 三菱伺服系統的基礎和應用介紹
三菱伺服系統的基礎和應用介紹

第1章 什么是伺服?
1.1伺服的作用
將物體移動到規定的位置,或者跟蹤一個運動的目標時,經常能聽到“伺服”這個詞。“伺服(Servo)機構”一詞的詞源據說來自拉丁語中的“Servus”,即“奴隸”的意思。表示完全按照指令行動而構建的控制系統。利用伺服機構可進行位置、速度、轉矩的單項控制及組合控制。 位置控制 可正確地移動到指定位置,或停止在指定位置。位置精度有的已可達到微米(μm:千分之一毫米)以內,還能進行頻繁的起動、停止。
速度控制 目標速度變化時,也可快速響應。即使負載變化,也可最大限度地縮小與目標速度的差異。能實現在寬廣的速度范圍內連續運行。
轉矩控制 即使負載變化,也可根據指定轉矩正確運行。※轉矩是使轉軸旋轉的“力”。
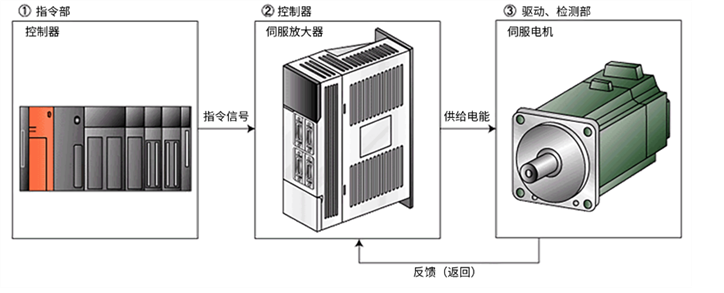
為了實現既靈敏又高精度的動作,始終確認自己的動作狀態,避免與指令發生偏差而不斷進行反饋(feed back),這就是伺服機構的特點。如何進行控制以縮小指令信號與反饋信號之差至關重要。 JIS中“伺服機構”的定義:“以物體的位置、方位、姿勢等作為控制量,為跟蹤目標的任何變化而構建的控制系統” 伺服機構大致由下列各部分組成。
| 指令部 | 發出動作的指令信號。 | 驅動、檢測部 | 驅動控制對象,對其運行狀態進行檢測。 |
| 控制部 | 使電機等按照指令運行。 |
實際的機構雖然也有液壓式和氣壓式的,但最近廣泛使用維護性能優良的電氣式伺服機構。
電氣式伺服機構中尤其與FA相關的精密控制中,經常使用AC伺服系統。
而且,伺服電機常帶有可檢測旋轉角度、速度和方向的編碼器,它可將檢測信息反饋給伺服放大器(控制部)。
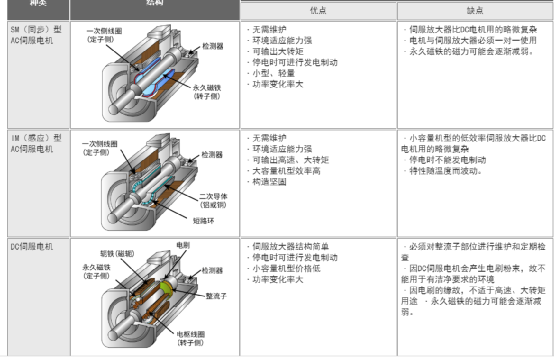
[ 伺服電機的種類 ] 普通的伺服電機有SM(同步)型AC伺服電機、IM(感應)型AC伺服電機和DC伺服電機3種。
與FA相關的伺服電機,尤其是需求量大的中、小容量,由于下列原因通常說到伺服一般都是指SM型AC伺服電機。

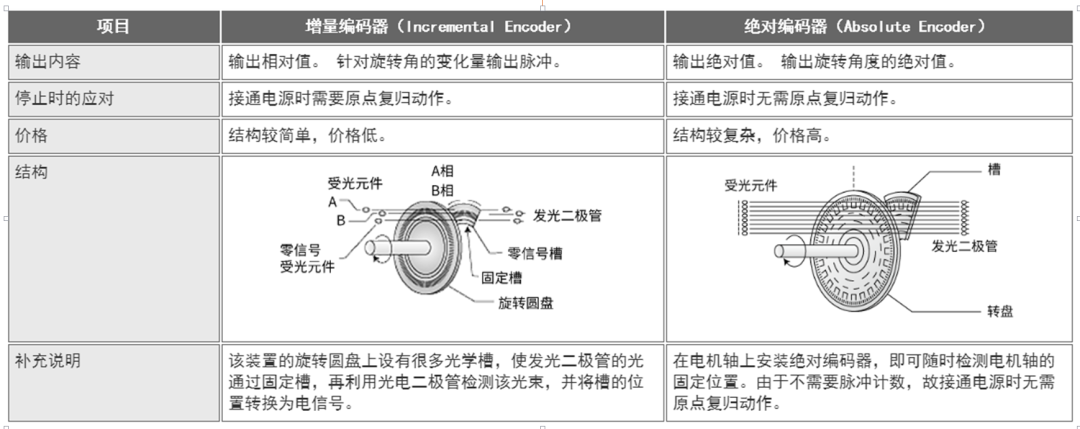
1.2編碼器的種類 <增量編碼器與絕對編碼器> 最新的伺服電機多采用停電后無需進行原點復歸的絕對編碼器。絕對編碼器中有檢測電機旋轉1圈內所處位置的絕對位置檢測部和計算旋轉了幾圈的多圈檢測部。為了防止多圈檢測數據在停電時丟失,由電池維持數據。
下圖為光學式編碼器的原理說明。最近,各公司已對分辨率極高(也有超過100萬[脈沖/轉])的編碼器實現了產品化。通常,光學式編碼器用于追求小型化或高分辨率等特性的應用領域,在特別追求耐環境性能(耐污染性能強等)的應用領域,有時也使用磁力式編碼器
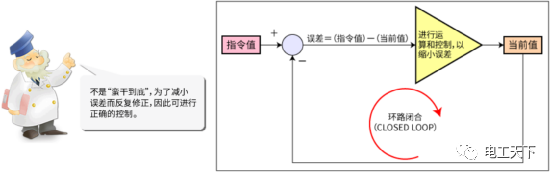
1.3伺服的原理和構成 伺服系統的最大特點是“比較指令值與當前值,為了縮小該誤差”進行反饋控制。 反饋控制中,確認機械(控制對象)是否忠實地按照指令進行跟蹤,有誤差(偏差)時改變控制內容,并將這一過程進行反復控制,以到達目標。 注意到該控制流程是:誤差→當前值→誤差,形成一個閉合的環,因此也稱為閉環(CLOSED LOOP)。
反之,無反饋的方式,則稱為開環(OPEN LOOP)。
根據指令值的不同,伺服系統的控制模式有以下3種。 (1) 位置控制模式
(2) 速度控制模式
(3) 轉矩控制模式 有的伺服產品,還可在運行過程中切換模式。
| 例. | 從速度控制模式切換到轉矩控制模式 |
卷筒開始卷繞時以指定速度(速度控制模式)運行。 之后為了以恒定張力卷繞,按轉矩控制模式運行。 |
此外,最近有一種稱為“運動控制”的控制方式也開始被采用,它適用于由1臺控制器對多個軸進行同時控制的多軸同步控制。 伺服的控制環 從信號的流程著眼,伺服的構成如下圖所示。
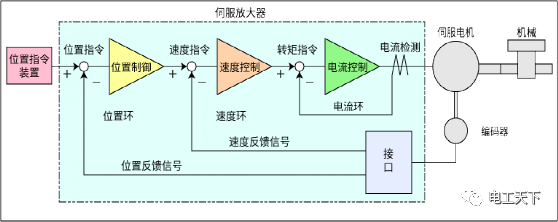
在AC伺服系統中,對裝在伺服電機上的編碼器所發出的脈沖信號或伺服電機的電流進行檢測,將結果反饋至伺服放大器,并根據這個結果按照指令來控制機械。 該反饋有以下3種環。
| 位置環 | 根據編碼器脈沖生成的位置反饋信號,進行位置控制的環。 |
| 速度環 | 根據編碼器脈沖生成的速度反饋信號,進行速度控制的環。 |
| 電流環 | 檢測伺服放大器的電流,根據生成的電流反饋信號,進行轉矩控制的環。 |
各環都朝著使指令信號與反饋信號之差為零的目標進行控制。
各環的響應速度按下述順序漸高。 (位置環)<(速度環)<(電流環) 各控制模式中使用的環如下所示。
| 控制模式 | 使用的環 |
| 位置控制模式 | 位置環、速度環、電流環 |
| 速度控制模式 | 速度環、電流環 |
| 轉矩控制模式 | 電流環 (但是,空載狀態下必須限制速度) |
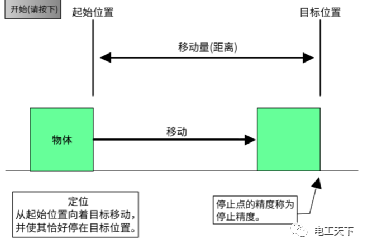
[ 位置控制模式 ] (a) 定位控制的目標 FA設備中的“定位”是指工件或工具(鉆頭、銑刀)等以合適的速度向著目標位置移動,并高精度地停止在目標位置。這樣的控制稱為“定位控制”。
可以說伺服系統主要用來實現這種“定位控制”的目的。
定位控制的要求是“始終正確地監視電機的旋轉狀態”,為了達到此目的而使用檢測伺服電機旋轉狀態的編碼器。
而且,為了使其具有迅速跟蹤指令的能力,伺服電機選用體現電機動力性能的起動轉矩大而電機本身慣性小的專用電機。 伺服系統的定位控制基本特點如下所述。 ?機械的移動量與指令脈沖的總數成正比。 ?機械的速度與指令脈沖串的速度(脈沖頻率)成正比。 ?最終在±1個脈沖的范圍內定位即完成,此后只要不改變位置指令,則始終保持在該位置。
(伺服鎖定功能)
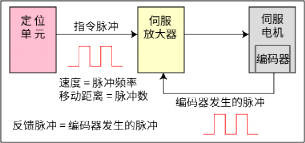
因此,伺服系統中的位置精度由以下各項決定。 ?伺服電機每轉1圈機械的移動量 ?伺服電機每轉1圈編碼器輸出的脈沖數 ?機械系統中的間隙(松動)等誤差 [ 速度控制模式 ] 伺服系統的速度控制特點:可實現“精細、速度范圍寬、速度波動小”的運行。 (a) 速度加速·減速常數設定
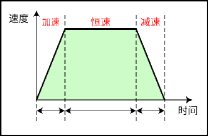
可調整加減速運動中的加速度(速度變化率),避免加速、減速時的沖擊。 (b) 速度控制范圍寬 可進行從微速到高速的寬范圍的速度控制。
(1:1000~5000左右)速度控制范圍內為恒轉矩特性。 (c) 速度變化率小 即使負載有變化,也可進行小速度波動的運行。 [ 轉矩控制模式 ] 轉矩控制就是通過控制伺服電機的電流,以達到輸出目標轉矩的控制。 <以收卷控制為例> (a) 進行恒定的張力控制時,由于負載轉矩會因收卷滾筒半徑的增大而增加,因此,需據此對伺服電機的輸出轉矩進行控制。
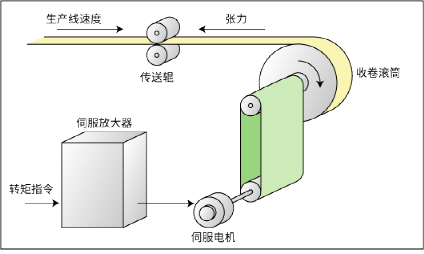
(b) 卷繞過程中材料斷裂時,將因負載變輕而高速旋轉,因此,必須設定速度限制值。

第2章 變頻器與伺服有什么區別? 2.1用途、規格的區別
(通用)變頻器與(通用)伺服在使用目的、功能方面存在本質上的差異。選擇哪一個取決于運行模式、負載條件、價格等因素。
| 比較項目 | (通用)變頻器 | (通用)變伺服 | |
| 控制用途 | 控制對象為比較緩和的穩定狀態。 | 要求進行過渡性的高速、高精度控制的用途。 | |
| 控制功能 | 基本上以速度控制模式為對象。 | 適用于位置控制、速度控制和轉矩控制的各種模式。 | |
| 使用電機 | 使用通用(感應)電機。 | 基本上根據與伺服放大器的關系有專用的固定的幾種類型 | |
| 多臺電機的運行 | 1臺變頻器可驅動多臺電機。 | 原則上1臺伺服放大器驅動1臺電機。 | |
| 價格 | (比較)低。 | (比較)高。 | |
| 響應性能(越高越好) | 低。100rad/s以下。 | 高。200~1500rad/s左右。 | |
| 停止精度 | 最高可達100μm左右。 | 最高可達1μm左右。 | |
| 起動/停止頻率(可起動/停止的次數) | 20次/分鐘以下。 | 20~600次/分鐘左右。 | |
| 速度變化率 | 大。由于沒有速度反饋,會受到負載變化等的影響。 | 小。由于有速度反饋,可排除負載變化等的影響。 | |
| 連續運行范圍(100%負載下連續運行) | 小。1:10左右。 | 大。1:1000~1:5000左右。 | |
| 最大轉矩(額定轉矩比) | 150%左右。 | 300%左右。 | |
| 輸出功率 | 100W~300KW左右。 | 10W~60KW左右。 | |
2.2基本構成的比較 大致分為進行電力變換的主回路和指示如何進行變換的控制回路。
| 主回路 |
變頻器與伺服的構成基本相同。 兩者的區別在于伺服中增加了稱為動態制動器的部件。 停止時該部件能吸收伺服電機積蓄的慣性能量,對伺服電機進行制動。 |
| 控制回路 |
與變頻器相比,伺服的構成相當復雜。 為了實現伺服機構,需要復雜的反饋、控制模式切換、限制(電流/速度/轉矩)等功能。 |
(1) 變頻器的基本構成
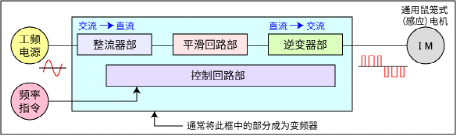
各部分的作用如下。
| ● 整流器部 | ??? | 將工頻電源從交流轉換為直流。 |
| ● 平滑回路部 | ??? | 使直流中的波動成分變得平滑。 |
| ● 逆變器部 | ??? | 將直流轉換為頻率可調的交流。 |
| ● 控制回路部 | ??? | 主要控制逆變器部。 |
(2) 伺服的各基本構成部分作用如下。
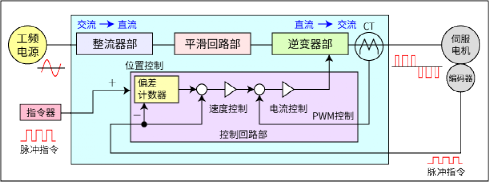
| ● 整流器部 | ??? | 將工頻電源從交流轉換為直流。(與變頻器相同) |
| ● 平滑回路部 | ??? | 使直流中的波動成分變得平滑。(與變頻器相同) |
| ● 逆變器部 | ??? |
將直流轉換為頻率可調的交流。 與變頻器的區別在于伺服中增加了稱為動態制動器的部件。 |
| ● 控制回路部 | ??? |
主要控制逆變器部。 與變頻器相比,伺服的構成相當復雜。因為伺服機構需要反饋、控制模式切換、限制(電流/速度/轉矩)等功能。 |
2.3由變頻器變更為伺服 基本上伺服的性能比變頻器優越。
因此,由變頻器變更為伺服時,一般不會產生運行方面的問題。但是,必須考慮下列幾點。
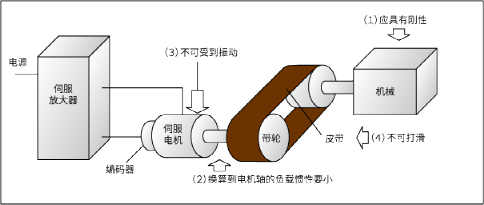
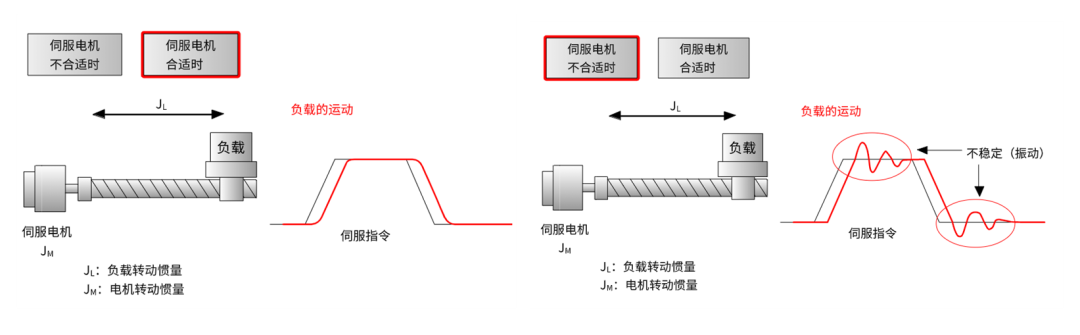
(1)機械側的剛性 伺服的最大轉矩大約是變頻器的2倍。因此,如果機械結構比較脆弱,加、減速時可能會產生振動(振蕩現象)。此時,須采取加固機械結構、減小伺服系統的增益(控制靈敏度)等措施。 三菱電機的某些伺服產品在伺服放大器控制環路中內置了濾波器功能,在機械容易振動的頻率(共振頻率)附近能自動調小伺服系統的增益,使設備具有抑制振動的功能。 (2) 換算到電機軸的負載慣性大小(慣性) 與變頻器相比,伺服對于負載慣性的大小很敏感。
相對于電機本身的轉動慣量,如果負載的轉動慣量過大,則電機軸會被負載拖著旋轉,從而導致控制不穩定。 因此,根據機械負載選擇合適的伺服容量至關重要。 以穩定性為目標,相對于電機本身的轉動慣量,希望負載轉動慣量(換算到電機軸)的倍數小于該電機的“推薦負載轉動慣量比”。
(3) 電機軸的振動 安裝電機的部位發生機械性振動時,會給電機的轉軸帶來影響。
尤其對內置編碼器的伺服電機,有時必須采取降低振動的措施。 (4) 減速機構的打滑 有V形帶減速機構的系統,為了使皮帶傳動部分不打滑,必須采取一些措施,如同步帶等。
審核編輯:郭婷
-
控制系統
+關注
關注
41文章
6961瀏覽量
114123 -
伺服電機
+關注
關注
88文章
2186瀏覽量
61311
原文標題:三菱伺服系統入門知識,學習筆記!
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
提高步進伺服系統精度的措施

三菱FX3U PLC控制伺服電機的高速脈沖模式解析

一文解析伺服系統CN1接口的DI/DO端子功能

三菱伺服接線參數更改調試經驗分享
打通日德血脈!CC LINK IE轉PROFINET網關,讓三菱大腦與伺服筋骨神同步

三菱伺服電機抖動聲響的調整
CCLKIE轉EtherCAT網關配置:三菱PLC與匯川伺服通信最佳實踐
CC-LinkIEFB轉EtherCAT協議轉換網關實現三菱PLC與匯川伺服通訊的配置案例

三菱電機SiC DIPIPM在變頻家電中的應用(2)
三菱電機SiC DIPIPM在變頻家電中的應用(1)

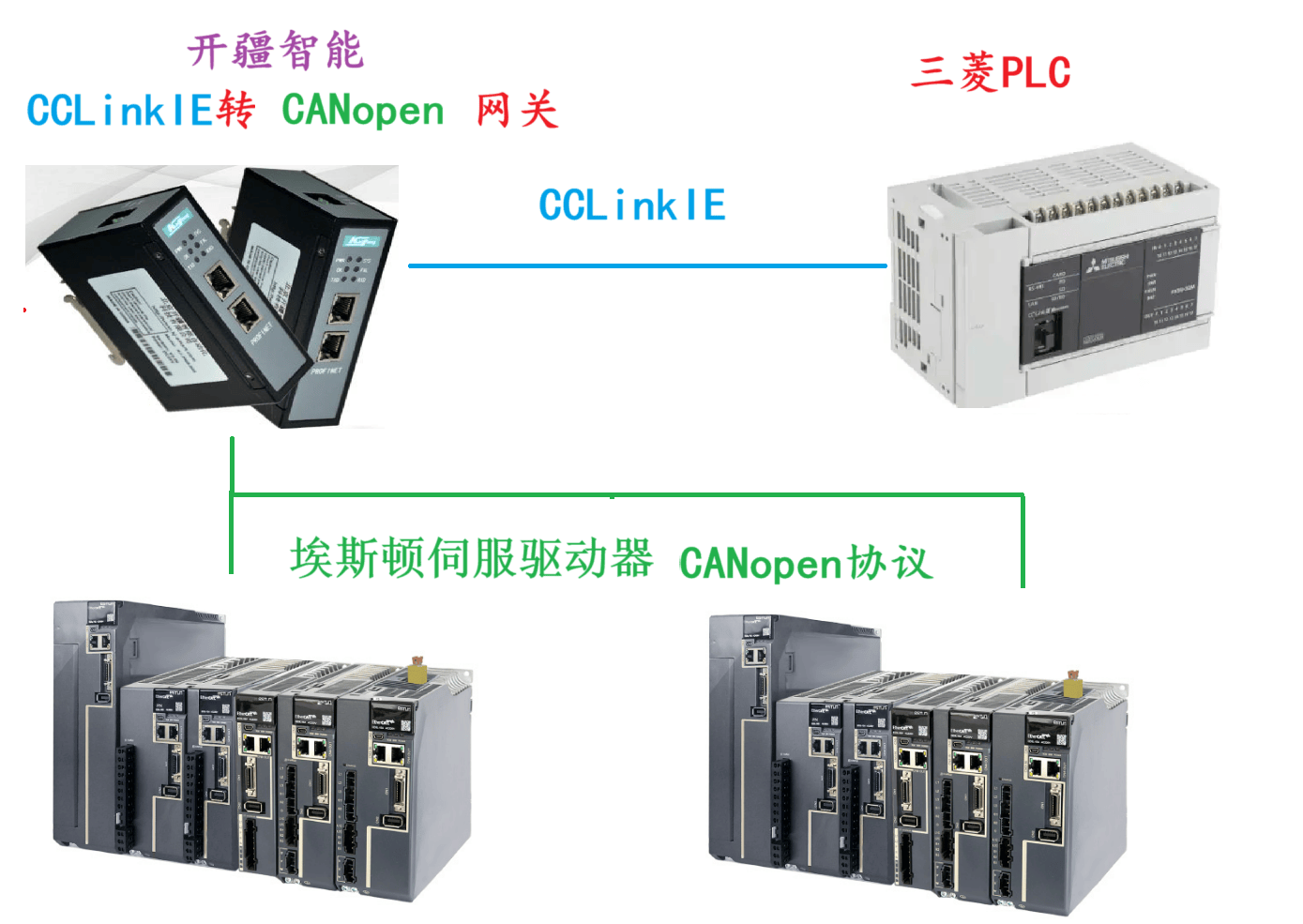
開疆智能CANopen轉CCLinkIE網關連接埃斯頓伺服系統配置案例
伺服系統和PLC各自在什么場合使用
CCLK IE轉EtherCAT依靠網關實現三菱PLC、匯川伺服高效通訊的案例?

CANOpen轉PROFINET網關連接低壓伺服系統



 工商網監
工商網監
評論