") 使用高速同步采樣ADC精確捕獲伺服電機(jī)位置
使用高速同步采樣ADC精確捕獲伺服電機(jī)位置

自主無(wú)人機(jī)和機(jī)器人利用快速、高分辨率、更小的電機(jī)。這些快速旋轉(zhuǎn)的微型電機(jī)需要更多的微型編碼器和小型化IC封裝尺寸。本文介紹了光學(xué)正弦編碼器如何通過(guò) 2mm x 3mm 雙通道同時(shí)采樣 SAR-ADC 提供更高的分辨率和更高的速度。
介紹
從生產(chǎn)車間到自主無(wú)人機(jī),機(jī)器人就在我們身邊,利用快速、高分辨率、更小的電機(jī)。這種快速旋轉(zhuǎn)的微型電機(jī)需要微型編碼器和小型化 IC 封裝尺寸。
所有這些設(shè)計(jì)規(guī)范似乎是相互排斥的;例如,更快的信號(hào)編碼器轉(zhuǎn)換通常會(huì)損害分辨率。這種系統(tǒng)設(shè)計(jì)對(duì)設(shè)計(jì)人員來(lái)說(shuō)具有挑戰(zhàn)性,因?yàn)榭焖傩D(zhuǎn)的電機(jī)不斷需要互補(bǔ)的采樣速度。機(jī)器人執(zhí)行的基本任務(wù)是運(yùn)動(dòng)和傳感,編碼器中具有高分辨率和快速轉(zhuǎn)換速率的模數(shù)轉(zhuǎn)換器(ADC)是其功能的核心。
本文簡(jiǎn)要討論了與為速度更快的旋轉(zhuǎn)電機(jī)實(shí)現(xiàn)小型高精度電機(jī)編碼器相關(guān)的問(wèn)題。本文介紹了一款具有雙通道同時(shí)采樣、逐次逼近寄存器模數(shù)轉(zhuǎn)換器(SAR-ADC)的編碼器,以及如何利用內(nèi)部基準(zhǔn)電壓源和雙通道同時(shí)采樣輸入級(jí)。
電機(jī)編碼器
增量編碼器是一種機(jī)電運(yùn)動(dòng)檢測(cè)器。它有兩個(gè)輸出信號(hào),A和B,指示運(yùn)動(dòng)方向和行進(jìn)距離。這些信號(hào)共同決定了方向和速度。來(lái)自編碼器的第三個(gè)信號(hào)確定電機(jī)的位置。
增量編碼器有兩種類型是線性編碼器和旋轉(zhuǎn)編碼器。線性編碼器在單個(gè)維度或方向上移動(dòng)物品,并將線性位置轉(zhuǎn)換為電子信號(hào)。旋轉(zhuǎn)編碼器繞軸移動(dòng)物品,并將旋轉(zhuǎn)位置或角度轉(zhuǎn)換為電子信號(hào)。每個(gè)輸出信號(hào)對(duì)應(yīng)于軸的恒定角度變化。電機(jī)通常使用增量式旋轉(zhuǎn)編碼器來(lái)執(zhí)行方向、速度和位置跟蹤(圖 2)。
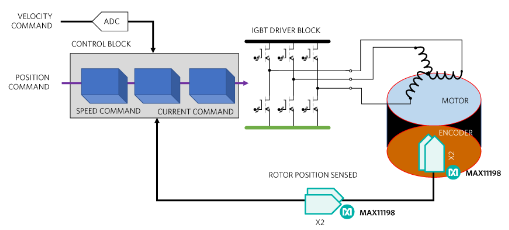
圖2.電機(jī)有效地利用旋轉(zhuǎn)編碼器,量化電機(jī)的方向、速度和位置。
兩種常見的增量式旋轉(zhuǎn)編碼器具有數(shù)字或正弦信號(hào)輸出。數(shù)字增量式旋轉(zhuǎn)編碼器在磁盤上具有輸出 50% 占空比、高或低數(shù)字信號(hào)的模式。
數(shù)字編碼器
光學(xué)數(shù)字編碼器通過(guò)電機(jī)輪的插槽傳輸光線。光接收機(jī)在光線出現(xiàn)時(shí)記錄高數(shù)字輸出,在黑暗中記錄低數(shù)字輸出(圖 3)。
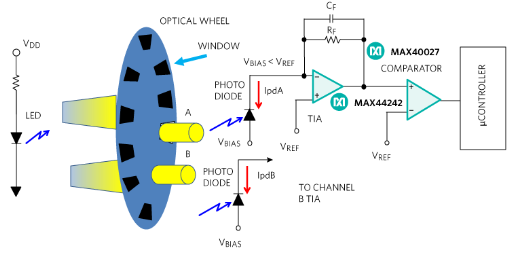
圖3.顯示通道A和通道B的光學(xué)數(shù)字編碼器,其中通道B復(fù)制通道A信號(hào)鏈。
在電機(jī)輪的另一側(cè),光電二極管(圖3)和跨阻放大器檢測(cè)數(shù)字光脈沖。跨阻放大器的接口通過(guò)低輸入 0.5pA 輸入偏置電流和 5nV/√Hz @ 1kHz 低噪聲補(bǔ)充光電二極管。通道A和B中的信號(hào)通過(guò)各自的比較器到達(dá)微控制器,微控制器捕獲最終的數(shù)字事件。通道A和B排列的關(guān)鍵是微控制器同時(shí)鎖存這兩個(gè)信號(hào)。
在圖3中創(chuàng)建一個(gè)穩(wěn)定的TIA電路以消除不確定性非常重要。反饋電阻(RF)和反饋電容(CF) 與放大器的輸入電容(C微分+ C歐蒙模式= C放大 器)和光電二極管寄生電容(C帕金森).最高效的TIA電路是具有65°相位裕量、巴特沃茲響應(yīng)的電路。該相位裕量幅度產(chǎn)生5%的階躍響應(yīng)過(guò)沖。公式1顯示了模擬巴特沃茲響應(yīng)的TIA計(jì)算。
CF= 2* ((C帕金森+ C放大 器) /(2 π RFf英鎊)) - C射頻
其中 f英鎊是單位增益穩(wěn)定放大器和C的增益帶寬乘積射頻是寄生射頻電容。
公式1允許電路設(shè)計(jì)人員改變放大器帶寬/輸入電容以及反饋電阻值。有關(guān) TIA 穩(wěn)定性的更多信息,請(qǐng)參閱 TIA 基礎(chǔ)知識(shí):噪聲傳遞函數(shù)第 4 部分。
在圖 3 中,兩個(gè)光通道 A 和 B 收集電機(jī)的方向和速度數(shù)據(jù)。為了測(cè)量方向,光學(xué)器件的位置和每個(gè)光學(xué)輪窗口之間的距離在A和B方波之間建立了90度相位。電機(jī)方向與相位角的符號(hào)有關(guān)。如果 A 通道的上升沿先于 B 通道的上升沿,則相位差為正(圖 4.a)。
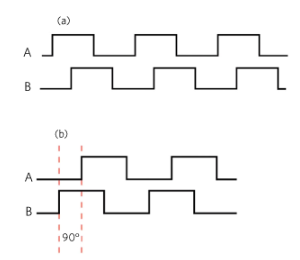
圖4.編碼器同時(shí)捕獲數(shù)字通道A和通道B信號(hào)。
如圖4.b所示,如果A通道的上升沿跟隨B通道的上升沿上升沿,則相位差為負(fù)。
A或B方波的頻率決定了電機(jī)速度。
圖 3 中的機(jī)械結(jié)構(gòu)在一個(gè)電機(jī)軸旋轉(zhuǎn)中產(chǎn)生多個(gè)周期。編碼器制造商生產(chǎn)的增量式數(shù)字旋轉(zhuǎn)編碼器(和增量正弦/余弦旋轉(zhuǎn)編碼器)每轉(zhuǎn) 50 到 5,000 個(gè)周期。
除了數(shù)字信號(hào)外,車輪上還有一個(gè)參考標(biāo)記,用于確定電機(jī)的旋轉(zhuǎn)位置。設(shè)計(jì)工程師將參考標(biāo)記稱為 360 度電機(jī)輪周長(zhǎng)的 0° 角。數(shù)字脈沖參考標(biāo)記計(jì)數(shù)決定了電機(jī)的確切旋轉(zhuǎn)位置。
正弦編碼器
增量式正弦編碼器還提供運(yùn)動(dòng)方向和行進(jìn)距離,并帶有一對(duì)正交正弦和余弦信號(hào)。該編碼器的輸出不是數(shù)字輸出,而是正弦波和余弦波,以更高的速度提供更高的分辨率和運(yùn)動(dòng)距離。
這種類型的編碼器有三個(gè)信號(hào):正弦、余弦和參考脈沖(圖 5)。
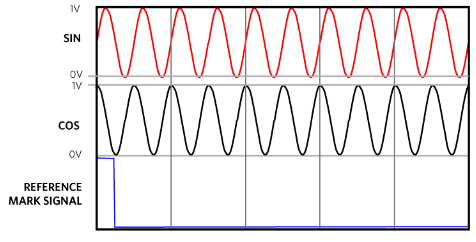
圖5.正弦信號(hào)由正弦波和余弦波組成,編碼器同時(shí)對(duì)兩個(gè)信號(hào)進(jìn)行采樣。
模擬正弦編碼器需要一個(gè)全模擬信號(hào)鏈。從正弦編碼器信號(hào)中提取可靠的位置和速度信息具有一定的模擬信號(hào)預(yù)調(diào)理。在ADC的第一個(gè)輸入端,將SIN和COS信號(hào)(通常為1Vpp輸入信號(hào)范圍)轉(zhuǎn)換為差分信號(hào)。差分信號(hào)可確保最大的抗擾度,并提供適當(dāng)放大和電平轉(zhuǎn)換所得單端SIN和COS信號(hào)的機(jī)會(huì),為模數(shù)轉(zhuǎn)換器(ADC)輸入級(jí)做準(zhǔn)備。
每轉(zhuǎn)都有多個(gè)信號(hào)周期。產(chǎn)生的正弦/余弦頻率取決于信號(hào)周期數(shù)和每分鐘轉(zhuǎn)數(shù)。例如,下面的等式顯示了編碼器的正弦/余弦頻率,該編碼器一轉(zhuǎn)有4,096個(gè)周期,電機(jī)以每分鐘1,400轉(zhuǎn)的速度旋轉(zhuǎn)(公式2):
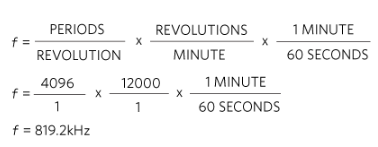
在本例中,信號(hào)鏈解決方案帶寬至少為1600kHz。這種閉環(huán)控制系統(tǒng)需要極低的零延遲,而雙通道同步采樣ADC可提供這種零延遲。編碼器輸出為 1 VP-P(典型值),具有差分正弦和余弦輸出信號(hào)。
模擬信號(hào)鏈要求如下:
兩個(gè)同步采樣ADC:ADC1提供正弦輸出,ADC2提供余弦輸出。
無(wú)系統(tǒng)延遲:最好是SAR(逐次逼近寄存器)轉(zhuǎn)換器(相對(duì)于ΔΣ或流水線轉(zhuǎn)換器)
超過(guò)800 kHz的帶寬,因此ADC以大于每通道1600 ksps的最小速率進(jìn)行轉(zhuǎn)換,以滿足奈奎斯特定理。
2-5P-P差分輸入。
最佳解決方案是雙通道同步采樣 SAR ADC(圖 5)。
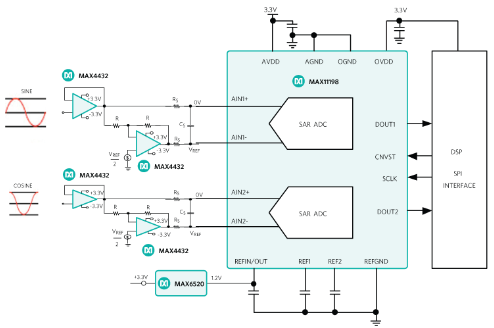
圖6.輸入頻率為800 kHz的雙通道同步采樣2 Msps ADC通過(guò)電機(jī)線圈正弦信號(hào)確定電機(jī)的方向和速度。
在圖6中,兩個(gè)單電源運(yùn)算放大器將輸入信號(hào)轉(zhuǎn)換為差分信號(hào),以驅(qū)動(dòng)全差分ADC。ADC的外部1.2V基準(zhǔn)電壓源為16位轉(zhuǎn)換提供了一個(gè)穩(wěn)壓良好的基準(zhǔn)點(diǎn)。通過(guò)兩個(gè)同步采樣通道,ADC的每通道輸出數(shù)據(jù)速率為2 Msps,可滿足規(guī)定的要求。
在本例中,2mm x 3mm TDFN MAX11198為16位ADC,正弦增量式旋轉(zhuǎn)編碼器一轉(zhuǎn)4,096個(gè)周期。測(cè)量步驟總數(shù)的計(jì)算公式為(公式3):
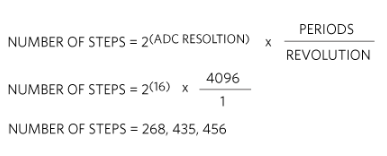
這種方法為設(shè)計(jì)人員提供了 16 位 ADC 分辨率和 4096 周期 (4096 = 212) 表示 16 + 12 或 28 位分辨率或 1.341 × 度以內(nèi)的旋轉(zhuǎn)位置精度。
結(jié)論
本文簡(jiǎn)要討論了與為速度更快的旋轉(zhuǎn)電機(jī)實(shí)現(xiàn)小型高精度電機(jī)編碼器相關(guān)的問(wèn)題。本文介紹了一款具有雙路同時(shí)采樣SAR-ADC的編碼器,并探討了如何利用內(nèi)部基準(zhǔn)電壓源和雙路同時(shí)采樣輸入級(jí)。
電機(jī)控制反饋路徑中有兩種典型的編碼器實(shí)現(xiàn)方式:線性和旋轉(zhuǎn)。我們 從 模擬 信號(hào) 鏈 角度 評(píng)估 了 增量 式 數(shù)字 和 正弦 輸出 的 輸出 信號(hào) 特性, 確保 信號(hào) 完整性 和 最佳 性能。
光學(xué)數(shù)字編碼器提供高分辨率。但是,光學(xué)正弦編碼器以更高的速度提供更高的分辨率。
審核編輯:郭婷
-
編碼器
+關(guān)注
關(guān)注
45文章
3956瀏覽量
142731 -
adc
+關(guān)注
關(guān)注
100文章
7513瀏覽量
556096 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9602瀏覽量
154175
發(fā)布評(píng)論請(qǐng)先 登錄
MT6813 磁角度傳感器在伺服電機(jī)位置檢測(cè)中的應(yīng)用
PLC怎么控制多臺(tái)交流伺服電機(jī)達(dá)到同步工作

深入解析ADS8364:高性能6通道同步采樣ADC的卓越之選

伺服電機(jī)控制系統(tǒng)的高寬帶電流環(huán)參數(shù)設(shè)計(jì)

泰科電子制動(dòng)電機(jī)位置傳感器榮膺2025制尚獎(jiǎng)
ADI 8通道高壓同步采樣ADC AD4858介紹
ADS9218雙路同步采樣 18 位 SAR ADC 技術(shù)文檔總結(jié)
ADS9227雙路同步采樣 16 位 SAR ADC 技術(shù)文檔總結(jié)
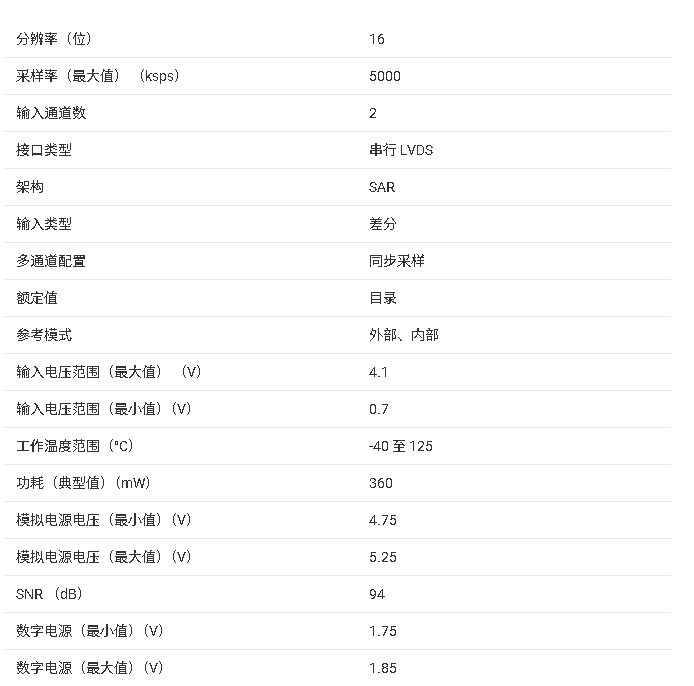
ADS9228 雙通道、同步采樣、16位10MSPS SAR ADC技術(shù)手冊(cè)
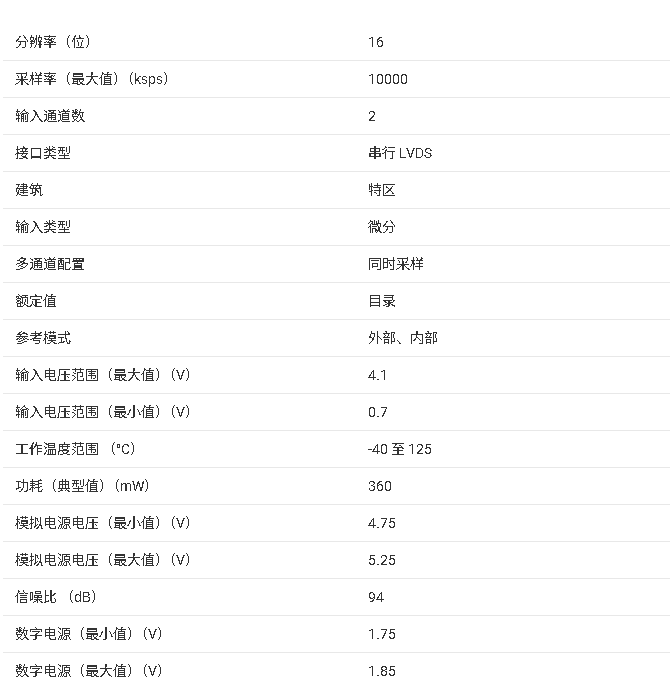
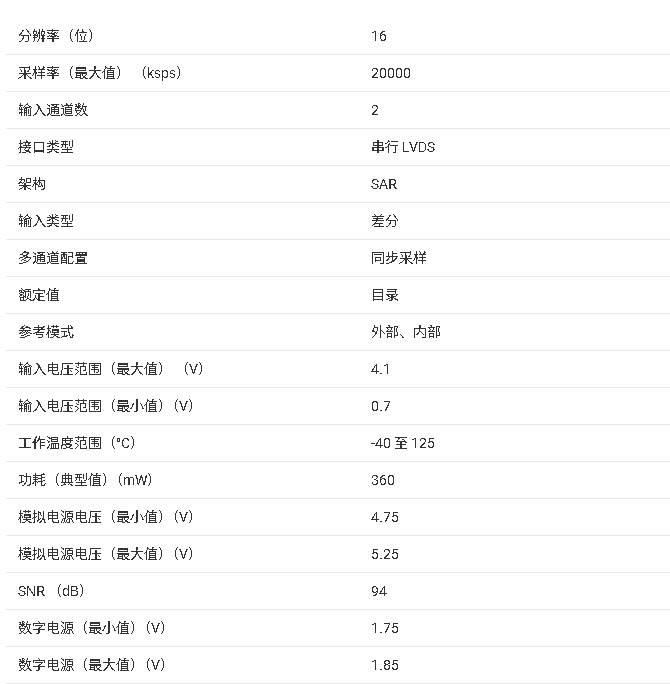
ADS9229雙通道、同步采樣、16位20MSPS SAR ADC技術(shù)手冊(cè)
舵機(jī)與伺服電機(jī)的區(qū)別是什么?
Allegro高速電機(jī)位置傳感器線上研討會(huì)回顧

伺服電機(jī)中的回原點(diǎn)方式

24位同步采樣ADC軟硬件替換ADS1274動(dòng)態(tài)應(yīng)變器應(yīng)用方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論