") 什么是Diffusion Model?Diffusion Model生成圖像過程
什么是Diffusion Model?Diffusion Model生成圖像過程

前言
最近 AI 繪圖非常的火,其背后用到的核心技術(shù)之一就是 Diffusion Model(擴(kuò)散模型),雖然想要完全弄懂 Diffusion Model 和其中復(fù)雜的公式推導(dǎo)需要掌握比較多的前置數(shù)學(xué)知識,但這并不妨礙我們?nèi)ダ斫馄湓怼=酉聛頃怨P者所理解的角度去講解什么是 Diffusion Model。
什么是 Diffusion Model
前向 Diffusion 過程
Diffusion Model 首先定義了一個(gè)前向擴(kuò)散過程,總共包含T個(gè)時(shí)間步,如下圖所示:
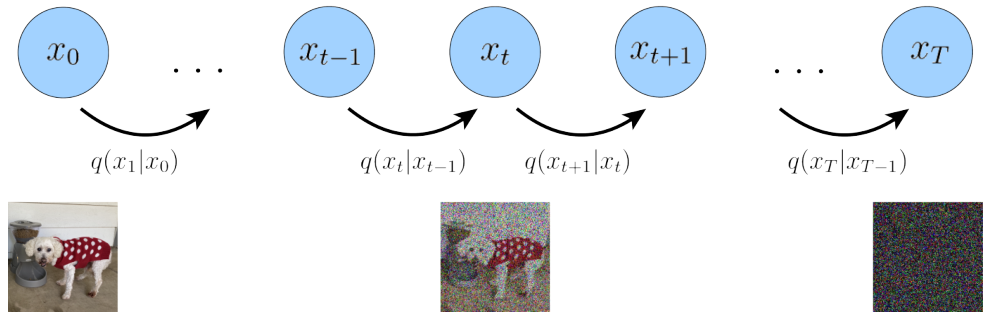
最左邊的藍(lán)色圓圈 x0 表示真實(shí)自然圖像,對應(yīng)下方的狗子圖片。
最右邊的藍(lán)色圓圈 xT 則表示純高斯噪聲,對應(yīng)下方的噪聲圖片。
最中間的藍(lán)色圓圈 xt 則表示加了噪聲的 x0 ,對應(yīng)下方加了噪聲的狗子圖片。
箭頭下方的 q(xt|xt-1) 則表示一個(gè)以前一個(gè)狀態(tài) xt-1 為均值的高斯分布,xt 從這個(gè)高斯分布中采樣得到。
所謂前向擴(kuò)散過程可以理解為一個(gè)馬爾可夫鏈(見參考資料[7]),即通過逐步對一張真實(shí)圖片添加高斯噪聲直到最終變成純高斯噪聲圖片。
那么具體是怎么添加噪聲呢,公式表示如下:

也就是每一時(shí)間步的 xt 是從一個(gè),以 1-βt 開根號乘以 xt-1 為均值,βt為方差的高斯分布中采樣得到的。
其中βt, t ∈ [1, T] 是一系列固定的值,由一個(gè)公式生成。
在參考資料 [2] 中設(shè)置 T=1000, β1=0.0001, βT=0.02,并通過一句代碼生成所有 βt 的值:
# https://pytorch.org/docs/stable/generated/torch.linspace.html betas = torch.linspace(start=0.0001, end=0.02, steps=1000)
然后在采樣得到 xt 的時(shí)候并不是直接通過高斯分布 q(xt|xt-1) 采樣,而是用了一個(gè)重參數(shù)化的技巧(詳見參考資料[4]第5頁)。
簡單來說就是,如果想要從一個(gè)任意的均值 μ 方差 σ^2 的高斯分布中采樣
可以首先從一個(gè)標(biāo)準(zhǔn)高斯分布(均值0,方差1)中進(jìn)行采樣得到 ε,
然后 μ + σ·ε 就等價(jià)于從任意高斯分布中進(jìn)行采樣的結(jié)果。公式表示如下:

接著回來看具體怎么采樣得到噪聲圖片 xt呢,
也是首先從標(biāo)準(zhǔn)高斯分布中采樣,接著乘以標(biāo)準(zhǔn)差再加上均值 ,偽代碼如下:
# https://pytorch.org/docs/stable/generated/torch.randn_like.html betas = torch.linspace(start=0.0001, end=0.02, steps=1000) noise = torch.randn_like(x_0) xt = sqrt(1-betas[t]) * xt-1 + sqrt(betas[t]) * noise
然后前向擴(kuò)散過程還有個(gè)屬性,就是可以直接從 x0 采樣得到中間任意一個(gè)時(shí)間步的噪聲圖片 xt,公式如下:

其中的 αt 表示:
具體怎么推導(dǎo)出來的可以看參考資料[4] 第11頁,偽代碼表示如下:
betas = torch.linspace(start=0.0001, end=0.02, steps=1000) alphas = 1 - betas # cumprod 相當(dāng)于為每個(gè)時(shí)間步 t 計(jì)算一個(gè)數(shù)組 alphas 的前綴乘結(jié)果 # https://pytorch.org/docs/stable/generated/torch.cumprod.html alphas_cum = torch.cumprod(alphas, 0) alphas_cum_s = torch.sqrt(alphas_cum) alphas_cum_sm = torch.sqrt(1 - alphas_cum) # 應(yīng)用重參數(shù)化技巧采樣得到 xt noise = torch.randn_like(x_0) xt = alphas_cum_s[t] * x_0 + alphas_cum_sm[t] * noise
通過上述的講解,讀者應(yīng)該對 Diffusion Model 的前向擴(kuò)散過程有比較清晰的理解了。
不過我們的目的不是要做圖像生成嗎?
現(xiàn)在只是從數(shù)據(jù)集中的真實(shí)圖片得到一張?jiān)肼晥D,那具體是怎么做圖像生成呢?
反向 Diffusion 過程
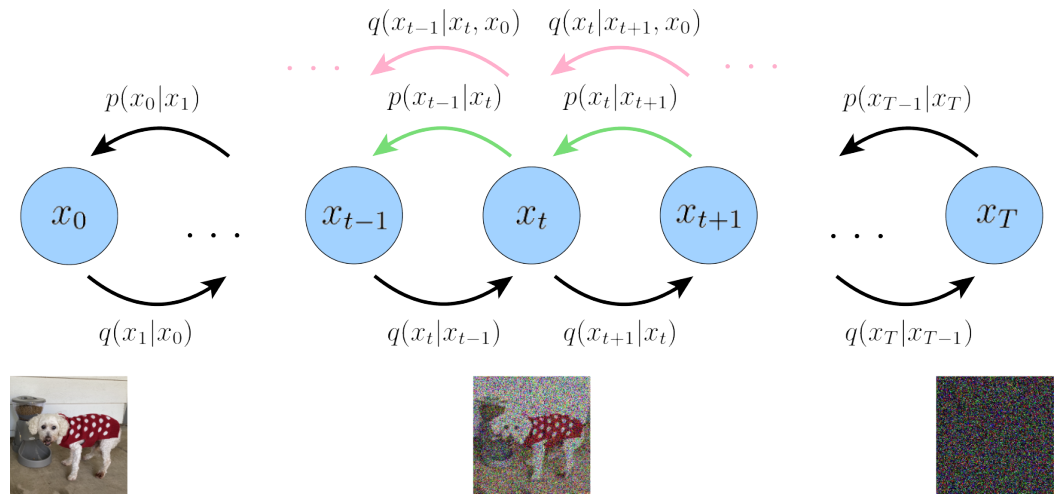
反向擴(kuò)散過程 q(xt-1|xt, x0) (看粉色箭頭)是前向擴(kuò)散過程 q(xt|xt-1) 的后驗(yàn)概率分布。
和前向過程相反是從最右邊的純高斯噪聲圖,逐步采樣得到真實(shí)圖像 x0。
后驗(yàn)概率 q(xt-1|xt, x0) 的形式可以根據(jù)貝葉斯公式推導(dǎo)得到(推導(dǎo)過程詳見參考資料[4]第12頁):

也是一個(gè)高斯分布。
其方差從公式上看是個(gè)常量,所有時(shí)間步的方差值都是可以提前計(jì)算得到的:
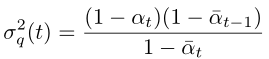
計(jì)算偽代碼如下:
betas = torch.linspace(start=0.0001, end=0.02, steps=1000) alphas = 1 - betas alphas_cum = torch.cumprod(alphas, 0) alphas_cum_prev = torch.cat((torch.tensor([1.0]), alphas_cum[:-1]), 0) posterior_variance = betas * (1 - alphas_cum_prev) / (1 - alphas_cum)
然后看均值的計(jì)算,

對于反向擴(kuò)散過程,在采樣生成 xt-1 的時(shí)候 xt 是已知的,而其他系數(shù)都是可以提前計(jì)算得到的常量。
但是現(xiàn)在問題來了,在真正通過反向過程生成圖像的時(shí)候,x0 我們是不知道的,因?yàn)檫@是待生成的目標(biāo)圖像。
好像變成了雞生蛋,蛋生雞的問題,那該怎么辦呢?
Diffusion Model 訓(xùn)練目標(biāo)
當(dāng)一個(gè)概率分布q 求解困難的時(shí)候,我們可以換個(gè)思路(詳見參考資料[5,6])。
通過人為構(gòu)造一個(gè)新的分布 p,然后目標(biāo)就轉(zhuǎn)為縮小分布 p 和 q 之間差距。
通過不斷修改 p 的參數(shù)去縮小差距,當(dāng) p 和 q 足夠相似的時(shí)候就可以替代 q 了。
然后回到反向 Diffusion 過程,由于后驗(yàn)分布 q(xt-1|xt, x0) 沒法直接求解。
那么我們就構(gòu)造一個(gè)高斯分布 p(xt-1|xt)(見綠色箭頭),讓其方差和后驗(yàn)分布 q(xt-1|xt, x0) 一致:
而其均值則設(shè)為:

和 q(xt-1|xt, x0) 的區(qū)別在于,x0 改為 xθ(xt, t) 由一個(gè)深度學(xué)習(xí)模型預(yù)測得到,模型輸入是噪聲圖像 xt 和時(shí)間步 t 。
然后縮小分布 p(xt-1|xt) 和 q(xt-1|xt, x0) 之間差距,變成優(yōu)化以下目標(biāo)函數(shù)(推導(dǎo)過程詳見參考資料[4]第13頁):

但是如果讓模型直接從 xt 去預(yù)測 x0,這個(gè)擬合難度太高了,我們再繼續(xù)換個(gè)思路。
前面介紹前向擴(kuò)散過程提到,xt 可以直接從 x0 得到:

將上面的公式變換一下形式:
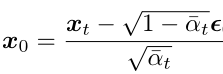
代入上面 q(xt-1|xt, x0) 的均值式子中可得(推導(dǎo)過程詳見參考資料[4]第15頁):
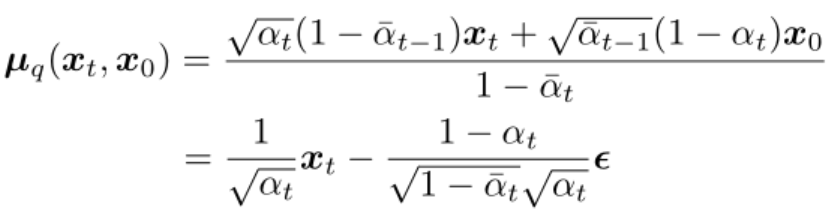
觀察上述變換后的式子,發(fā)現(xiàn)后驗(yàn)概率 q(xt-1|xt, x0) 的均值只和 xt 和前向擴(kuò)散時(shí)候時(shí)間步 t 所加的噪聲有關(guān)。
所以我們同樣對構(gòu)造的分布 p(xt-1|xt) 的均值做一下修改:

將模型改為去預(yù)測在前向時(shí)間步 t 所添加的高斯噪聲 ε,模型輸入是 xt 和 時(shí)間步 t:

接著優(yōu)化的目標(biāo)函數(shù)就變?yōu)椋ㄍ茖?dǎo)過程詳見參考資料[4]第15頁):

然后訓(xùn)練過程算法描述如下,最終的目標(biāo)函數(shù)前面的系數(shù)都去掉了,因?yàn)槭浅A浚?/p>
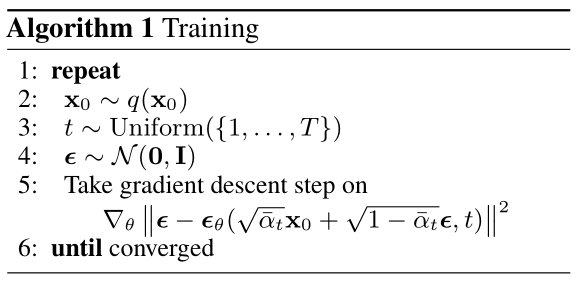
可以看到雖然前面的推導(dǎo)過程很復(fù)雜,但是訓(xùn)練過程卻很簡單。
首先每個(gè)迭代就是從數(shù)據(jù)集中取真實(shí)圖像 x0,并從均勻分布中采樣一個(gè)時(shí)間步 t,
然后從標(biāo)準(zhǔn)高斯分布中采樣得到噪聲 ε,并根據(jù)公式計(jì)算得到 xt。
接著將 xt 和 t 輸入到模型讓其輸出去擬合預(yù)測噪聲 ε,并通過梯度下降更新模型,一直循環(huán)直到模型收斂。
而采用的深度學(xué)習(xí)模型是類似 UNet 的結(jié)構(gòu)(詳見參考資料[2]附錄B)。
訓(xùn)練過程的偽代碼如下:
betas = torch.linspace(start=0.0001, end=0.02, steps=1000)
alphas = 1 - betas
alphas_cum = torch.cumprod(alphas, 0)
alphas_cum_s = torch.sqrt(alphas_cum)
alphas_cum_sm = torch.sqrt(1 - alphas_cum)
def diffusion_loss(model, x0, t, noise):
# 根據(jù)公式計(jì)算 xt
xt = alphas_cum_s[t] * x0 + alphas_cum_sm[t] * noise
# 模型預(yù)測噪聲
predicted_noise = model(xt, t)
# 計(jì)算Loss
return mse_loss(predicted_noise, noise)
for i in len(data_loader):
# 從數(shù)據(jù)集讀取一個(gè) batch 的真實(shí)圖片
x0 = next(data_loader)
# 采樣時(shí)間步
t = torch.randint(0, 1000, (batch_size,))
# 生成高斯噪聲
noise = torch.randn_like(x_0)
loss = diffusion_loss(model, x0, t, noise)
optimizer.zero_grad()
loss.backward()
optimizer.step()
Diffusion Model 生成圖像過程
模型訓(xùn)練好之后,在真實(shí)的推理階段就必須從時(shí)間步 T 開始往前逐步生成圖片,算法描述如下:
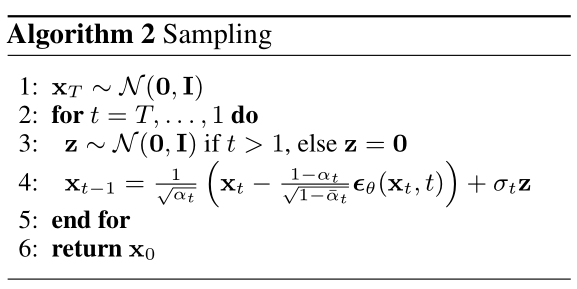
一開始先生成一個(gè)從標(biāo)準(zhǔn)高斯分布生成噪聲,然后每個(gè)時(shí)間步 t,將上一步生成的圖片 xt 輸入模型模型預(yù)測出噪聲。接著從標(biāo)準(zhǔn)高斯分布中采樣一個(gè)噪聲,根據(jù)重參數(shù)化技巧,后驗(yàn)概率的均值和方差公式,計(jì)算得到 xt-1,直到時(shí)間步 1 為止。
改進(jìn) Diffusion Model
文章 [3] 中對 Diffusion Model 提出了一些改進(jìn)點(diǎn)。
對方差 βt 的改進(jìn)
前面提到 βt 的生成是將一個(gè)給定范圍均勻的分成 T 份,然后每個(gè)時(shí)間步對應(yīng)其中的某個(gè)點(diǎn):
betas = torch.linspace(start=0.0001, end=0.02, steps=1000)
然后文章 [3] 通過實(shí)驗(yàn)觀察發(fā)現(xiàn),采用這種方式生成方差 βt 會導(dǎo)致一個(gè)問題,就是做前向擴(kuò)散的時(shí)候到靠后的時(shí)間步噪聲加的太多了。
這樣導(dǎo)致的結(jié)果就是在前向過程靠后的時(shí)間步,在反向生成采樣的時(shí)候并沒有產(chǎn)生太大的貢獻(xiàn),即使跳過也不會對生成結(jié)果有多大的影響。
接著論文[3] 中就提出了新的 βt 生成策略,和原策略在前向擴(kuò)散的對比如下圖所示:

第一行就是原本的生成策略,可以看到還沒到最后的時(shí)間步就已經(jīng)變成純高斯噪聲了,
而第二行改進(jìn)的策略,添加噪聲的速度就慢一些,看起來也更合理。
實(shí)驗(yàn)結(jié)果表明,針對 imagenet 數(shù)據(jù)集 64x64 的圖片,原始的策略在做反向擴(kuò)散的時(shí)候,即使跳過開頭的 20% 的時(shí)間步,都不會對指標(biāo)有很大的影響。
然后看下新提出的策略公式:

其中 s 設(shè)置為 0.008同時(shí)限制 βt最大值為 0.999,偽代碼如下:
T = 1000 s = 8e-3 ts = torch.arange(T + 1, dtype=torch.float64) / T + s alphas = ts / (1 + s) * math.pi / 2 alphas = torch.cos(alphas).pow(2) alphas = alphas / alphas[0] betas = 1 - alphas[1:] / alphas[:-1] betas = betas.clamp(max=0.999)
對生成過程時(shí)間步數(shù)的改進(jìn)
原本模型訓(xùn)練的時(shí)候是假定在 T個(gè)時(shí)間步下訓(xùn)練的,在生成圖像的時(shí)候,也必須從 T 開始遍歷到 1 。而論文 [3] 中提出了一種不需要重新訓(xùn)練就可以減少生成步數(shù)的方法,從而顯著提升生成的速度。
這個(gè)方法簡單描述就是,原來是 T 個(gè)時(shí)間步現(xiàn)在設(shè)置一個(gè)更小的時(shí)間步數(shù) S ,將 S 時(shí)間序列中的每一個(gè)時(shí)間步 s 和 T時(shí)間序列中的步數(shù) t 對應(yīng)起來,偽代碼如下:
T = 1000
S = 100
start_idx = 0
all_steps = []
frac_stride = (T - 1) / (S - 1)
cur_idx = 0.0
s_timesteps = []
for _ in range(S):
s_timesteps.append(start_idx + round(cur_idx))
cur_idx += frac_stride
接著計(jì)算新的 β ,St 就是上面計(jì)算得到的 s_timesteps:
偽代碼如下:
alphas = 1 - betas
alphas_cum = torch.cumprod(alphas, 0)
last_alpha_cum = 1.0
new_betas = []
# 遍歷原來的 alpha 前綴乘序列
for i, alpha_cum in enumerate(alphas_cum):
# 當(dāng)原序列 T 的索引 i 在新序列 S 中時(shí),計(jì)算新的 beta
if i in s_timesteps:
new_betas.append(1 - alpha_cum / last_alpha_cum)
last_alpha_cum = alpha_cum
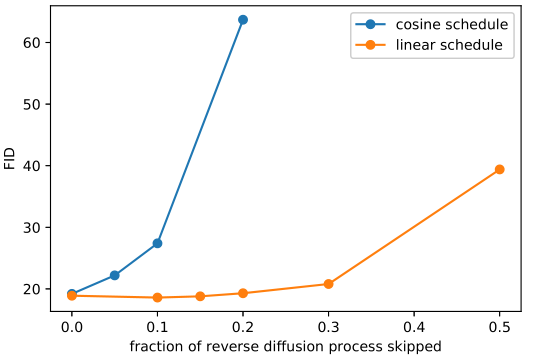
簡單看下實(shí)驗(yàn)結(jié)果:
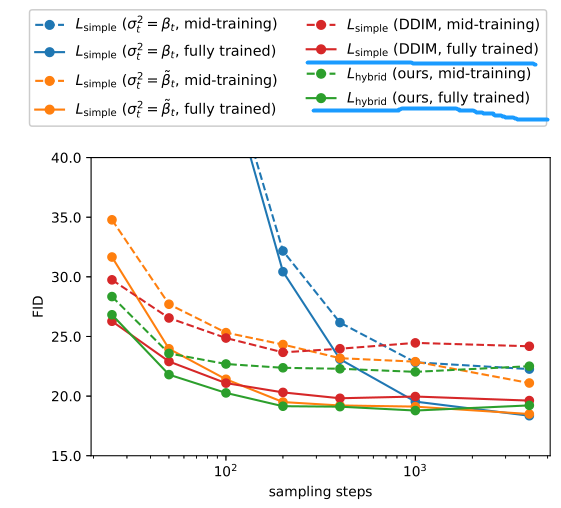
關(guān)注畫藍(lán)線的紅色和綠色實(shí)線,可以看到采樣步數(shù)從 1000 縮小到 100 指標(biāo)也沒有降多少。
審核編輯:劉清
-
圖像處理
+關(guān)注
關(guān)注
29文章
1342瀏覽量
59530
原文標(biāo)題:一文弄懂 Diffusion Model
文章出處:【微信號:GiantPandaCV,微信公眾號:GiantPandaCV】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于擴(kuò)散模型的圖像生成過程

Stable Diffusion的完整指南:核心基礎(chǔ)知識、制作AI數(shù)字人視頻和本地部署要求
Stability AI開源圖像生成模型Stable Diffusion
從一個(gè)名為DDPM的模型說起
一文讀懂Stable Diffusion教程,搭載高性能PC集群,實(shí)現(xiàn)生成式AI應(yīng)用

基于Diffusion Probabilistic Model的醫(yī)學(xué)圖像分割
使用OpenVINO?在算力魔方上加速stable diffusion模型

優(yōu)化 Stable Diffusion 在 GKE 上的啟動(dòng)體驗(yàn)
樹莓派能跑Stable Diffusion了?
DDFM:首個(gè)使用擴(kuò)散模型進(jìn)行多模態(tài)圖像融合的方法

NeurIPS 2023 | 擴(kuò)散模型解決多任務(wù)強(qiáng)化學(xué)習(xí)問題
Stability AI試圖通過新的圖像生成人工智能模型保持領(lǐng)先地位




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論