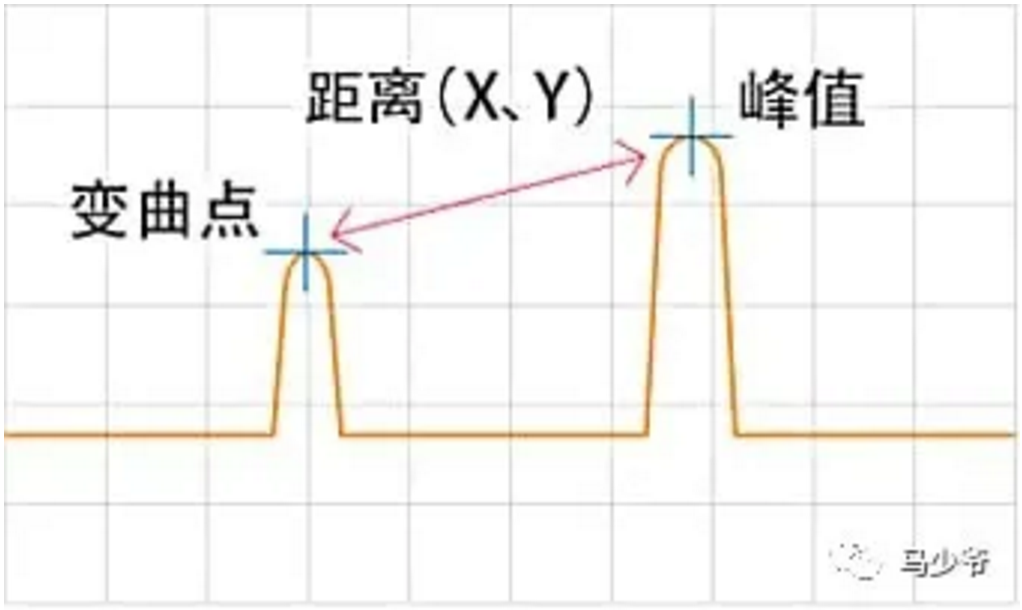
測量2點間的距離
測量曲線形狀的半徑或指定點的中心位置坐標
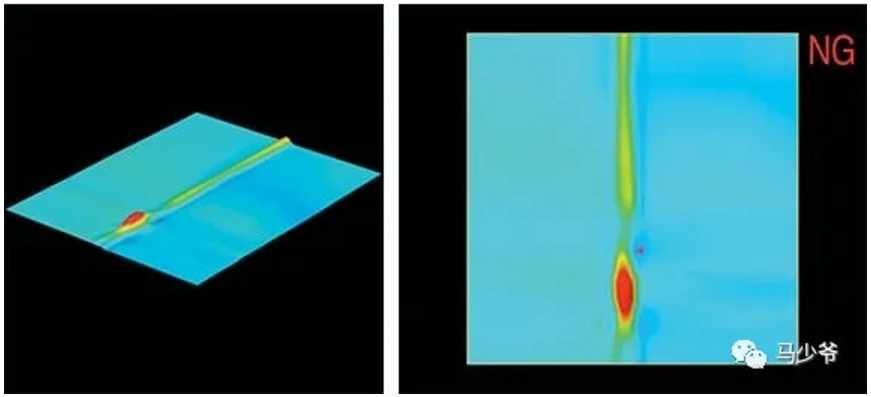
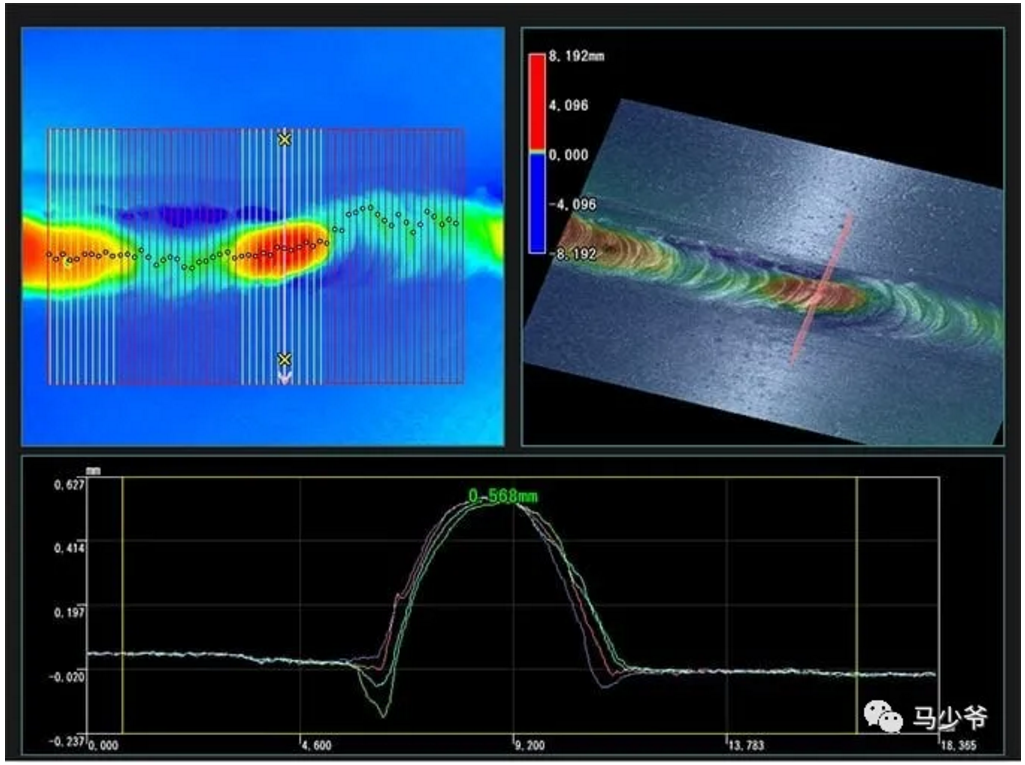
2、焊道的3D形狀檢測
在3D形狀檢測中,可對更多形狀的焊接部進行檢測,如僅憑2D截面形狀數(shù)據(jù)無法檢測出來的凹痕、咬邊的容積、搭疊的體積、焊道表面的開裂、焊道彎曲(焊道歪斜、焊道錯位)、焊道長度不良(坡口殘留等)或電弧擦傷、濺射等。
利用視覺系統(tǒng)進行的3D形狀檢測
利用超高速輪廓測量儀檢測到的2D截面形狀數(shù)據(jù),生成3D形狀并進行分析,實現(xiàn)精密的形狀檢測。
獲取焊道的2D截面形狀數(shù)據(jù)

使用最大16284的截面形狀數(shù)據(jù),通過視覺系統(tǒng)生成3D形狀
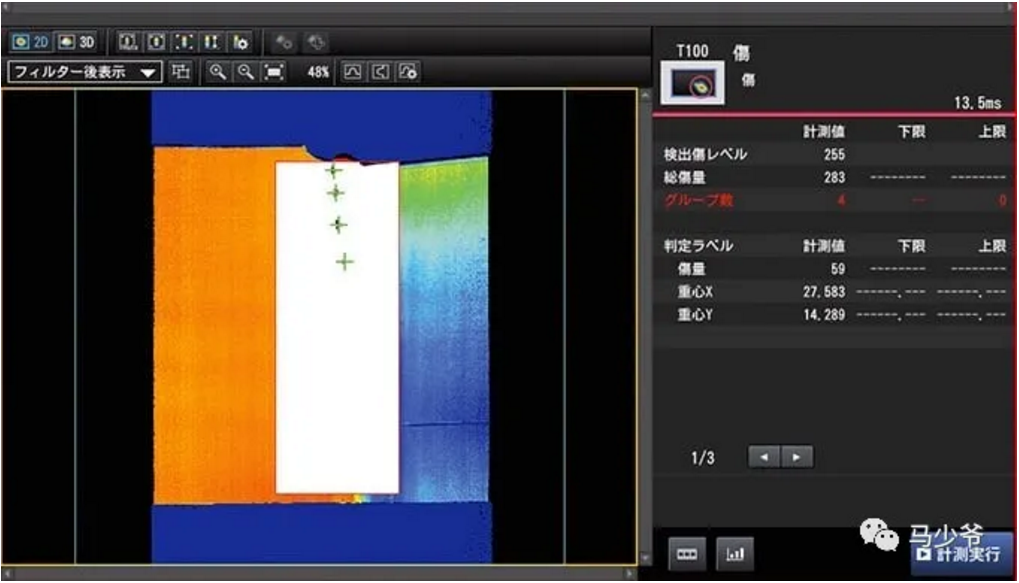
對焊道的3D形狀進行分析,檢測各種不良
借助3D形狀檢測實現(xiàn)的焊接部形狀檢測示例
凹痕、咬邊的容積
搭疊、焊道的高度和體積

焊道表面的開裂、凹陷
電弧擦傷、濺射

焊道的彎曲、錯位
焊道的長度
搭疊或余高不夠、坡口殘留、電弧擦傷、濺射的3D形狀測量示例。
審核編輯 :李倩
-
機器視覺
+關(guān)注
關(guān)注
165文章
4798瀏覽量
126068 -
焊接
+關(guān)注
關(guān)注
38文章
3563瀏覽量
63233 -
視覺傳感器
+關(guān)注
關(guān)注
3文章
276瀏覽量
23870
原文標題:機器視覺焊道質(zhì)量檢測
文章出處:【微信號:www_51qudong_com,微信公眾號:機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
2025年機器視覺光源行業(yè)報告

機器視覺的核心技術(shù)和應用場景
以光為筆,繪就工業(yè)檢測新圖景——機器視覺光源技術(shù)全面解析

機器視覺系統(tǒng)中光源的相關(guān)行業(yè)術(shù)語解讀


思奧特智能機器視覺光源:以光為筆,繪就工業(yè)檢測新圖景

機器視覺缺陷檢測中傳感器集成的五大關(guān)鍵

機器視覺檢測PIN針
博格華納借助康耐視機器視覺技術(shù)提升電動汽車質(zhì)量
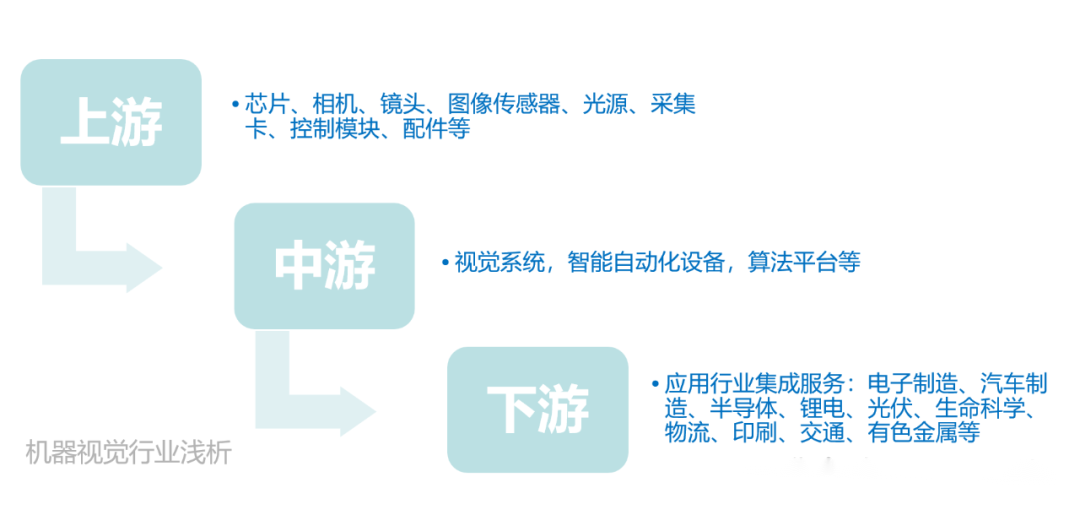
機器視覺行業(yè)2025淺析:規(guī)模、結(jié)構(gòu)與發(fā)展趨勢
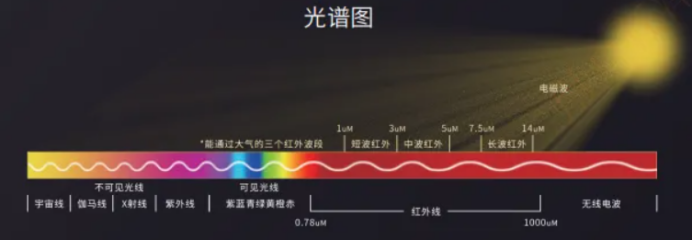
為什么近紅外在機器視覺中表現(xiàn)更優(yōu)
熔池在線視覺檢測系統(tǒng):如何實現(xiàn)焊接質(zhì)量的實時監(jiān)控與提升?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論