 手術機器人是如何輔助手術的?普愛手術機器人臨床案例分享
手術機器人是如何輔助手術的?普愛手術機器人臨床案例分享

手術機器人是一種精密的醫療設備,借助微創傷手術及相關基礎技術的發展而發明。其被用于狹小的手術部位,實現人類能力范圍以外的手術器械操控。手術機器人輔助進行手術,不僅可以準確定位、降低手術風險,讓患者更快康復,還可以縮短手術時間、減少患者射線暴露時間。普愛醫療手術機器人搭配三維C形臂可以開展頸椎、胸椎、腰椎等多節段脊柱手術。
近日,南京醫科大學第二附屬醫院在普愛醫療手術機器人的輔助下,經過團隊成員密切配合,為一名81歲女性胸椎(T12)壓縮性骨折患者成功開展脊柱微創手術。王伯堯主任感慨地說:“胸椎骨折的準確定位是影響手術效果至關重要的因素,傳統手術需要憑借醫生豐富的手術經驗,但在手術機器人的輔助下,我們可以將誤差控制在0.7毫米以下,讓手術更準確、更高效。”
? 患者信息
病例名稱:機器人輔助下經皮椎體球囊擴張成形術
患者性別:女
入院診斷:胸椎壓縮性骨折(T12)(主診斷);腰椎滑脫;腦梗死;高血壓1級;糖尿病。
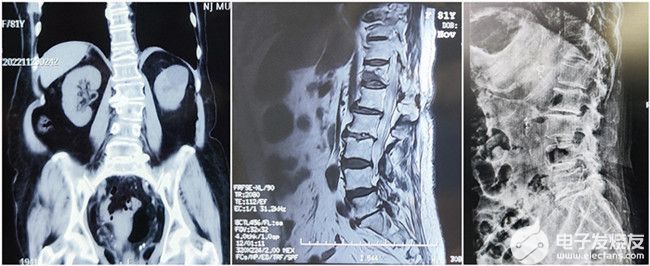
*患者術前影像
王伯堯主任帶領其醫療團隊通過與患者的詳細溝通與交流,綜合評估椎體成形術治療超高齡椎體壓縮性骨折患者的安全性更高,以及病患病情的復雜性,最終決定運用智能化的手段,為患者制定個性化的手術方案,施行骨科機器人輔助下的T12經皮椎體球囊擴張成形術。
手術機器人是如何輔助手術的?
步驟一:C形臂三維重建+機器人手術規劃
使用普愛醫療三維C形臂對患者進行胸椎影像掃描及三維重建,圖像被同步傳輸到普愛醫療手術機器人導航系統。
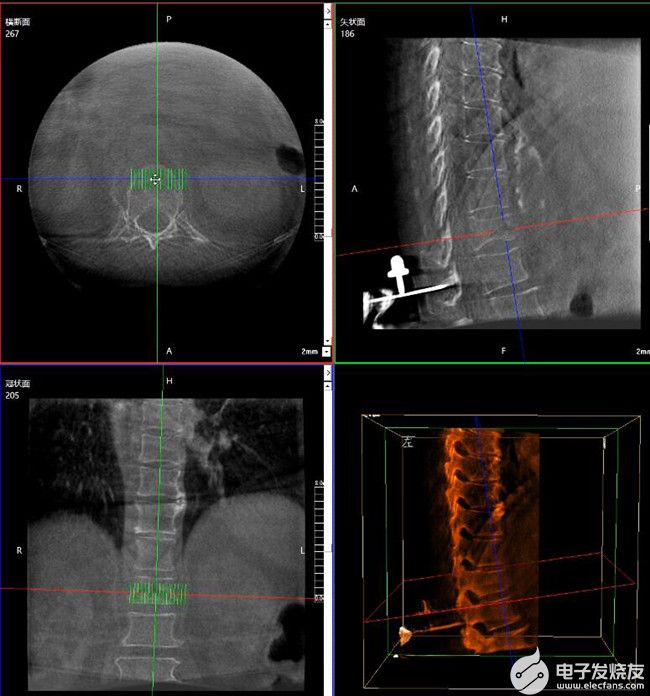
借助普愛醫療手術機器人的規劃軟件進行術前手術路徑模擬規劃,找到穿刺位置和角度,操作機械臂快速完成手術入點的準確定位。

*術前規劃
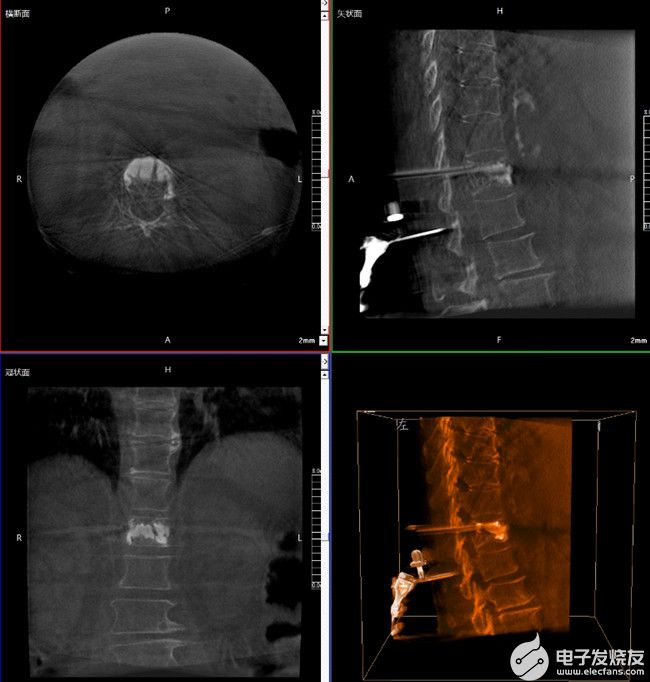
步驟二:手術實施
在病人體表切開一個長1-2cm的創口,沿手術機器人的機械臂定位點方向將克氏針導向套筒,通過創口送至病灶椎體處,并沿套筒方向打入克氏針進行定位。沿導針插入工作套管,取出導針,完成球囊擴張后,通過骨水泥注入器準確地在骨折部位緩慢注入骨水泥,幫助其恢復椎體的形狀和強度。


? 手術效果確認

*骨水泥置入效果良好
良好的臨床使用體驗源于普愛醫療手術機器人導航系統和醫生的配合。亞毫米級的準確定位、直觀的術前規劃和機械臂的執行,使醫生無需擴大創口進行傷椎入針路徑定位,僅需術前三維重建即可全方位了解傷椎位置及穿刺路徑,除了極大的提高了一次性穿刺成功率,機器人手術操作系統還能濾除人手的生理性震動,增強了操作的穩定性。也就是說,手術機器人可以自動識別人手的非自主性小幅度動作,保證手術的精細和安全,實現“超越人手”的目的。
如果您正在為頸、胸、腰椎病、椎管狹窄、腰椎滑脫、脊柱畸形、脊柱骨折等疾病尋求治療方法,且對較小的手術創傷和良好的手術效果有著強烈期待,建議您咨詢您的主治醫生或者科室主任,了解手術機器人輔助手術的情況。
審核編輯 黃昊宇
-
機器人
+關注
關注
213文章
31264瀏覽量
223195 -
醫療設備
+關注
關注
12文章
1068瀏覽量
68771
發布評論請先 登錄
強生醫療科技攜手NVIDIA推進手術機器人開發
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
醫療 AI 機器人邁入 “實時智能時代”,杰和科技 LH85 邊緣計算盒成關鍵推手

醫療術野新突破:MODBUS轉CANOPEN網關打造高性能手術機器人通信骨架

研華科技助力真健康穿刺手術機器人亮相
工業機器人的特點
滾珠導軌:手術機器人與影像設備的精密支撐

【應用】PS-CZ00001 Force Sensor “硬幣”式觸力傳感器在手術機器人中的應用

手術動力裝置微電機的測功機的研究
工業機器人與協作機器人概念不同


盤點#機器人開發平臺
NVIDIA推出AI醫療健康機器人開發平臺




 工商網監
工商網監
評論