 航位推算,實現高精度車載導航定位
航位推算,實現高精度車載導航定位

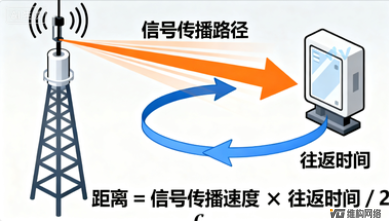
電子發燒友網報道(文/李寧遠)汽車在使用GPS或者GNSS定位時,需要同時接收到多個衛星信號才能保證精確定位。因此我們可以看到當汽車行駛到隧道等存在遮蔽的環境里時,GPS 或GNSS定位精度會出現不同程度的降低,甚至是完全丟失。
航位推算DR通常被用來彌補GPS 或GNSS的定位困難,在衛星定位精度降低的時候,航位推算通過使用來自各種傳感器(陀螺儀傳感器,加速度計,速度脈沖等)的信息來計算汽車當前位置,維持汽車的定位精度。
無聯機航位推算的精準定位
航位推算最常見的是使用IMU來推算車輛的即時航向。借助該信息再加上行駛的距離,導航系統可以正確確定車輛的位置。高端汽車中的航位推算ADR是將GNSS數據與從安裝在車身和車輪上的相關傳感器收集到的位置信息相結合,然后進行定位推算。這種最精準的定位需要車輛自身數據網絡集成度要足夠高。
那在車輛自身數據網絡集成度不那么高的情況下能否也實現比單GNSS更準確的定位呢?那就是無聯機航位推算UDR。無聯機航位推算可以實現比GNSS定位效果更好,且十分接近ADR。無聯機航位推算這種辦法并不需要與車輛網絡連接起來,它只將慣性傳感數據與GNSS數據結合起來推算得到車輛位姿信息。
無聯機航位推算模塊通過獲取IMU的角度和加速度的精確測量數據在GNSS信號被干擾或者失真時提供即時的定位修正。目前的能夠支持無聯機航位推算的芯片或模塊,車輛即使在沒有地圖匹配的情況下,位置精度也相當高,基本等同于車載導航精度。
特色技術下的航位推算芯片修正車輛位置信息
航位推算模塊現在有不少供應商在做,而且都開始推出無聯機航位推算功能。基本的原理都是相同的,具體的技術細節會有些不一樣,比如SkyTraq Technology的S1722DR8,結合GNSS位置數據、陀螺儀數據(測量轉角)和里程表數據(測量行駛距離)。-148dBm冷啟動靈敏使它能夠在極弱的信號環境中自動獲取、跟蹤和定位位置。SkyTraq Technology通過擴展卡爾曼濾波算法將GNSS和傳感器數據與依賴于GNSS信號質量的加權函數相結合,降低誤差效果顯著。SkyTraq Technology去年推出的PX1120D則是集成6軸IMU和四核GNSS,前裝應用提供wheel-tick融合航位推算,后裝應用則是滿足傳感器融合級別的無聯機航位推算,提供100%位置覆蓋。

SkyTraq Technology
u-blox的NEO-M9V模塊航位推算模塊同樣是IMU結合四核GNSS,提供無聯機航位推算,運用的dead reckoning(死區計算)技術,相較于單個GNSS模塊能夠提升三倍精度,在常見的環境中能做到分米級別的精度。NEO-M9V也使用了耦合的卡爾曼濾波器將追蹤精度的信息反饋到GNSS組件中,衡量所有GNSS和傳感器信號。NEO-M9V還有一個特點,高刷新頻率,提供實時的HNR。另外,模塊集成的SAW/LNA緩解了一部分射頻干擾。無聯機航位推算模塊里結合實時運動學(RTK)技術和校正服務的高精度算法在多頻段中可實現高精度位置的快速收斂和重新收斂。

帶-M9V模塊航位推算模塊的GNSS芯片,u-blox
ST的Teseo III,Teseo-VIC3DA模塊同樣結合了6軸IMU與GNSS IC,內置航位推算,不僅功耗更低,還加入了更高精度的載波相位跟蹤。-163dBm靈敏度跟蹤能夠實現1.5m CEP的精度定位。Teseo-VIC3DA 的航位推算定位速率高達30Hz,延遲很低,可以大幅減少UART通道抖動。ST硬件設計上的領先性在該模塊里也得以體現,Teseo-VIC3DA在16.0 mm x 12.2 mm 的小尺寸內,由于板載提供了卓越的準確性溫度補償晶體振蕩器(TCXO)和縮短的首次定位時間(TTFF)。
雖然各個不同廠商的航位推算模塊使用的特色硬件、軟件技術不一樣,但是原理相同,都是通過收集傳感器內部的數據計算出當前位置相對于上一次衛星定位的距離。當然,想實現高精度的航位推算對傳感器的要求也很高,除了必要的精度之外,器件功耗必須要低,這樣才能始終保持開啟模式,并為航位推算提供數據。
如何進一步提高航位推算精度
從上面這些航位推算模塊我們可以看到,IMU是相當重要的。IMU測量車輛的旋轉速率,代表車輛即時航向的角度通過計算旋轉速率的時間積分而求得,再結合航向和行駛距離即可以確定車輛的位置。在航位推算導航中使用IMU的一個重大挑戰是,衛星信號可能會丟失較長時間,結果使累積角度誤差過大而無法精確定位車輛。
從計算的角度來說,隨著所需積分時間變長,累積誤差會隨之變大,這也是為什么在航位推算應用中,較長的運行時間會導致精度出現偏差。想要提升推算精度,提升傳感器整體性能當然是一個方法,減少IMU的速率誤差是很傳統的降低角度誤差的辦法。不過從現在的MEMS系統來看,車規級IMU已經做到很精密了,在這一性能上改善的空間有限。
那另一個角度,就是通過縮短積分時間來降低誤差。一般使用低通濾波器來縮短這個時間,用低通濾波器過濾掉數字域中的噪聲,減少無效的積分時間。在IMU中,設定一個閾值,小于該閾值的速率樣本做歸零處理,在航位推算時只取剩下的有效速率。受IMU本身性能(主要是噪聲)的影響,這些無效積分時間有時候會很多,甚至超過有效積分時間。在過濾之后,積分時間大大縮短,累積的角度誤差也可以明顯降低。
在傳感器性能能提升的空間相對有限的情況下,通過低通濾波器縮短積分時間是一種簡單且有效地提升航位推算精度的方法。
小結
在GPS 或GNSS無法獨立工作的場景里,如何精準定位車輛需要依賴航位推算。目前航位推算模塊也表現出完全匹配車載導航水平的高定位精度,大大降低了車載導航的局限性。
航位推算DR通常被用來彌補GPS 或GNSS的定位困難,在衛星定位精度降低的時候,航位推算通過使用來自各種傳感器(陀螺儀傳感器,加速度計,速度脈沖等)的信息來計算汽車當前位置,維持汽車的定位精度。
無聯機航位推算的精準定位
航位推算最常見的是使用IMU來推算車輛的即時航向。借助該信息再加上行駛的距離,導航系統可以正確確定車輛的位置。高端汽車中的航位推算ADR是將GNSS數據與從安裝在車身和車輪上的相關傳感器收集到的位置信息相結合,然后進行定位推算。這種最精準的定位需要車輛自身數據網絡集成度要足夠高。
那在車輛自身數據網絡集成度不那么高的情況下能否也實現比單GNSS更準確的定位呢?那就是無聯機航位推算UDR。無聯機航位推算可以實現比GNSS定位效果更好,且十分接近ADR。無聯機航位推算這種辦法并不需要與車輛網絡連接起來,它只將慣性傳感數據與GNSS數據結合起來推算得到車輛位姿信息。
無聯機航位推算模塊通過獲取IMU的角度和加速度的精確測量數據在GNSS信號被干擾或者失真時提供即時的定位修正。目前的能夠支持無聯機航位推算的芯片或模塊,車輛即使在沒有地圖匹配的情況下,位置精度也相當高,基本等同于車載導航精度。
特色技術下的航位推算芯片修正車輛位置信息
航位推算模塊現在有不少供應商在做,而且都開始推出無聯機航位推算功能。基本的原理都是相同的,具體的技術細節會有些不一樣,比如SkyTraq Technology的S1722DR8,結合GNSS位置數據、陀螺儀數據(測量轉角)和里程表數據(測量行駛距離)。-148dBm冷啟動靈敏使它能夠在極弱的信號環境中自動獲取、跟蹤和定位位置。SkyTraq Technology通過擴展卡爾曼濾波算法將GNSS和傳感器數據與依賴于GNSS信號質量的加權函數相結合,降低誤差效果顯著。SkyTraq Technology去年推出的PX1120D則是集成6軸IMU和四核GNSS,前裝應用提供wheel-tick融合航位推算,后裝應用則是滿足傳感器融合級別的無聯機航位推算,提供100%位置覆蓋。
SkyTraq Technology
u-blox的NEO-M9V模塊航位推算模塊同樣是IMU結合四核GNSS,提供無聯機航位推算,運用的dead reckoning(死區計算)技術,相較于單個GNSS模塊能夠提升三倍精度,在常見的環境中能做到分米級別的精度。NEO-M9V也使用了耦合的卡爾曼濾波器將追蹤精度的信息反饋到GNSS組件中,衡量所有GNSS和傳感器信號。NEO-M9V還有一個特點,高刷新頻率,提供實時的HNR。另外,模塊集成的SAW/LNA緩解了一部分射頻干擾。無聯機航位推算模塊里結合實時運動學(RTK)技術和校正服務的高精度算法在多頻段中可實現高精度位置的快速收斂和重新收斂。
帶-M9V模塊航位推算模塊的GNSS芯片,u-blox
ST的Teseo III,Teseo-VIC3DA模塊同樣結合了6軸IMU與GNSS IC,內置航位推算,不僅功耗更低,還加入了更高精度的載波相位跟蹤。-163dBm靈敏度跟蹤能夠實現1.5m CEP的精度定位。Teseo-VIC3DA 的航位推算定位速率高達30Hz,延遲很低,可以大幅減少UART通道抖動。ST硬件設計上的領先性在該模塊里也得以體現,Teseo-VIC3DA在16.0 mm x 12.2 mm 的小尺寸內,由于板載提供了卓越的準確性溫度補償晶體振蕩器(TCXO)和縮短的首次定位時間(TTFF)。
雖然各個不同廠商的航位推算模塊使用的特色硬件、軟件技術不一樣,但是原理相同,都是通過收集傳感器內部的數據計算出當前位置相對于上一次衛星定位的距離。當然,想實現高精度的航位推算對傳感器的要求也很高,除了必要的精度之外,器件功耗必須要低,這樣才能始終保持開啟模式,并為航位推算提供數據。
如何進一步提高航位推算精度
從上面這些航位推算模塊我們可以看到,IMU是相當重要的。IMU測量車輛的旋轉速率,代表車輛即時航向的角度通過計算旋轉速率的時間積分而求得,再結合航向和行駛距離即可以確定車輛的位置。在航位推算導航中使用IMU的一個重大挑戰是,衛星信號可能會丟失較長時間,結果使累積角度誤差過大而無法精確定位車輛。
從計算的角度來說,隨著所需積分時間變長,累積誤差會隨之變大,這也是為什么在航位推算應用中,較長的運行時間會導致精度出現偏差。想要提升推算精度,提升傳感器整體性能當然是一個方法,減少IMU的速率誤差是很傳統的降低角度誤差的辦法。不過從現在的MEMS系統來看,車規級IMU已經做到很精密了,在這一性能上改善的空間有限。
那另一個角度,就是通過縮短積分時間來降低誤差。一般使用低通濾波器來縮短這個時間,用低通濾波器過濾掉數字域中的噪聲,減少無效的積分時間。在IMU中,設定一個閾值,小于該閾值的速率樣本做歸零處理,在航位推算時只取剩下的有效速率。受IMU本身性能(主要是噪聲)的影響,這些無效積分時間有時候會很多,甚至超過有效積分時間。在過濾之后,積分時間大大縮短,累積的角度誤差也可以明顯降低。
在傳感器性能能提升的空間相對有限的情況下,通過低通濾波器縮短積分時間是一種簡單且有效地提升航位推算精度的方法。
小結
在GPS 或GNSS無法獨立工作的場景里,如何精準定位車輛需要依賴航位推算。目前航位推算模塊也表現出完全匹配車載導航水平的高定位精度,大大降低了車載導航的局限性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
車載導航
+關注
關注
3文章
81瀏覽量
19351 -
航位推算
+關注
關注
0文章
4瀏覽量
363
發布評論請先 登錄
相關推薦
熱點推薦
告別雙天線高成本:單天線組合導航系統實現0.1°高精度
在智能裝備快速演進的今天,精準、可靠且低成本的定位與姿態感知已成為各類無人系統與自動駕駛應用的核心需求。ER-GNSS/MINS-07 低成本單天線組合導航系統的推出,正是為了在保證高精度導航

北斗衛星導航定位從核心框架到定位流程詳解(一)
我國北斗系統通過“空間星座+地面控制+用戶終端”協同,以偽距測量和空間后方交會為核心,實現從米級到厘米級的高精度定位,廣泛應用于導航、測繪、交通等領域。
云翎智能RTK高精度定位鐵路工作記錄儀:以高精度時空數據守護萬里鐵路軌道線路
云翎智能RTK高精度定位鐵路工作記錄儀,以厘米級時空精度為針,將萬里鐵軌的每一寸脈絡、每一處節點,都縫入智能守護的數字經緯——從北斗衛星的差分信號到慣性導航的

藍牙定位技術原理:從BLE信號到高精度定位的實現邏輯
藍牙定位憑借低成本、低功耗與高兼容性,依托BLE信號實現從粗略到高精度的定位。通過RSSI、ToF測距與AoA/AoD測向技術,結合多基站協同和算法優化,可
中海達205年度智能駕駛車載高精度定位產品突破百萬交付
截至今日,公司本年度智能駕駛車載高精度定位產品已交付超1000000套,這標志著公司智能駕駛與導航控制應用業務進入產業化規模發展新里程。
Swift Navigation與導遠科技合作打造高精度衛星定位解決方案
的 Skylark 精密定位服務實現全面兼容。Skylark 是一種基于云的服務,可將 GPS 等標準全球導航衛星系統(GNSS)的精度從數米提升至數厘米。
從軌尖到云端:云翎智能rtk高精度定位工作記錄儀構建鐵路巡檢數字孿生
云翎智能RTK高精度定位工作記錄儀通過厘米級定位、多源數據融合及數字孿生技術,構建了鐵路巡檢的虛實映射體系,實現了從軌尖物理世界到云端數字世界的全流程智能化管理,具體體現在以下核心層面
毫米級定位+全場景記錄:鐵路高精度定位工作記錄儀助力鐵路線路巡查
鐵路高精度定位工作記錄儀通過毫米級定位與全場景記錄技術,實現了鐵路線路巡查的智能化升級,顯著提升了巡檢效率、安全性和數據可靠性,成為保障鐵路安全運營的關鍵工具。云翎智能
單天線也能高精度導航?組合導航如何做到低成本與高性能兼得?
,結合高可靠性MEMS慣性測量單元(IMU),以更低的成本提供厘米級定位、0.1°姿態與航向精度,成為低成本高精度導航的理想選擇。

尋找低成本高精度的組合導航方案
ER-GNSS/MINS-05組合導航系統應運而生,它以技術創新和系統優化實現了性能與成本的完美平衡。該系統深度融合慣性與衛星數據,提供包含位置、速度、姿態和航向的全參數導航信息,定位

為什么MEMS組合導航系統是未來高精度定位的終極解決方案?
在當今科技飛速發展的時代,精準導航已成為眾多領域不可或缺的關鍵技術。從大型無人機的高空作業,到智能無人車輛的地面行駛,再到自主水下航行器的探索,高精度、高可靠性的導航系統是保障任務順利完成的核心
這款MEMS組合導航系統如何做到60秒高精度導航?
在無人機測繪、智能駕駛、水文測量等高精度定位領域,傳統導航系統往往受限于衛星信號遮擋或慣性傳感器的漂移誤差。ER-GNSS/MINS-01 MEMS組合導航系統突破技術瓶頸,將全頻點G

低成本組合導航能實現精準導航定位
在自動化、無人系統和精準農業等領域,高精度導航是核心需求,但傳統高端組合導航系統的高成本往往讓許多用戶望而卻步。ER-GNSS/MINS-05作為一款低成本組合導航系統,通過技術優化與

高精度組合導航系統:技術與應用的革新者
組合導航系統集成了MEMS?慣性導航與多頻點雙天線?GNSS?,憑借其高精度、高可靠性和強適應性,成為航空、陸地及航海復雜場景下的理想選擇。ER-GNSS/MINS-03結合智能算法,能提供連續、穩定的
海積信息推出高精度組合導航終端
如今,精準導航已成為智慧出行不可或缺的核心要素,為滿足日益增長的精準定位需求,海積信息推出的高精度組合導航終端,可以完美實現



 工商網監
工商網監
評論