") 基于YOLO算法實現(xiàn)鋼筋數(shù)量的智能盤點
基于YOLO算法實現(xiàn)鋼筋數(shù)量的智能盤點

建筑工地在鋼筋成車來料時,需要人工清點數(shù)量,然后才能開展后續(xù)工作,不僅效率低,而且增加運營成本。隨著大數(shù)據(jù)時代的到來,建筑行業(yè)希望借助智能終端設(shè)備來減少勞動力的投入,打破傳統(tǒng)的桎梏。本文利用YOLO算法實現(xiàn)鋼筋數(shù)量的智能盤點。
在工地現(xiàn)場,對于進場的鋼筋車,驗收人員需要對車上的鋼筋進行現(xiàn)場人工點根,確認數(shù)量后鋼筋車才能完成進場卸貨。目前現(xiàn)場采用人工計數(shù)的方式。
鋼筋點跟現(xiàn)場場景上述過程繁瑣、消耗人力且速度很慢(一般一車鋼筋需要半小時,一次進場盤點需數(shù)個小時)。針對上述問題,希望通過手機拍照-》目標檢測計數(shù)-》人工修改少量誤檢的方式智能、高效的完成此任務(wù):
主要難點
(1)精度要求高(High precision requirement )
鋼筋本身價格較昂貴,且在實際使用中數(shù)量很大,誤檢和漏檢都需要人工在大量的標記點中找出,所以需要精度非常高才能保證驗收人員的使用體驗。需要專門針對此密集目標的檢測算法進行優(yōu)化,另外,還需要處理拍攝角度、光線不完全受控,鋼筋存在長短不齊、可能存在遮擋等情況。
(2)鋼筋尺寸不一(Various dimensions of rebars)
鋼筋的直徑變化范圍較大(12-32中間很多種類)且截面形狀不規(guī)則、顏色不一,拍攝的角度、距離也不完全受控,這也導(dǎo)致傳統(tǒng)算法在實際使用的過程中效果很難穩(wěn)定。
(3)邊界難以區(qū)分(Indistinguishable boundaries )
一輛鋼筋車一次會運輸很多捆鋼筋,如果直接全部處理會存在邊緣角度差、遮擋等問題效果不好,目前在用單捆處理+最后合計的流程,這樣的處理過程就會需要對捆間進行分割或者對最終結(jié)果進行去重,難度較大。
基于鋼筋進場現(xiàn)場的圖片和標注,綜合運用計算機視覺和機器學習/深度學習等技術(shù),實現(xiàn)拍照即可完成鋼筋點根任務(wù),大幅度提升建筑行業(yè)關(guān)鍵物料的進場效率和盤點準確性,將建筑工人從這項極其枯燥繁重的工作中解脫出來。
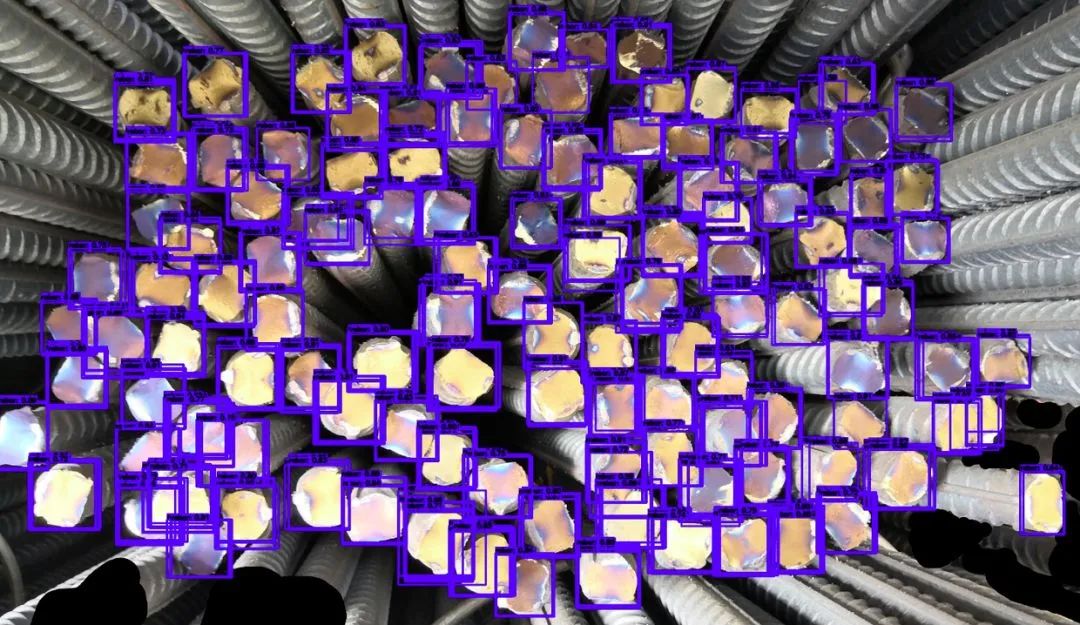
效果:線上 0.96+
審核編輯:郭婷
-
智能終端
+關(guān)注
關(guān)注
6文章
1020瀏覽量
36516 -
大數(shù)據(jù)
+關(guān)注
關(guān)注
64文章
9062瀏覽量
143743
原文標題:智能盤點!基于Yolov3的鋼筋檢測計數(shù)
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
倉庫盤點誤差大總出錯,咋整?試試智能盤點解決方法

機器視覺雙雄YOLO 和 OpenCV 到底有啥區(qū)別?別再傻傻分不清!
YOLO + OpenPLC + ARMxy:工業(yè)智能化視覺識別、邊緣計算、工業(yè)控制的“三位一體”解決方案

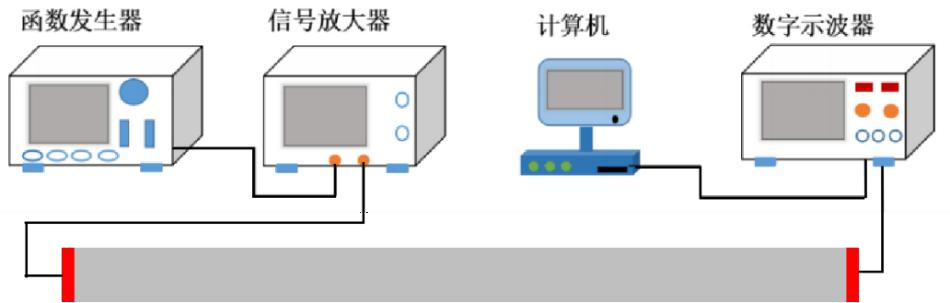
電壓放大器在鋼筋剝離損傷識別試驗中的創(chuàng)新應(yīng)用成果
RK3576 yolo11-seg訓(xùn)練部署教程

如何在樹莓派 AI HAT+上進行YOLO姿態(tài)估計?

如何在樹莓派 AI HAT+上進行YOLO目標檢測?
在樹莓派5上開啟YOLO姿態(tài)估計識別之旅!
在樹莓派5上使用YOLO進行物體和動物識別-入門指南
精準盤點,無憂管理——RFID智能盤點終端解析
K230micropython下能實現(xiàn)同時用USB攝像頭和板載攝像頭YOLO識別并顯示在IDE上嗎?
VWR振弦式鋼筋計如何實現(xiàn)溫度零干擾精準測應(yīng)力?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論